基于可变自主等级的有人机/无人机控制方法
2024-01-05 06:50杨继国尤灵辰杨大鹏
无人系统技术 2023年6期
张 冬,杨继国,尤灵辰,杨大鹏
(1. 中国航空工业集团公司沈阳飞机设计研究所,沈阳 110035;2. 空军装备部驻沈阳地区第一军事代表室,沈阳 110850;3. 北京航空航天大学自动化科学与电气工程学院飞行器控制一体化技术重点实验室仿生自主飞行系统研究组,北京 100083)
1 引 言
无人机(Unmanned Aerial Vehicle,UAV)具有成本低、风险低、感知敏锐、使用方便、没有人员伤亡等特点[1],近几年得到了广泛的应用。但是,无人机的智能化进程仍然有限,面对未来复杂多变的战场环境,无人机存在自主性低、协调性弱等问题,单独执行任务的难度仍然较大。有人机则具有感知力好,形势判断能力强等特点。为了实现人机智能优势互补,提高作战任务的成功率,有人机/无人机协同作战模式将是当下及未来研究的重点[2-3]。美国空军在《小型无人机系统(SUAS)飞行计划:2016—2036》中提出了“忠诚僚机”的概念,使用无人机辅助有人机飞行,以实现更高的任务效能[4]。使用有人机/无人机组成的编队进行作战将会是未来数年乃至数十年的主要作战形式[5]。
有人机/无人机集群控制是一个复杂的问题,从协同作战概念[6],到协同的体系框架[7]和作战体系设计[8]等众多方面都需要有所涉及。在有人机/无人机的实际控制方面,圣塔克拉拉大学的Mas等研究了一种集群空间控制技术,将多个无人机的参数转变为无人机集群空间的参量[9-10]。减少了需要控制的变量数量,简化了有人机对无人机集群的控制。德国慕尼黑联邦国防军大学Schwerd 等[11]从操作实践上提出了应用于有人/无人集群的操作系统框架与认知状态估计框架,文献[12]从有人/无人的网络建立、通信能力、网络聚类特征、网络效应、系统自主性等方面建立了有人机/无人机作战网络的评价指标。吴立尧等[13]和李腾[14]分别从有人机/无人机的简单动力学模型和飞机的实际模型出发,设计了不同的控制策略来完成有人机/无人机编队集结重构的相关内容。学喆等[15]设计了有人机/无人机交互决策架构,建立决策推理模型,进而选取合适的人机交互模式,实现人机决策。
在无人系统中,针对人的操作能力,将系统的自主能力与控制权限划分为多个等级,称为无人系统的自主等级。在不同的自主等级下,操作员具有不同的权限与操作需求。通过给系统设计不同的自主等级,能够合理利用人与机器的优点,在各自的场景下实现最佳的人机合作,实现优势互补。早在2000 年,Parasuraman 等就提出了变自主等级的相关理论,并将无人系统的行为自主性分为十个等级(如表1所示)[16],开创了变自主等级研究的先河。文献[17]研究了机器人三种不同的自主权限(人类全手动,机器人自主行动,人类给出路径点进行主导控制)在机器人穿越迷宫时的不同效果,实验结果证明,能自主调节系统自主性的系统取得了最好的综合效果,能够节省操作员的精力。