
无线巡检机器人在综合管廊的应用与研究
2024-01-03 09:09刘尚珺
设备管理与维修 2023年22期
刘尚珺
(国能朔黄铁路发展有限责任公司原平分公司,山西忻州 034100)
1 无线巡检机器人的应用
城市基础设施检修中,需在污水井、采暖管道、雨水管道内进行检修。如果对管道或受限空间内部气体、压力等情况不了解,盲目下井存在严重的人身安全隐患,可能危及工作人员的生命。利用无线巡检机器人完成巡检工作可以避免人身安全风险。无线巡检机器人可以对城市管廊的现场视频画面、环境温、湿度以及有毒、有害气体浓度等要素进行不间断采集,实现无线巡检机器人对城市综合管廊的巡检,并针对其他固定式在线监测系统无法完全覆盖的情况进行有效补充。
系统由现场设备和监控中心设备两部分组成。现场设备部署在管廊电力通信舱、综合舱部分部署在最外侧电力舱,包括巡检机器人、机器人轨道、分布式充电器、机器人防火门及防火门控制器等设备。
巡检机器人采用悬挂轨道安装方式,搭载红外热像仪、可见光高清摄像机、气体检测仪、温湿度传感器、停障系统等设施,实现自动检测、远程控制、智能识别以及人机交互等功能。
机器人轨道型材由高强度铝合金制作,采用预埋施工的方式安装在管廊中部顶面。在进料口等特殊位置需采用弧轨避开特殊口,通过分段拼接方式进行延伸,并可根据管廊具体情况设置弯曲度和坡度。在爬坡时,通过机器人车体上的自动张紧装置实现车轮和轨道的自动张紧,从而增大摩擦力。
1.1 涵洞边沟检测
在涵洞边沟内空间狭小、环境无光。为满足此类检测环境,管道机器人配备了照明系统,以保证视频拍摄清晰度。遇到边沟内地势不平的环境时,机器人的防振系统可以保证拍摄视频无剧烈晃动,使监控人员能更好地通过视频发现边沟内的问题所在。
悬挂机器人在行走的同时可以转换信号采集和传输方式,无需使用传统机器人控制器即可完成PAD 无线操控,将视频信号高效地采集、传输至电脑软件,实时显示管道内部情况。
机器人搭载有气体检测模块,可以通过远程控制移动机器人对管道以及箱涵、污水井等不同区域的有毒气体和环境温度等进行实时监控,弥补了固定监测装置检测范围小等缺点。当有害气体超标或环境温度异常时,机器人会自动报警,并将现场采集到的数据传输到控制中心。
1.2 井内检测
对于井内检测等特殊情况,需要机器人探测障碍物并避让管线。机器人搭载有红外避障系统,可以在探测到障碍物后进行自动避障,也可以通过控制器人转弯、后退,进行人工避障。
2 无线巡检机器人相关技术研究
2.1 有毒气体检测机器人研究
研究有毒气检测机器人在受限空间内对有毒气体检测的功能,并通过室内测试与室外环境测试进行完善优化。实现受限空间顶部、中部和底部的全方位检测目标,对受限空间内部的CO、H2S、O2、可燃气体Ex、CO2、NOx等浓度进行实时检测。
2.2 机器人无线控制技术研究
