电子节气门开度鲁棒自适应控制器设计
2024-01-12 13:35顾友超杨君王明杰王健尹承城张文文
内燃机与动力装置 2023年6期
顾友超,杨君*,王明杰,王健,尹承城,张文文
1.山东交通学院汽车工程学院,山东济南 250357;2.山东交通学院机动车检测实验中心,山东济南 250100;3.山东地矿新能源有限公司,山东济南 250013;4.山东女子学院数据科学与计算机学院,山东济南 250300
0 引言
电子节气门开度的精确控制与发动机的燃油经济性和动力性密切相关,近年来关于电子节气门开度控制的研究取得一定成果。文献[1]为了抑制电子节气门工作中高阶时变形式的扰动,提出了基于高阶干扰观测器的控制方法,通过试验验证了该方法可有效抑制节气门阀工作时的各种扰动。文献[2]针对电子节气门物理参数可能发生变化的问题,设计了一种自适应反步控制器,并验证了该控制器在多种工况下均具备良好的抗干扰和自适应能力。文献[3]根据电子节气门的能控能观状态方程,提出了基于干扰抑制的滑模变结构控制算法,并验证了该方法在输入阶跃、正弦信号时可以有效保证系统的稳定性。文献[4]在节气门的开度控制中应用幂次指数趋近律变结构算法,结果表明该方法不仅能保证电子节气门开度控制的精度,还能在参数漂变和外部扰动的情况下保持良好的鲁棒性。文献[5]针对车辆起步时油门迟滞问题,在油门信号放大器中引入粒子群优化的神经网络比例积分微分(proportion integration differentiation,PID)控制算法,仿真结果表明该控制方法使电子节气门动态性能得到有效提升。文献[6]针对电子节气门模型的不确定性和扰动问题,设计了串级结构的模型预测控制-抗扰PID控制器,并通过试验证明了该控制器简单实用,在模型和理想信号发生变化时均具有良好的伺服和抗干扰能力。文献[7]对传统的滑模控制方法进行改进,将滑模面引入幂指数项,对控制律引入低通滤波,通过仿真表明改进的控制方法相较于传统滑模控制的优越性。文献[8]分析节气门体的转矩传递过程,建立了数学方程,进一步推导状态空间模型,该模型有利于电子节气门的精确控制。文献[9]改进常规混沌优化算法,提出了多元回归混合优化算法,通过试验证明该方法在参数辨识上优于传统混沌优化算法。文献[10]针对节气门开度控制问题,利用非对称障碍李亚普诺夫函数设计了自适应控制器,通过仿真表明该控制算法优于二次李亚普诺夫函数控制方法。文献[11]针对电子节气门系统的动态不确定问题,提出了一种新的基于极限学习机的鲁棒控制方法,通过仿真表明该控制方法可以有效收敛误差,具有良好的跟踪性能。文献[12]为解决电子节气门系统中的强非线和参数不确定等问题,设计了自适应滑模控制器,仿真结果表明:在电压信号输入不超过饱和约束的前提下,控制器具有良好性能。
电子节气门直流电机在工作时产生电感,文献[13-14]分析结果表明:电感影响电机的电流和转矩输出等,从而影响节气门的开度控制。由于电感较小,很多学者在建立电子节气门动态方程时忽略了电感[15]。本文中将电感产生的影响等效为未知的常值电压,将负载转矩扰动的影响等效为白噪声,基于李亚普诺夫函数和鲁棒自适应控制策略,设计电子节气门开度,并结合数值仿真进行验证。
1 电子节气门动态方程
电子节气门驱动系统示意图如图1所示,该系统包括电子控制单元、直流电机、齿轮组等部件。电子控制单元采集加速踏板位置信号和节气门实际开度信号,结合车速、发动机工作状态等因素计算节气门目标开度,并将目标开度转换为脉宽调制电信号以驱动直流电机产生转矩。直流电机克服摩擦力和回位弹簧弹力,通过齿轮组驱动节气门阀片,使节气门达到目标开度。