Takeshi等[18]则并未采用显式更换自主等级的方案,而是将人类对复杂环境所具有的良好的判断能力与系统较好的操作能力结合起来,根据两者的输入指令,合理地选择更偏向哪一个指令。骆煜[19]设计了体现无人机能力的效用矩阵和体现用户期望的偏好矩阵,并对这两个矩阵进行处理,利用等级推理机制得到了适合当前态势的自主等级,并且设计了无人机变自主等级控制系统。文献[6]构建了操作员与无人机之间的关系,改进了经典的OODA 循环(即Observation 观察、Orientation 判断、Decision 决策、Action行动),在判断与决策前加入自主判断环节,根据态势将无人机的自主等级划分为四级,并根据不同的自主等级决定操作员对无人机的干预程度。李腾[14]设计了决策辅助系统,将决策行为告知操作员,再由操作员判断是否采用系统的判断,即更改了系统的决策等级。
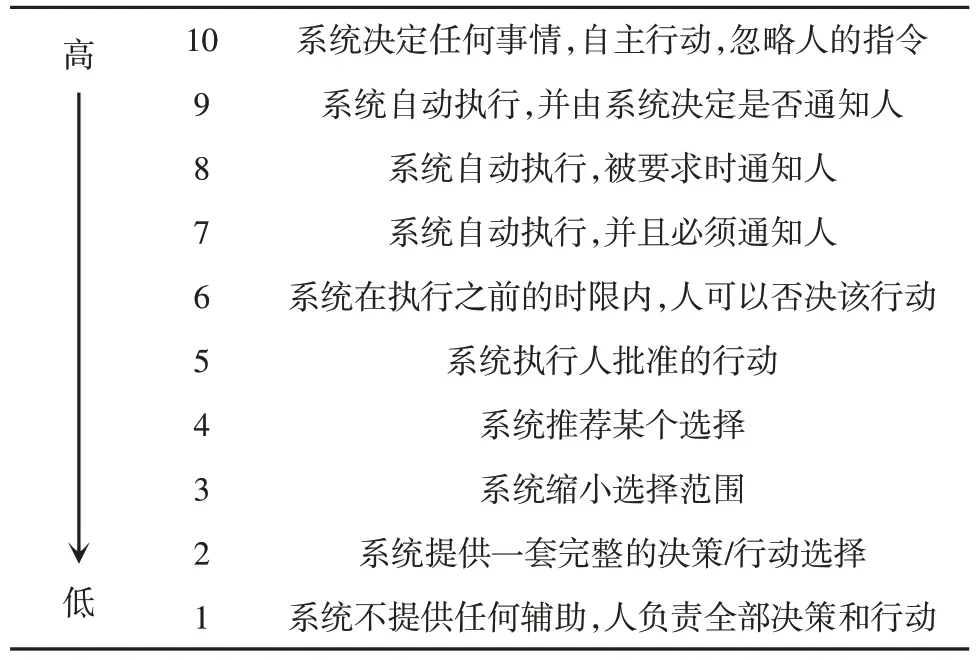
表1 无人系统自主等级Table 1 Unmanned system autonomy level

表2 不同情境任务评价指标Table 2 Evaluation for different control manners
综上所述,目前变自主权限的实现方法主要有两种,一种方法是由系统根据现有的态势情况,计算出适合当前态势的系统权限等级,根据不同的权限等级判断是否需要操作员进行干预,并且由操作员确定最终的自主等级。这种方法较为直观,但是目前的相关方法较少考虑不同自主等级对操作员不同的精力要求,实际的减负效果有限。另一种方法是在所有情况下都接受操作员的指令,但是在系统中加入了对操作员指令的判断,由系统选择对人或者系统控制指令的倾向程度。这种方法能够结合人与系统的优点,但是难以应对较为复杂的操作场景,同时需要较多人的干预,难以达到降低操作负担的效果。
据此,本文将围绕有人机/无人机变自主等级控制方法进行研究,基于态势评价的方法确定集群当前的自主等级,并且在该方法中,引入操作员精力损耗对自主等级的影响,更加合理地评估当前适合的自主等级,以降低操作员的操作负担。相比于固定等级的控制方案,本文所提出的控制方案更贴合未来有人机/无人机集群控制实战,更多考虑人的因素,具有更好的可操作性。
2 问题描述
2.1 任务想定与环境建模
假设有人机/无人机集群由一架有人机和三架携带探测传感器和任务载荷的无人机组成。验证场景中存在一个敌方目标和多处防空区域,验证任务是有人机和无人机集群通过所携带的探测传感器侦察防空区域,指挥集群编队前往目标区域。当越过防空区域到达指定的任务地点后,集群对任务目标进行打击,完成任务,并检验本文所设计的变自主等级控制的可行性。
在环境中,本文设计一个假想的敌军防空区,防空区在环境中随机分布,具有一定的危险范围,飞机在防空区外飞行被认为是安全的,而在防空区内飞行则会存在被击落的危险。因此,要求有人机/无人机组成的飞行集群在飞抵目标进行打击的过程中不能与环境中的防空区产生任何的相交部分,否则判定打击任务失败。
