
基于多传感器融合的泊车位信息感知终端设计
2024-01-03 13:37朱嘉睿熊树生赵家豪吴占宽韩泽宇
现代机械 2023年6期
朱嘉睿,熊树生,2▲,赵家豪,吴占宽,韩泽宇
(1.浙江大学,浙江 杭州 310012;2.浙江省龙泉产业创新研究院,浙江 丽水 323700)
0 引言
随着经济社会的进步与发展,汽车保有量和现有泊车位之间的供需矛盾正日益凸显,由此带来的“停车难”问题受到了社会各界的广泛关注。由此,城市道路侧停车作为一种缓解停车压力的方式,在近年来开始逐渐兴起,而当前大部分路边泊车位的主要管理方式仍然以人工监管方法为主,智能检测技术为辅,甚至在部分地区还出现无人监管的状况。
本文针对当前仅依赖人工的城市道路侧停车管理效率低下,而现存的智能道路侧停车管理系统检测准确度亟需提高的问题,以提高城市交通智能化为目的,设计了一种基于多传感器融合的泊车位信息感知终端。
该终端基于模糊逻辑理论和D-S证据理论的多传感器融合算法,实现对地磁传感器、微波雷达、红外位移传感器三种传感器采集信息的有效融合,并得出综合判决结果,实现对车辆在位信息进行有效监测。
1 泊车位信息感知终端框架设计
泊车位信息感知终端节点部署在泊车位上,是智能道路侧停车管理系统的重要组成部分,其利用自身的传感器采集泊车位信息值,并基于特定算法实现对车辆在位状态的有效监测,最后将泊车位的车辆占用信息上报至后端服务器,方便路边巡查人员进行泊车位的管理和收费。
泊车位信息感知终端的硬件部分包括传感器壳体以及硬件电路。其中硬件电路包括内部的传感器及信号处理单元、主控单元、通信模块和电源模块等;而壳体可分为上盖、中盖和下壳体三大部分,壳体结构除上盖采用透明PC材料外,其余部分均采用增强尼龙,并通过栅条状华夫饼、加强筋、增加壁厚等方式增加壳体结构强度。
终端采用标称额定电压为3.7 V的38000 mA·h锂离子电池ER34615硬件滤波后为终端供电,正常情况下使用可以满足两年的供电需求。在终端正常工作时,锂电池输出的3.7 V外部供电电压一路给蓝牙和NB-IoT模块供电,另一路经稳压模块后转成3.3 V电压为微波雷达和地磁传感器供电,而红外位移传感器则由升压模块转成的5 V电压供电。
2 泊车位信息感知终端硬件电路设计
2.1 传感器及信号处理单元
传感器及信号处理单元由USRR187P微波雷达、GP2Y0A21YK0F红外位移传感器、QMC5883地磁传感器构成。其中,QMC5883地磁传感器功耗最低,是车辆在位监测终端的主传感器,其硬件电路如图3所示,该传感器使用I2C与MCU通信,在硬件电路设计时将时钟线SCL和数据线SDA接上拉电阻以保证通讯的稳定性。
微波雷达(图4)和红外位移传感器(图5)功耗相对较大,为辅助传感器,二者均通过接插件与主板电路相连。其中微波雷达在完成上电初始化以及参数指令配置后会进入唤醒休眠模式,需要MCU通过串口发送唤醒指令对其唤醒,唤醒后雷达开启检测,返回障碍物有无信息。红外位移传感器输出电压值,该电压值与其探测距离成一定函数曲线关系,可通过最小二乘法对其进行拟合。
2.2 主控单元
终端采用意法半导体公司的STM32L151CCT6芯片作为微处理器。该款芯片是32位Cortex-M3内核的ARM处理器,主频可高达32 MHz,足以保证数据传输的实时性,通信接口丰富,具有包括同步/异步串行通信接口、I2通信接口在内的通信接口。微处理器的低速外部时钟(LSE)及高速外部时钟(HSE)分别选用32.768 K和8 MHz石英晶振为晶振源。
2.3 通信模块
终端的通信部分采用移远BC28 NB-IoT无线通信模组,相较于LoRa等自组网络而言,更加稳定,能够满足各种室外场地的数据上行和下行需求。
蓝牙模块采用HJ-132c模块,休眠状态下其功耗小于5 μA,2 s间隔广播下电流仅为15 μA,可以满足产品的功耗需求。该模块供电电压范围为1.6~3.8 V,可直接用外置电池供电,提高了部署的灵活度。
3 泊车位信息感知终端软件设计
在现有的路边停车场景下,单一的传感器无法有效应对路边泊车位这一复杂的检测环境,存在较大的漏检概率,为提高检测的准确性,在算法设计综合各传感器对车位状态的判决,其中地磁传感器曲线包含信息丰富,为充分利用地磁变化曲线,地磁判决算法基于模糊理论实现,模糊逻辑系统解模糊后的输出信度将作为多状态机状态变更的重要判决依据之一,当地磁判决和其余传感器判决存在冲突后,终端将基于D-S证据理论进行综合判决。
3.1 基于模糊逻辑理论的地磁检测算法
3.1.1 数据预处理
为有效应用地磁传感器三轴数据,选用三轴磁场数据的平方和的二次方根值作为研究变量,该研究变量在本文中称作地磁综合值,用Ma(s)表示。如图7所示,车辆在出入位的过程中地磁综合值会发生剧烈波动,同时也会存在部分高频噪声,本文选用窗口值为6、加权系数K1~Kn的滑动加权滤波消除这部分噪声。
F(s)=
(1)
图8为经窗口值为6、加权系数集合K={0.1,0.1,0.15,0.15,0.2,0.3}的滑动加权滤波处理后的地磁综合值信号变化图。从图中可以看出,地磁综合值变化曲线的高频噪声被较好地抑制,而主体特征保留完好,同时,波形的实时性较好,满足滤波需求。
3.1.2 模糊逻辑推理
选用地磁综合值原始信号变化曲线上等周期间隔点连线的斜率绝对值Ki以及地磁综合值相对于基线偏移量的绝对值Mch作为系统的输入变量。对于斜率绝对值Ki组成的论域UK,可将其划分为H、M、L三个模糊集,分别代表高、中、低斜率绝对值;对于地磁综合值相对于基线偏移量的绝对值Mch组成的论域UM,也将其划分为H、M、L三个模糊集,分别代表高、中、低偏移量绝对值。
选用梯形型隶属度函数作为模糊化的工具。因此对于论域UK下的模糊子集L、M、H,其隶属度函数LK(x)、MK(x)、HK(x),可以用下列式子表示。
对于LK(x),有:
(2)
对于MK(x),有:
(3)
对于HK(x),有:
(4)
式中:Thk0、Thk1、Thk2、Thk3为斜率阈值,其值依次增大。且Thk0为判决的无车辆状态变更的最小临界斜率阈值,对于论域UM下的模糊子集L、M、H,其隶属度函数LM(x)、MM(x)、HM(x)在形式上与式(2)、式(3)、式(4)相似,此处不再一一赘述。
定制模糊逻辑推理规则如表1所示,逻辑规则基于“IF-THEN”形式体现。