研究机机器人控制系统的需求,创建局域网,满足控制系统运行的通信需求。利用电池动力系统架设内部控制信号网络,通过笔记本电脑或其他终端(手机)操控软件,直接对电池动力系统发出控制信号,动力系统接收到命令后传送至机器人,实现机器人前进、后退以及转弯等动作。
2.3 高清视频画面传输技术研究
早期视频采集设备采用模拟信号进行传输,抗干扰能力较差。利用数字信号代替模拟信号进行传输,对时延扩展有较强的保持信号完整性的能力,减少信号间干扰的影响,实现了高清视频的无延时采集和传输,提高检测精度。
2.4 检测软件研究
研制采集数据分析及评估软件,实时高清视频画面拍摄、视频数据采集、终端控制等功能,可对检测视频文件进行播放预览、添加检测信息、截取缺陷图像、判读描述等。将判读结果数据自动生成为图文形式的检测报告,包括项目信息、工程概况、有毒气体含量等参数。转换使用预设的数据接口,能嵌入GIS 系统,提供电子地图查阅功能,在电子地图中标注出作业点的位置,实时对作业点数据进行查看,并将缺陷分布图导出为网页格式,以供数据上报、分阅。
3 无线巡检机器人功能研究
3.1 高温预警功能
在管廊/管道中,电缆、接地线等温度异常主要体现在电流致热型,而电缆接头是电流致热与电压致热都可能存在的混合模式,往往导致设备温度升高,因此对设备的温度测量与监控至关重要。
(1)对于管廊内交叉接地箱、电缆接头、接地线等易发热的关键输电设备,需要对其进行实时温度监控。
(2)机器人在测温过程中检测到异常发热点时,将自动启动系统高温报警功能,提示控制人员实施进一步的故障排查。
(3)在设备运行期间对其进行高温预警监控。
(4)系统输电线路过负荷等情况下,尤其需要对相应重点设备进行温度检测。
3.2 环境信息采集功能
管廊内因通风条件差、温度高、易积水等问题,容易出现有害气体含量超标的情况,形成人身安全和设备运行隐患。管廊/管道巡检机器人自身携带环境监测模块,可以实时监测管廊中O2、H2S、CO、CH4等气体的浓度及温度、湿度、烟雾等环境信息。机器人能将实时采集的环境信息及时传输到控制中心,为控制人员提供现场环境信息,以利于操控人员的决策。传感器系统结构如图1 所示。

图1 传感器系统结构
传感器系统的特点有:
(1)采用定制化的专用传感器,通信接口统一。
(2)传感器接口采用通用的工业标准,支持Modebus 或CANopen 通信协议。
(3)总线拓扑结构清晰,线路简洁,提高系统可靠性。
(4)后续增加的功能设备可通过通信总线接入系统,兼容性、可扩展性强。
3.3 管廊综合平台联动功能
城市综合管廊无线检测机器人与机器人综合管理平台之间采用标准通信协议对接,机器人综合管理平台中有专门针对无线检测机器人的定制化智能联动业务模块,可通过管廊中的位置信息将机器人与管廊内的监测设备无缝结合起来,实现数据联动展示、系统联动智能分析、报警智能处理等业务。