一个简单防空区示例如图1所示。
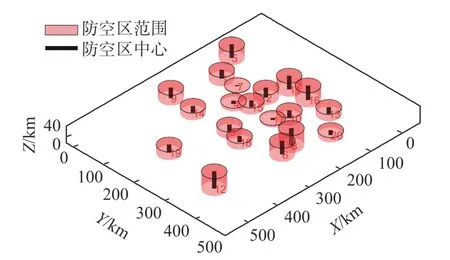
图1 敌方防空区建模示意图Fig.1 Example of enemy anti-air region
图中,黑色竖线表示一个防空区的中心,具有不同的防御高度。红色圆柱状区域即代表防空区的危险范围,有人机/无人机集群中的任何一架飞机都应当尽量避免与危险范围有所相交。
2.2 有人机运动学模型
本文研究侧重点在于有人机与无人机集群的变自主等级控制方法,而并非有人机与无人机的底层飞行控制。因此在本文中,有人机与无人机的差异主要体现在两者不同的运动学方程,以及因此具有的不同控制方法。根据文献[20],采用经典的带推力的飞机模型作为有人机的运动学模型,取发动机推力T,法向过载n与滚转角ϕ为有人机的控制量,并假设有人机的侧滑角与攻角均较小,可以忽略不计,因此有人机的运动学方程可以建立为
式中,x,y,z分别表示有人机的位置坐标;θ,φ分别表示有人机的航迹俯仰角和航向角;g为重力加速度,v为有人机的飞行速度;D,W分别表示有人机的飞行阻力和自身重力;T,n,ϕ分别表示有人机的发动机推力、法向过载和滚转角,由油门杆、升降舵和副翼舵三者来控制有人机的运动。
在飞机的实际飞行中,上述三个控制量均具有实际的相关约束:推力受发动机性能的约束,法向过载受飞机设计因素的约束,滚转角根据实际的飞行情况,应当在±90°范围内,具体的约束为
2.3 无人机运动学模型
本文采用无人机的等效二阶系统模型对无人机进行控制。假设每架无人机均配置了空速、航向和航迹三个通道的自动驾驶仪,包含三个位置自由度和两个航向自由度。单个无人机的动力学模型为[21]
式中,x,y,z分别为单个无人机的三维空间位置坐标;V,χ,γ分别为无人机的空速大小、航向角和航迹倾斜角;Vc,χc,γc分别为对应的期望指令值;τv,τχ,τγ分别为无人机空速、航向、航迹控制的时间常数。设计Vmin,Vmax,nmin,nmax,γmin,γmax分别为空速大小、航向角、航迹角的最小与最大约束,重力加速度取g=9.8 m/s2,则无人机的具体约束为
3 变自主等级设计与切换
3.1 自主等级划分与控制方案
系统自主等级是系统操作能力与操作员对系统信任度的综合表征,在不同的自主等级下,操作员与集群系统进行不同程度的交互与配合,从而达到更好的控制效果和任务完成成果。在本文中,有人机在有人/无人集群中处于主导地位,负责集群决策;无人机处于次要地位,负责态势感知与有人机护卫。集群的变自主等级主要围绕集群中的无人机展开,探讨在有人机存在时无人机集群的变自主等级控制方案。本文将集群的自主等级分为四级,设计不同系统的自主等级与不同自主等级的控制方案如下:
(1)用户全手动控制
在这一自主等级,系统仅负责执行用户指令,无条件信任操作员的指令,操作员则需要输入集群的控制指令,以实现对集群的控制。操作员与系统的交互仅限于控制指令的传递。