表1 模糊逻辑推理规则
本文选用加权平均判决法处理获得最后的融合输出结果Pout,其表达式满足:
(5)
式中:fsi为各个推论的模糊量;σow为各个推论的模糊量权重。
在实际应用上述算法进行检测时,当输出结果概率大于0.85时,地磁传感器判定此时泊车位存在车辆状态变更。
3.2 基于D-S证据理论的多状态机检测算法
如图9所示为本文设计的泊车位车辆检测状态机,该状态检测机总共分为7种状态,其中中间状态有5个,Occupied以及Vacant为状态机的最终稳定状态。
Initiate:该状态是泊车位信息感知终端上电后的初始状态,在完成上电初始化后,只有当Radar_detection=0(雷达检测无障碍物)时,才会转到Vacant状态。
Vacant:该状态表明泊车位上不存在车辆。在此状态下会对停车位状态值State置0以更新该值。当前仅当满足斜率Ki大于Thk0或偏移量Mch大于Thm0时,程序会转入下一状态,即采用FL模糊逻辑推理对地磁信息进行融合处理,否则会在此处停留。
FL:该状态为模糊逻辑推理状态。依据3.1节所述算法对地磁综合值曲线斜率Ki和偏移量Mch进行信息融合处理,根据模糊推理系统输出信度Pout和判决阈值0.85的相对大小,做出最终判决。当State等于1(车位占用),若逻辑推理系统输出量Pout大于判决阈值0.85,说明此时地磁传感器判定当前泊车位上的车辆状态发生变更,此时会转入Uncertain Vacant State 状态;若Pout小于判决阈值则说明这是泊车位有车状态下的一次小的地磁扰动,且未发生车辆状态变更,此时转入Occupied状态。相应地,当State为0(车位空闲),若Pout大于判决阈值,此时会转入Uncertain Occupation状态;若Pout小于判决阈值,则返回Vacant状态。
Occupied:该状态为泊车位占用状态。此状态下会对停车位状态值State置1以更新该值。在该状态下,当前仅当满足斜率Ki大于Thk0或偏移量Mch大于Thm0时,程序会转入下一状态,即采用FL模糊逻辑推理对地磁信息进行融合处理,否则会在此处停留。
Uncertain Vacant State:该状态为非确定的泊车位空闲状态。在该状态下,当Radar_detection为0(雷达检测目标判决无障碍物)且红外位移传感器采集到的距离值Dinfrared大于其阀值Thf(红外位移传感器认为此时不存在车辆)时,则说明此时三个传感器均认为泊车位车辆状态为空,此时转入Vacant状态。若此时Radar_detection不为0(雷达检测目标判决存在覆盖或障碍物)或Dinfrared小于其阀值Thf(红外位移传感器认为此时存在车辆),则说明三传感器之间存在矛盾判决,此时交由DS融合机进行数据融合处理,并得到最终的判决结果。
Uncertain Occupation:该状态为不确定占用状态。在该状态下,若Radar_detection为0或红外位移传感器采集到的距离值Dinfrared大于其阀值Thf时,则此时三传感器之间的判决存在矛盾,此时将最终判决交由DS融合机对泊车位信息做最后的判决。若此时Radar_detection不为0且红外位移传感器采集到的距离值Dinfrared小于其阀值Thf,则此时三传感器的认知趋同,且一致认为泊车位上存在车辆,因此系统会转入Occupied状态。
DS:该状态为D-S融合处理状态。通过综合地磁传感器、红外位移传感器和微波雷达对泊车位信息的认知,得出最终的判决结果。由于转到DS状态的前状态为Uncertain Vacant State或Uncertain Occupation状态,二者的判别过程存在相似性,因此本文以前状态为Uncertain Occupation 对D-S融合算法作出说明。
首先确定D-S证据理论的识别框架Θ为:
Θ={Γ1,Γ2}
(6)
式中:Γ1表示泊车位上存在车辆占用,Γ2表示泊车位处于空闲状态。
基于识别框架得到的三条证据信息分别是:
证据1:基于地磁传感器的泊车位检测信息,构造基本信任分配函数M1α:
(7)
式中:α为证据权重因子,其所对应的调整范围为[0,1];Pout为依据模糊逻辑推理得出的信度值函数。
证据2:基于红外位移传感器的泊车位检测信息,构建红外位移传感器的信度量化函数Pinf_ce:
式中:Thf为红外位移传感器识别车辆有无覆盖上限阈值;Thl为红外位移传感器识别车辆有无覆盖下限阈值;ω为最优值权值系数,当距离D与ω·Thf越接近,Pinf_ce函数输出值越大;D为红外位移传感器和外界障碍物之间的距离。
此时的基本信度分配函数M2a为:
(8)
式中:β为证据权重因子。
证据3:基于微波雷达传感器的泊位检测信息,构造微波雷达的量化函数:
(9)
式中:RVal是微波雷达返回数据包中的障碍物信息位数值。
构造的基本信度分配函数为:
(10)
式中:γ为证据权重因子。
计算证据1、2和3融合后的冲突因子K1,2,3和信度值:
(11)
(12)
将设定的信度阈值Thr与M1,2,3(Γ2)比较,若M1,2,3(Γ2)大于Thr则输出0,跳转至Vacant状态,否则输出1,跳转至Occupied状态。
4 实验及结果分析
为测试验证该车辆在位远程监测系统的整体功能,我们将节点安装到浙江大学玉泉校区校内的停车位小批量部署测试,泊车位信息感知终端节点安装在泊车位中心靠后30 cm的位置,部署情况如图10所示,节点通过NB-IoT网络将数据传输到后台服务器。

