混合交通流作用下大跨径桥梁车辆荷载效应分析
2024-01-12 13:11张太科金泽人
同济大学学报(自然科学版) 2023年12期
魏 祎, 张太科, 阮 欣, 金泽人
(1.同济大学 土木工程学院,上海 200092;2.广东湾区交通建设投资有限公司,广东 广州 511462)
大跨径缆索承重桥梁汽车荷载效应水平和特征与规范值存在差别。Enright 等[1]基于美国11 地的WIM(weigh-in-motion)数据生成了拥堵车流,分析了某斜拉桥和悬索桥的效应水平,结果表明,欧洲的EC LM1(Eurocode load model 1)模型对于大跨径桥梁是偏安全的,美国的ASCE(American Society of Civil Engineers)模 型 和 AASHTO(American Association of State Highway and Transportation Officials)HL-93模型则显著低估了一些地点的车辆荷载水平。韩大章等[2]基于计重收费数据形成润扬长江大桥的动态荷载流,效应极值外推结果表明该桥在自由交通和拥堵交通下的效应极值均低于规范值,但吊杆轴力极值超越规范值,增加了失效风险。卡车(货车)占比对结构效应极值的影响显著[3]。韩万水等[4]基于实测交通荷载数据计算了特重车交通荷载作用下桥梁的空间动力响应,结果表明超限工况主要为单辆特重车过桥工况,最大超限率达到15%。可见,研究大跨径车辆荷载问题必须考虑卡车这一关键车型。
卡车列队(Truck Platooning,又称列队行驶、列队跟驰、编队驾驶等)是自动驾驶汽车的应用场景之一,前后通行的卡车通过通信手段共享信息并进行自动控制,以近距离编队形式行驶,从而提升运输效率和节约燃料。已有研究表明卡车列队高效运输和节约燃料的优势必须在小间距行驶时才能体现,行车间距为15m 时的车辆空气阻力系数仅为行车间距为210m 时的30%,随着行车间距的增大,车辆空气阻力系数增大[5]。卡车列队的车辆组成和行驶要求使其具有明显的荷载集度大的特点,由此可能会导致桥梁结构产生超出设计能力的内力,并造成损伤[6-7]。相比中小跨径桥梁,大跨径桥梁可以容纳更长的车队以及更多的车队数,卡车列队场景更为复杂。卡车列队与目前桥梁上行驶的卡车或卡车队并不相同,其在具有重载特点的同时,还会呈现更为有组织的行驶路线和空间分布,对于卡车列队作用下大跨径桥梁车辆荷载相关问题的探讨目前鲜见,其对结构性能的影响还不明确,需要进一步开展研究。
在前述研究现状的基础上,本文重点关注大跨径悬索桥在自动驾驶卡车列队及其与普通交通流形成的混合交通流作用下的效应问题。以一座大跨径悬索桥为背景工程,建立混合交通流车辆荷载模型和模拟方法,分析混合交通流对桥梁车辆荷载效应的影响,为类似工程的设计与管理提供参考。
1 大跨径桥梁交通与荷载模式
1.1 卡车列队模拟参数
卡车列队主要的模拟参数包括跟车间距、卡车类型、卡车数量等。根据国内外卡车列队试验和研究文献,跟车间距基本设置为10m左右,这一设置的前提是车队必须采用自动控制,使队内卡车可以同时加速、减速,从而消除反应时间对应的较大跟车间距。卡车类型与所在国家或地区密切相关,一般为5轴卡车,车长为10~13m。与桥梁相关的研究中,大部分研究考虑了2车、3车、4车、5车组成的车队,当背景桥梁为中小跨径时,基本仅可布置一队卡车。Thulaseedharan和Yarnold[8]选取了9m和12m 2种跟车间距,考虑2车列队和3车列队,选用了5种设计或评估手册中规定的卡车,形成24 种卡车列队情况。评估结果表明桥梁荷载水平随跨径增长而上升,因为可以容纳的车队数随跨径增长而增加。Tohme 和Yarnold[9]选用了FDOT C5卡车,考虑了2车、3车和4车列队以及6m和12m 2种跟车间距进行卡车列队模拟,研究结果表明,采用AASHTO HL93车辆荷载进行设计的桥梁在卡车列队作用下性能良好。Jo等[10]考虑了队内卡车数、跟车间距、队与队间距、卡车渗透率4个参数,生成了160种卡车列队场景,分析了存在卡车列队和不存在卡车列队相应的路段通行能力。对于大跨径桥梁,其可以容纳更多的组队卡车数,桥面上的车辆时空分布更复杂,产生的荷载效应可能更不利,需要进一步分析研究。
1.2 混合交通流
在车路联网的环境下,自动驾驶汽车可以通过车载控制系统和车间(vehicle to vehicle, V2V)通信技术与前车和周围环境进行实时信息共享和交流,从车辆层面优化道路运行效果,提升交通运营质量,减少交通堵塞。以人类驾驶车辆和自动驾驶车辆组成的混合交通流将逐渐成为未来主要的交通形式。相关研究表明,通过降低自动驾驶车辆系统的反应时间,可大幅提高道路通行能力,最高可达2倍。道路上自动驾驶车辆的比例对道路通行能力和交通拥堵有显著影响。当自动驾驶车辆的比例达到80%时,通行能力可达到全手动驾驶交通流的2倍,交通拥堵可以降低50%[11]。另一方面,当混合交通流中手动驾驶车辆前车为协同自适应巡航控制(cooperative adaptive cruise control,CACC)自动驾驶车辆时,驾驶员会在心理作用下造成车间距增大。驾驶员对CACC车辆的安全顾虑越大,手动驾驶车辆安全距离增加程度越大。交通流车间距过大,前后车辆的速度调节同步率低,从而使交通流流量、平均速度、截止密度下降[12]。现有研究表明,自动驾驶车辆参与的混合交通流与目前常见的交通流之间在通行能力、行驶逻辑、驾驶员心理等方面存在较为明显的特性差异,其作用下的桥梁结构车辆荷载效应还需要深入研究。
2卡车列队荷载模型与混合交通流模拟
2.1 背景工程和效应选取
针对一座主跨2 180m 的单跨双层钢桁地锚式悬索桥开展混合交通流作用下的车辆荷载效应分析,桥梁结构整体布置如图1 所示。桥面宽42.6m,2层桥面均采用双向八车道标准设计,锚碇采用重力式锚碇。进行效应选取时,主要基于悬索桥的主要受力构件及其受力特性,同时考虑与车辆荷载作用存在较强关联,最终选取主梁跨中位移、鞍座处主缆轴力、四分点吊杆轴力和跨中吊杆轴力4 个效应作为后续分析的对象。