(2)用户主导的自主控制
在这一自主等级,系统根据环境态势判断系统的自主等级,由操作员给出下一步任务目标即航路点信息,然后由系统根据用户指定的航路点信息,进行路径规划并具体制定集群控制指令,进而控制有人/无人集群。
(3)系统主导的自主控制
在这一自主等级,系统根据环境态势等因素,自主进行任务规划与决策。在这一阶段,操作员能够对集群的无人机编队队形进行设计与调整,集群则负责将控制结果报给用户,并对编队队形进行控制。
(4)系统全权限自主控制
在这一自主等级,系统自主根据任务需要做出决策与控制指令,并将结果报给用户。用户无需为系统提供任何信息。
3.2 系统工作性能评价
传感器作为无人机感知外界态势的窗口,在执行任务的过程中具有重要的作用。无人机上必须载有相关的传感器以支持对环境的探测和相关信息的获取。在量化当前态势指标时,系统首先应当判断系统本身是否能够对态势做出一个合理的、符合实际的评价。否则当传感器出现故障或是损坏,对应的态势评估就会出现不准确的情况,进而导致自主等级评估出现差错。
在本文中,所涉及的传感器主要是有人机与无人机上搭载的摄像机。因此,本文对每个传感器的系统工作性能评价为
根据假设,当前的每一架无人机仅仅采用摄像机这一传感元件,因此对摄像机的评价指标即可作为整架无人机的系统工作性能评价。当存在多个传感器时,将各个传感器的性能评价进行算数平均,可得到无人机的系统工作评价为
式中,ci为无人机每个传感器的工作性能评价。
3.3 环境威胁程度评价
有人机/无人机集群在环境中运动,环境对集群的影响不可忽略。在集群执行任务的过程中,系统通过各种传感器对环境进行探测,并预警可能的危险。当环境复杂、防空区较多时,集群面临的危险将会显著增多,对防空区域进行躲避的难度也显著增大。在无人机系统智能性不高的情况下,集群将极易受到攻击。因此对操作员介入的需求也将快速上升。环境威胁度将会是影响系统自主性的重要因素。
在本文中,无人机利用机载摄像头获取信息,进而判别当前的环境复杂度。依据摄像头所获取的信息,并为方便后续数据处理,在飞机飞行左右两侧各90°的区域内共划分六个扇形区域,每个区域占据30°的范围,如图2所示。
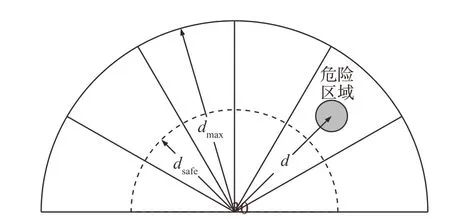
图2 无人机探测范围示意图Fig.2 Example of UAV detection range
假定wi为无人系统对某一方向扇区的敏感程度权重,通常无人机对最靠近轴线中心区域的防空区更为敏感,其敏感程度权重最大,往两边权重依序递减。六个扇形区域对应六个不同的敏感程度权重,组成敏感度权重向量参与后续的计算。为方便后续数据处理,令环境威胁程度的评价指标与其它评价指标具有相同的数量级,因此要求敏感度权重向量w满足
式中,w1,w2,w3,…,wn为向量w的n个分量。
另外,防空区与无人机的距离同样也影响着环境对集群的威胁程度,用N表示飞机对防空区的空间敏感程度,称为防空区的空间威胁度。空间威胁度越大,意味着防空区距离无人机越近,对飞机的影响越大。威胁度N是对距离的函数,危险程度与防空区和无人机的距离d成一定的线性关系,计算公式为