图1 电子节气门驱动系统示意图
根据电机的电压方程、弹簧和齿轮的转矩方程,电子节气门动态方程[16]为:
(1)
式中:θ为节气门实际开度,ω为节气门角速度,θ、ω通过节气门位置传感器测量得出;J为转动惯量;U为直流电机控制电压;U′为电感产生的影响,将其等效为未知常值电压;Kt为电机转矩系数;n为齿轮传动比;R为电阻;B为黏性阻尼系数;Ke为反电动势常数;Fc为库仑摩擦系数;Ks为弹簧弹性系数;θ0为节气门初始开度;TLH为弹簧预紧转矩;J、n、R、B、Kt、θ0、Ke、Ks、TLH为节气门固有参数;T0为标称负载转矩;τ为负载转矩扰动,将其等效为白噪声。本文中所选取的电子节气门参数如表1所示。

表1 电子节气门参数
2 控制器设计与仿真验证
2.1 自适应控制器设计
基于李亚普诺夫函数设计节气门开度鲁棒自适应控制器,为使控制器设计步骤简洁,不同时间t下,控制器相关函数
(2)
定义节气门角度的跟踪误差
e1=θ-θ*,
(3)
式中θ*为节气门目标开度。
关于节气门角度跟踪误差的李亚普诺夫函数
V1=e12/2,
(4)
对式(4)求导可得
(5)
设计节气门目标角速度
(6)
式中:c1为节气门角度控制参数,c1>0。
将式(6)代入式(5)可得
(7)
定义节气门角速度跟踪误差
e2=ω-ω*。
(8)
关于节气门角速度跟踪误差的李亚普诺夫函数
(9)

基于式(1)~(8),对式(9)求导:
(10)
式中:Γ为扰动抑制水平,Γ>0。
根据式(10),设计直流电机控制电压
(11)
式中:c2为转速控制参数,c2>0。
设计鲁棒控制器的自适应律
(12)
由式(10)~(12)可得
(13)
对式(13)积分可得
(14)
对式(14)简化可得
根据以上分析可知,本文中提出的控制策略可将电感和负载转矩的扰动对电子节气门开度的影响抑制在Γ以下。ω*、θ*、c1、c2、Γ、γ可根据节气门控制性能的要求设定。
2.2 仿真分析
基于仿真软件和式(1)(11)(12)搭建电子节气门开度控制数值仿真模型,如图2所示。图中1/s代表Simulink的积分器,即表示对变量的一次积分,1/s2为二次积分。

图2 电子节气门开度控制数值仿真模型简图
由图2可知:转速跟踪误差为自适应律的输入量,自适应律和开度跟踪误差为直流电机控制电压的输入量,直流电机控制电压为电子节气门动态方程的输入量,节气门开度和转速由动态方程计算得出。
在电子节气门控制仿真系统中依次输入常数信号、阶跃信号、正弦信号,分别模拟汽车在良好路面上匀速行驶、急加速、连续变速3种工况,验证控制策略的有效性。匀速行驶和急加速工况设定控制器参数为:c1=200,c2=200,Γ=0.5,γ=10;变速工况设定控制器参数为:c1=500,c2=500,Γ=0.5,γ=20。3种工况的节气门开度目标与仿真结果对比及跟踪误差分别如图3、4、5所示。