图1 路边停车管理系统结构框图
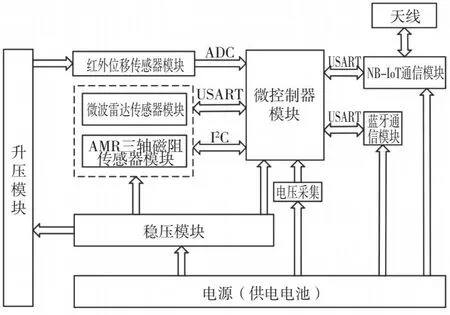
图2 泊车位信息感知终端节点结构框图
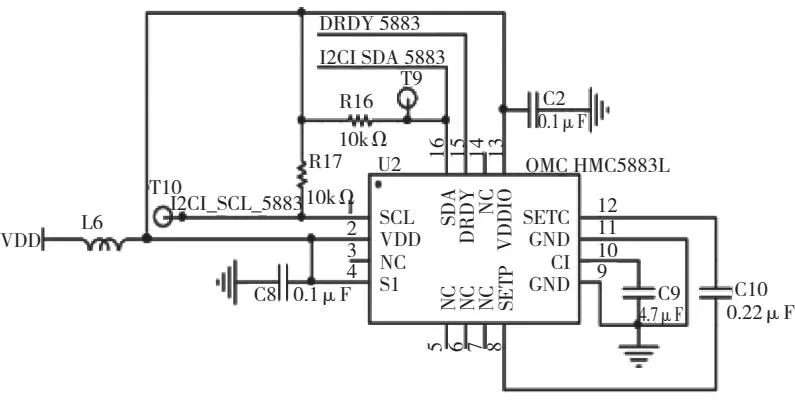
图3 地磁传感器电路