式中,dsafe表示飞机的安全半径,dmax表示无人机的最大探测半径。
根据威胁程度与敏感度权重,单个防空区对无人机产生的环境威胁度按下式进行计算
一般而言,单个无人机探测到的防空区越多,其认为的环境威胁程度就越大。但是需要注意,环境威胁程度并非是所有探测到防空区威胁值的简单相加。当有较多的防空区较为密集地聚集在某一个角度范围内时,其简单相加后所得的总威胁值会很大,但实际对无人机造成的影响主是由该方向上距离无人机最近的防空区引起的。因此,有必要考虑防空区的分布不同对无人机威胁程度的影响。
受生物学视线注意机制的启发,本文采用基于视角机制的环境评价方法,即无人机仅考虑六个扇形区域中对无人机威胁程度最大的防空区,将其计入无人机的环境威胁程度,忽略其余的防空区威胁值的影响,并将上述六个值进行相加得到无人机的环境威胁程度。
综上所述,对于单个飞机而言,其环境复杂程度计算公式为
式中,Oi表示第i个扇形区域中探测到的所有防空区集合。
一种无人机探测行为示意图如图3所示。
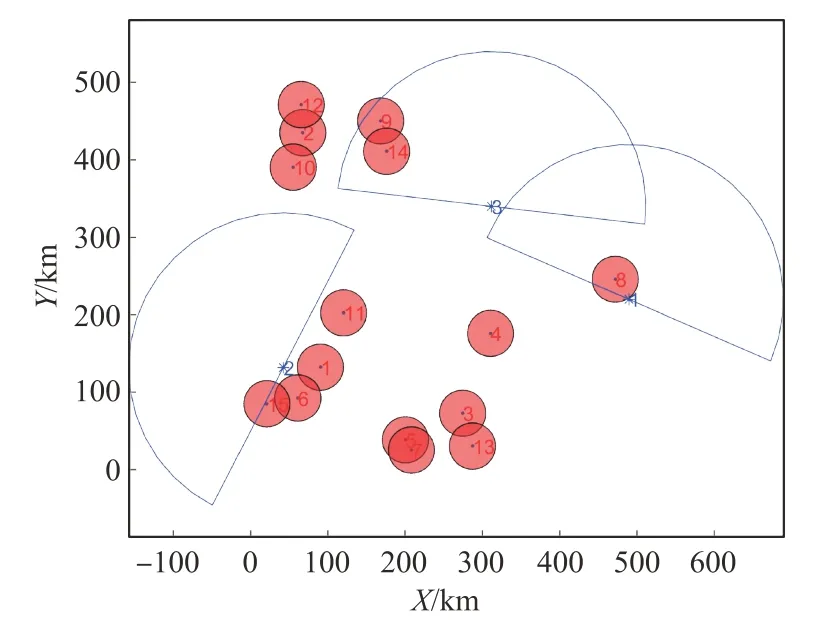
图3 无人机探测示意图Fig.3 Example of UAV detecting enemy anti-air defense
图3中每一个蓝色点代表一架无人机,其对应的蓝色半圆则表示每一架无人机所能够探测到的范围。包含在蓝色半圆中的黑色圆点则是能够被无人机探测到,进而求得的环境威胁程度。
3.4 当前态势评估
在建立了系统工作性能评价与环境威胁程度评价之后,综合前两节的态势因素,就能够建立系统态势评估向量T={ti}2。式中,{ti}2表示系统在当前态势下,针对态势指标ai的评价。本文建立了两个态势评价指标,即系统工作性能评价与环境威胁程度评价。
针对系统工作性能与环境威胁程度这两个态势指标,本文对每架无人机获取的上述评价指标进行分别相加,得到最终的集群态势评估矩阵。该矩阵将在后续的自主等级确定中起到作用。
3.5 用户模型建立与自主等级确定
有人机操作员在有人机/无人机系统中起到举足轻重的作用,其对有人机/无人机集群所面临的环境与系统威胁具有较强的解决能力。因此,操作员的相关因素在选取合适的自主等级过程中显得十分重要。针对操作员的能力、工作负荷等属性,以及不同自主等级下操作员的接入程度,给出如下定义:
定义1:用户行为能力矩阵Moa={mij}。mij指操作员在等级li下根据经验对具体行为aj的掌握能力,同一用户在不同自主等级下的行为能力不同,通常自主等级越低,用户在对应自主等级下对系统的行为能力就越强,越能改善系统当前所处的态势情况。
定义2:系统行为能力矩阵Msa={mij}。mij指操作员认为系统在自主等级li下的行为能力。同一套系统在不同自主等级下的行为能力不同,通常自主等级越高,系统的操作权限就越大,对集群所处的态势改善能力就越强。