a)节气门开度 b)跟踪误差图3 匀速行驶工况节气门开度目标与仿真结果对比及跟踪误差
由图3可知:匀速行驶工况,节气门开度能快速、准确地跟踪目标开度,系统达到稳态后跟踪误差基本维持在0°附近。
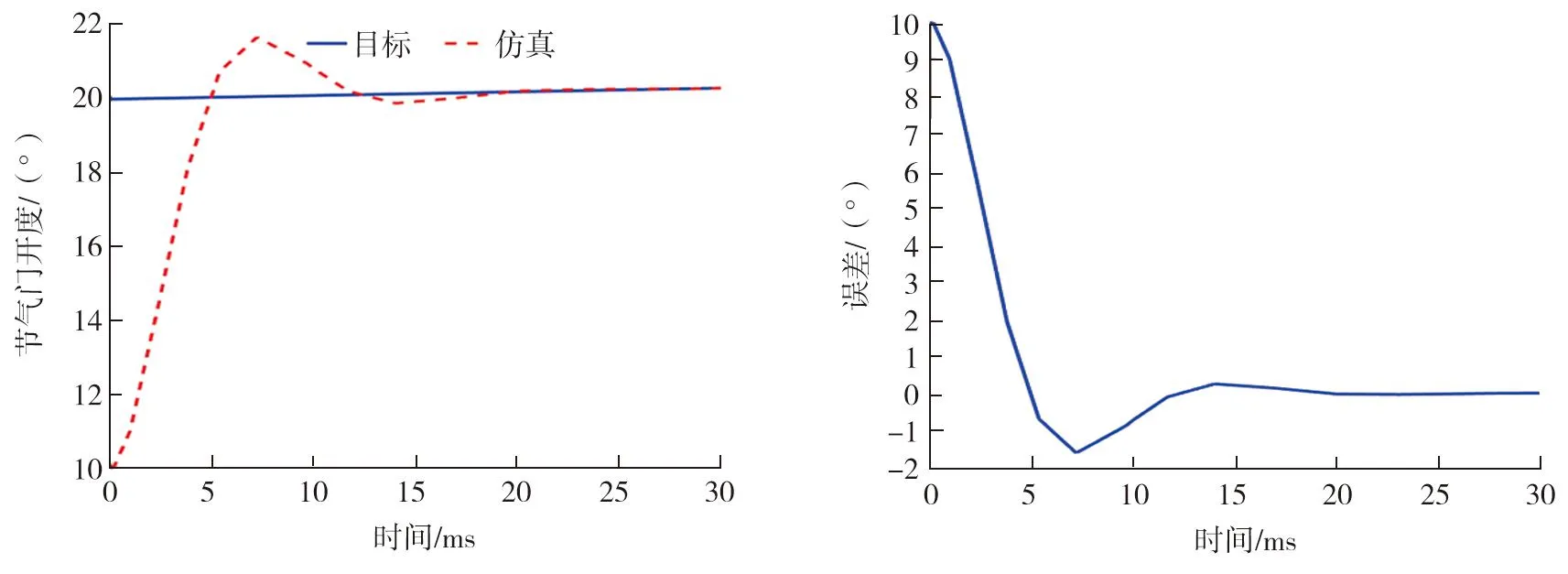
由图4可知:急加速工况,节气门开度能快速、准确地跟踪到目标信号,阶跃工况跳变时刻,跟踪误差较大,其余时刻跟踪误差均维持在0°附近。
由图5可知:连续变速工况,节气门开度能较快达到稳态,稳态后的跟踪误差基本维持在0°附近。
2.3 有效性验证
对于连续变速工况,将达到稳态的节气门开度平均分成4组,并计算每组的均方差(记为δ1、δ2、δ3、δ4),利用无向图进行分析,无向图中每条边代表2点之间的连通性,每条边的权重代表2组均方差的相对误差,如果权重小于10%,则2点之间具备连通性,数据有效,否则数据无效。节气门开度仿真的均方差无向图如图6所示。

图6 节气门开度仿真的均方差无向图
由图6可知:4组节气门开度仿真的均方差分别为0.000 012 77、0.000 012 87、0.000 012 70、0.000 012 83;每组数据均方差的相对误差均小于10%,此无向图为连通图,表明采用该模型计算连续变速工况的仿真数据有效。
不同型号的节气门固有参数不同,选取文献[17]中的节气门参数,输入正弦信号模拟连续变速工况进行仿真验证,节气门开度目标与仿真结果对比及跟踪误差如图7所示。
a)节气门开度 b)跟踪误差图7 某节气门开度目标与仿真结果对比及跟踪误差
由图7可知:本文设计的鲁棒自适应控制器同样适用于文献[17]中的电子节气门。
3 结论
本文中考虑电感和负载转矩扰动的影响,建立电子节气门动态模型,利用李亚普诺夫函数设计电子节气门开度鲁棒自适应控制器,可使电子节气门在常值、阶跃和正弦3种输入信号下快速、精确地跟踪目标开度,且节气门系统达到稳态后节气门开度跟踪误差基本维持在0°附近,该控制策略可广泛应用于发动机节气门开度控制。
猜你喜欢
大电机技术(2022年5期)2022-11-17
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年19期)2018-04-28
电子制作(2017年1期)2017-05-17
汽车维修与保养(2015年1期)2015-04-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01