机器人综合管廊管理平台可以实时显示机器人在管廊中的位置、录制的视频、传感器采集的数据等,将采集的数据进行分析,并形成相应的曲线、报表等进行存储,方便运维人员及专家查看分析,同时可以将采集及分析的数据上传至运维中心的管廊综合控制系统平台。
4 无线巡检机器人设计
无线巡检机器人系统主要包括:
(1)智能巡检机器人、机器人轨道、分布式自主充电器、机器人防火门设备及配套设施。
(2)后端管理服务器、机器人巡检系统管理平台软件及与综合管廊统一管理平台的通信接口。
(3)无线巡检机器人巡检系统管线材料、吊装支架套件等附属材料(包括主材与辅材)。
(4)工程设备、材料及所有零配件货物的采购、运输、施工安装、系统调试及工程验收、人员培训等,以及为满足设计院图纸要求所产生的工程服务。
本文设计的巡检机器人采用蓄电池供电方式,车体重量25 kg(图2)。对无线巡检机器人进行受力分析(图3)。
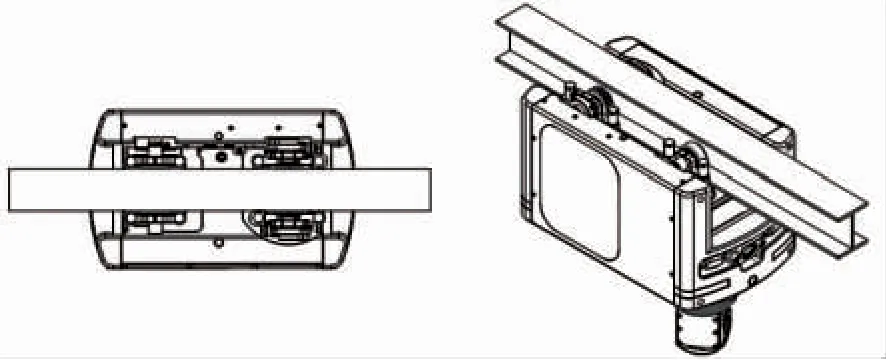
图2 无线巡检机器人结构
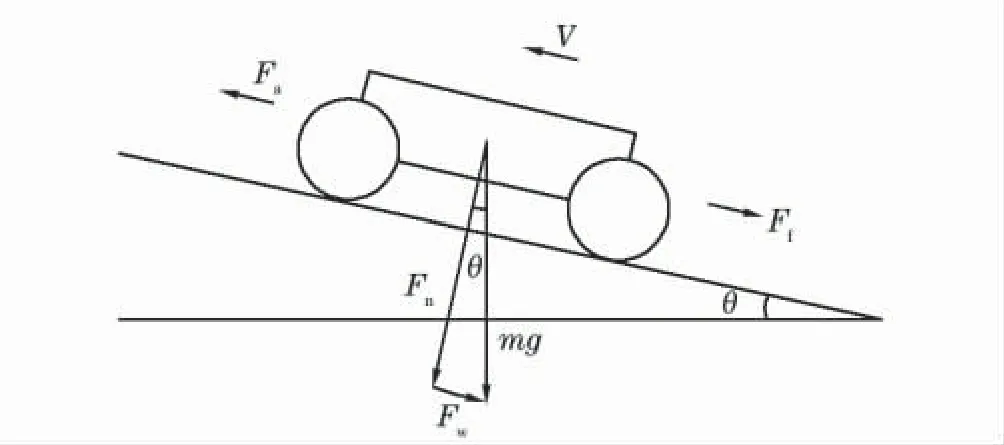
图3 无线巡检机器人受力分析
图3 中,Fa为机器人的牵引力,Ff为机器人上坡时所受摩擦力,mg 为机器人所受重力,Fw为机器人重力沿斜面方向的分力。车轮和斜面的滚动摩擦因数μ=0.6(橡胶轮和钢轨)。
对机器人所需要的牵引力进行分析计算:
代入数据计算,可得驱动小车爬坡所需的牵引力Fa=612 N,则所需牵引力矩为M1=Fa×D/2=15.27 N·m,总减速比为K=1∶62,故所需电机的输出转矩为M0=M1×K=0.246 N·m。
根据上述计算结果,选用某品牌空心杯电机,其特性曲线如图4 所示。该电机在结构空间安装、驱动速度等方面均能满足设计要求(图5)。

图4 电机特性曲线

图5 电机安装空间示意
通过以上分析,可以确认该管廊巡检机器人方案可行。
5 结束语
城市综合管廊无线检测机器人可以在涵洞边沟等空间狭小、环境无光的环境中使用,可通过无线传输技术实现机器人远程操控,且具有红外避障系统,能在探测到障碍物后进行自动避障,也可以通过人工手动操作控制器进行转弯、后退,实现人工避障。无线巡检机器人可以对管道、箱涵以及污水井等不同区域的有毒气体和气体温度等进行实时监控,从而提高工作效率。
猜你喜欢
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
无线互联科技(2021年4期)2021-04-21
安全(2020年2期)2020-04-16
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
江西建材(2018年2期)2018-04-14
电子制作(2016年15期)2017-01-15
中国工程咨询(2016年2期)2016-02-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