定义3:用户精力损耗矩阵Moe={mij}。在不同的自主等级下,用户对系统的干预介入程度不同,用户所需要消耗的精力也不同,因此引入用户精力损耗矩阵来评价操作员在不同自主等级下不同的精力损耗程度。
根据以上三个矩阵,借助第3.4节中得到的态势向量,能够计算得到当前系统推荐的自主等级,计算步骤如下:
步骤1:将当前态势向量与四种自主等级下的用户行为能力矩阵和系统行为能力矩阵的对应值进行相加,得到不同等级下经过人与系统改善后的融合态势矩阵,记为Oij。
步骤2:由于融合态势矩阵中的五个态势决策属性的评价尺度不一致,为了消除不同态势属性附带的影响,首先需要对态势属性矩阵进行正规化处理,得到正规化的融合态势矩阵。
对于系统工作性能,其为收益型(越大越好)的态势属性,正规化方法可表示为
对于环境威胁程度评价,其为代价型(越小越好)的态势属性,正规化方法可表示为
步骤3:最大优化模型引入拉格朗日函数求解可得每一个态势属性的权重wj;绝对差总和越大的态势属性在决策中占有更大的比重,
为了消除权重取值方法带来的差异性,此处将单位化生成的w再进行归一化处理为
步骤4:根据态势权重与态势融合矩阵,对自主等级方案进行综合评价,求得等级总效用zi为
步骤5:利用态势权重计算得到初始的态势效用z,并根据等级总效用与用户精力损耗矩阵,求得单位精力损耗的等级效用为
步骤6:选取单位精力损耗下等级效用最大的自主等级作为推荐的自主等级。
在系统给出推荐的自主等级后,有人机操作员有两种选择:接受系统给出的自主等级,或是降低系统的自主等级并进行调整。设计系统的自主等级切换规则如图4所示。
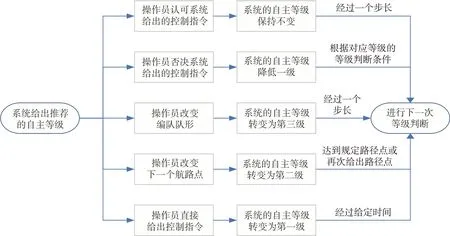
图4 系统自主等级切换规则Fig.4 Rules for switching autonomy level
4 仿真验证与分析
4.1 自主等级计算测试
随机在环境中布置防空区域并进行相应的测试,能够根据四种不同的环境与无人机所处的位置得到四种不同的建议自主等级,四种典型环境与对应的自主等级情况示例如图5所示。
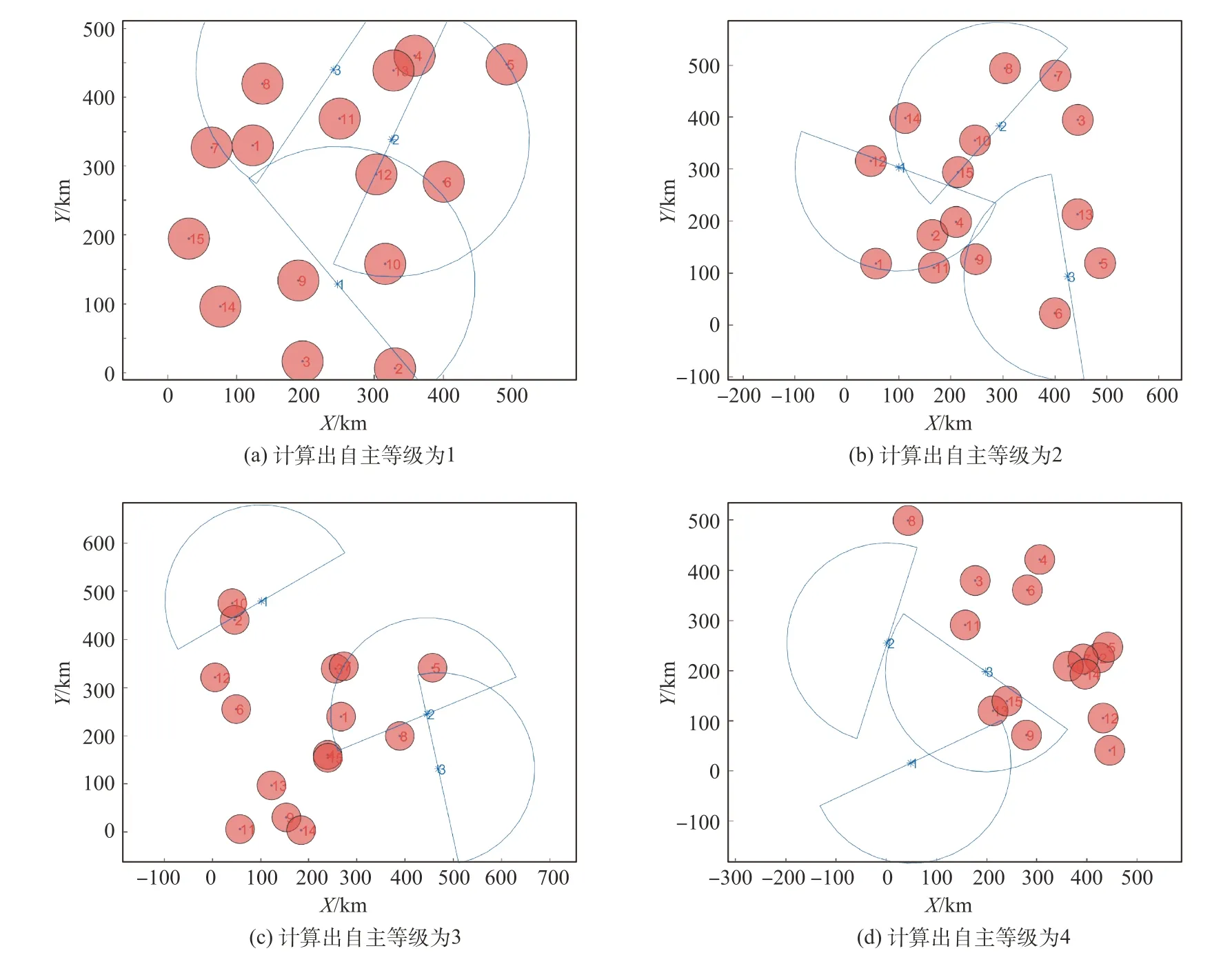
图5 不同环境下的系统推荐自主等级Fig.5 Recommend autonomy levels under different circumstances
图5中,蓝色半圆形框代表每架无人机的探测范围。由这几个场景的自主等级判断结果,可知在无人机面临较复杂的环境时,系统推荐的自主等级较低,需要操作员较多的干预;而当防空区稀疏,无人机当前面临的环境较为简单时,系统推荐的自主等级较高,操作员能够降低对系统的干预程度,进而减轻操作负担。综上所述,可以认为本文所设计的自主等级判断方法能够给出一个较为合理的推荐自主等级。
4.2 集群变自主等级控制系统设计与测试
图6为本文所设计的图形用户界面(Graphical User Interface,GUI)。该系统的任务是面向所设计的有人机/无人机集群避障打击任务场景,采用变自主等级控制方案控制有人机/无人机集群避开防空区的探测,并完成预定的打击任务。