图4 微波雷达模块图5 红外位移传感器模块

图6 微控制器模块硬件电路

图7 车辆入位过程地磁综合值原始信号变化图

图8 滤波后的车辆入位过程地磁综合值原始信号变化图

图9 泊车位车辆检测多状态机
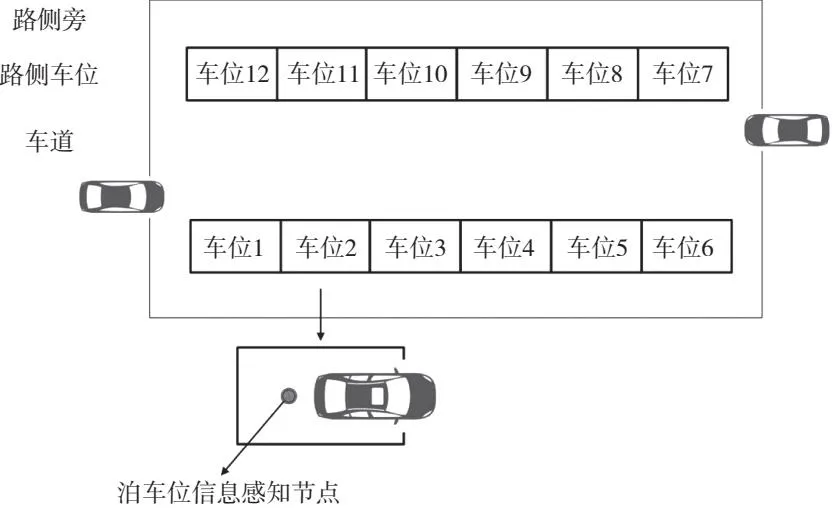
图10 路边部署示意图

图11 部署后的泊车位信息感知终端
在小批量部署测试中,我们在路侧旁安装监控,同时配合人工,观测泊车位实际的停车情况是否与服务器端上报情况相同。依据该方法对2022年3月21日至4月21日期间的停车情况进行统计,共计1181次,漏检9次,检测正确率达到99.2%。综上所述,该泊车位信息感知终端可以有效判断车位状态,对车位状态实现准确检测。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14
汽车实用技术(2022年19期)2022-10-19
环球时报(2022-05-23)2022-05-23
汽车实用技术(2022年7期)2022-04-20
金桥(2021年4期)2021-05-21
军民两用技术与产品(2020年3期)2020-04-07
制造技术与机床(2019年9期)2019-09-10
电子制作(2019年7期)2019-04-25
西南交通大学学报(2018年6期)2018-12-18
河北遥感(2017年2期)2017-08-07