图6 集群变自主等级控制界面Fig.6 Control interface for cluster autonomous level
为了验证本文所提出的变自主等级控制方法的有效性,在所设计的GUI 交互系统的基础上进行仿真,测试变自主等级控制的实际效果,并将测试结果与不改变自主等级的控制方法进行对比。
本文的仿真情境如图7 所示,黑点为有人机/无人机集群,黑色细线为系统预设轨迹,蓝色粗线为集群中有人机的实际飞行轨迹。由图可知,有人机/无人机集群从原点出发,期望集群能够避开环境中的所有防空区域,成功到达图的另一端点(500,500,50)以实施打击任务。对于采用变自主等级和不变自主等级的两种控制方案,均在系统中加入了编队与自主避障的相关内容。本文采用了经典的人工势场方法设计了集群的避障控制方案,实现了单个无人机对多个防空区的避障功能,使得集群对环境中的防空区域具备了一定的躲避能力,在一定距离外即可开始对防空区进行躲避。
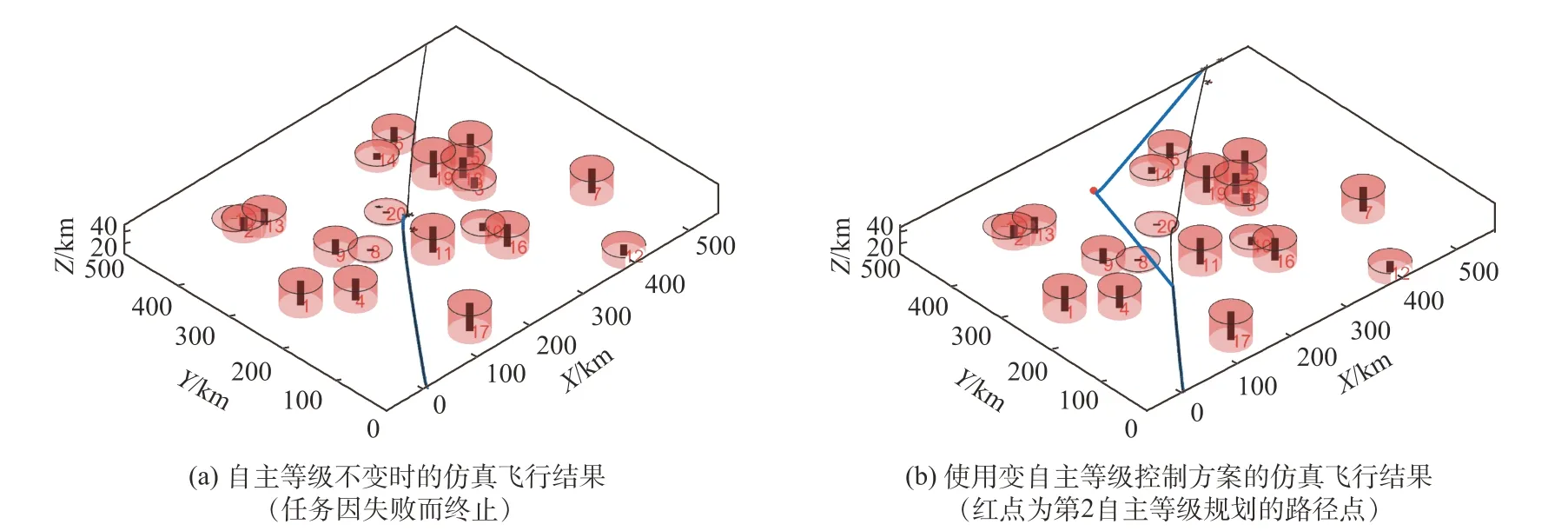
图7 仿真飞行结果Fig.7 Result of simulation flight
首先采用不改变自主等级的控制方案对集群进行控制,选取集群的自主等级固定为4,即由系统进行全部控制。在控制过程中,由于系统的能力限制,集群在第195 次迭代时出现了危险,有一架无人机接近敌方11 号防空区域。在探测到敌方防空区域后,该无人机开始进行躲避,但是由于附近防空区域较多,简单的人工势场法难以满足在复杂避障场景下的避障需求,导致该架无人机无法很好地对附近的防空区域进行规避,被防空区探测到,进而导致了整个任务的失败,仿真结果如图7(a)所示。
当集群采用本文提出的可变自主等级系统进行控制时,系统的自主等级在第125 次迭代时即出现了推荐自主等级的变化,认为当前集群遇到了一个比较复杂的环境,提示操作员应当在这一时刻设计航路点以使得集群能够避开相关的防空区域,前往危险程度比较小的区域。经过对比,可以看出相比一般的控制方案,可变自主等级控制方案提前了70 个迭代步长对可能的危险进行了预警。当操作员设计下一个航路点后,集群再次进行路径规划,使实际的集群飞向更安全的区域,并非按照最初态势不明朗时设计的路径进行飞行,最终成功避开了较为密集的防空区域并到达目标点。仿真结果如图7(b)所示。
变自主等级控制方法中的自主等级变化结果如图8所示。

图8 自主等级变化情况Fig.8 Change of Autonomy level
由图8可知,即使第二个仿真示例采用了变自主等级的控制方案,但由于系统的自主等级主要是处在第4与第3自主等级,操作员的工作负荷仍然较小,仅有数十次自主等级较低的情况也较为集中。根据所设计的自主等级切换条件,当连续出现多个自主等级为2 的情况时,除非相同的自主等级持续超过了所设定的时间,否则系统不会要求操作员做出相应的指令,即操作员在整个变自主控制仿真过程中只需进行一次航路点的设计即可实现对整个集群较为安全的控制。
对导航规划任务引入评价指标,主要包括完成时间T和人机交互时间t,其中完成时间T的单位为迭代次数,表示有人机/无人机集群从起点到终点的时间,时间越少表示集群效率越高;人机交互时间t的单位为迭代次数,表示用户在任务中的参与程度,时间越长表示用户的压力越大。
将全自主、变自主、全手动三个情境下的任务数据进行对比,得到对应指标的数值如表2所示。
由表2可知,变自主等级控制的系统取得了比较好的综合性能。在成功完成任务并且总完成时间相近的情况下,变自主等级控制的人机交互时间远远小于全自主控制的时间。在仿真中的变自主等级控制方案下,操作员的飞行控制时间仅需多次的控制指令确认操作和一次路径点设计操作,其余大部分飞行时间内均可将大部分精力用于任务规划、打击分配、与友机联络等任务,相比操作员全程手动操作模式,在完成同样任务的情况下,操作员的任务负担有了较大程度的下降。
综上所述,本文所提的变自主等级控制方案既能够有效提升控制安全性和控制效率,也能够较大程度上降低操作员的工作负荷。
5 结 论
本文对有人机和无人机的动力学模型进行建模,分析有人机/无人机飞行的态势因素,设计集群飞行变自主权限等级与转换规则,进而实现有人机/无人机集群变自主权限控制,提升任务效能并减少操作员工作负荷。本文主要进行了以下工作:
(1)对集群所处的环境进行建模,利用系统工作性能和环境威胁程度作为评价标准评估当前集群所处的态势,并利用了多属性决策的相关方法,提出了用户单位精力收益这一指标,将其作为自主等级的评价标准以确定当前的系统推荐自主等级。同时按操作员意志优先的原则设计了不同自主等级的转换规则,使集群的自主等级转换更为灵活。
(2)在所设计的自主等级的基础上,进行了软件集成与GUI 仿真界面的设计,将集群变自主等级控制方案融入所设计的控制系统中,并进行了仿真,通过模拟实际的集群飞行,证明了本文所提出的方法在有人机/无人机集群飞行中能够取得较好的飞行控制效果,且能够大幅降低操作员的工作负担,验证了本文所提出方法的优越性。
基于可变自主等级的人机交互系统尚且处在起步阶段,后续可从增加自主等级的划分、建立更加精细的态势评估模型、设计具有更好性能的控制方法等方面进行改进,提出具有更多功能的交互控制方案,以提升有人机/无人机的自主控制性能。
猜你喜欢
军事文摘(2022年13期)2022-08-27
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
军民两用技术与产品(2021年10期)2021-03-16
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
当代旅游(2019年3期)2019-09-19
中国化肥信息(2019年5期)2019-06-25
自动化学报(2017年11期)2017-04-04
党员电教与远程教育(2016年3期)2016-03-19