图1 桥梁结构三维模型Fig.1 3D model of overall bridge structure
在ANSYS 软件中建立结构三维有限元模型,共采用3种单元模拟结构构件,其中,主缆和吊杆采用LINK10 单元模拟,主梁、主塔采用BEAM4 单元模拟,桥面采用SHELL63单元模拟。构件连接与约束按照结构设计方案施加。在桥面沿纵桥向逐点施加单位力计算得到效应影响线,提取的关键效应影响线如图2 所示。

图2 关键效应影响线Fig.2 Key effect influence lines
由图2 可知,对于大跨径悬索桥,不同效应的影响线形状和沿桥梁跨径方向的长度(简称“影响线范围”)存在明显差异。图2 a和图2 b影响线变化较为平缓且全跨均有不可忽略的量值,影响线范围与桥梁跨径可视为相等。图2 c 和图2 d 则明显不同,影响线变化陡峭且仅在关注点附近有限范围内存在明显量值尖峰,其他区域影响线量值基本为零,其影响线范围不超过300m,显著小于桥梁跨径。基于此可以推知,卡车列队荷载作用在不同影响线上时,产生的影响会有差异。因此,根据影响线形状和量值分布将效应分为2类,一类是整体效应,如跨中位移和主缆轴力;另一类是区段效应,如吊杆轴力。
2.2 卡车列队荷载模型
在国内外现有研究中,卡车列队模拟时主要涉及3 类关键参数:① 单个车队参数,如队内跟车间距、队内卡车数;② 队与队关系参数,如队与队间距;③ 卡车自身参数,如卡车尺寸(长、宽、轴数、重量)、行驶速度。除理论研究外,国内外还通过开展卡车列队实际测试获取关于列队间距、行驶速度以及节能效果等方面的结论,总结如表1所示。

表1 国内外卡车列队实际测试项目及主要结论Tab.1 Test project and main conclusions of truck platooning at home and abroad
基于上述卡车列队关键参数调研结果,构建以队内卡车数、队内跟车间距、队与队间距、卡车实际行驶速度、卡车尺寸与重量为参数的卡车列队荷载模型(图3)。

图3 卡车列队荷载模型Fig.3 Load model of truck platooning
队内卡车数主要由桥梁结构和控制技术决定,目前大多选取2~5辆。本研究选用的悬索桥加载长度远大于中小跨径桥梁,需要考虑更多的队内卡车数,因此取5辆、10辆和15辆3种队内卡车数。研究表明,卡车列队时的队内跟车间距设置在6~15m较为可行,距离过近无法保证安全行驶,距离过远无法有效减小风阻和节约燃料,因此研究取6m、10m 和15m 这3 种队内跟车间距。车队与车队间的距离主要与卡车的行驶速度有关,从更符合桥梁实际运行情况的角度,暂不考虑较小的间距取值,仅考虑200m 一种队与队间距。根据目前已完成的卡车列队测试,卡车的实际行驶速度一般在60~100km·h-1,后续模拟时取80km·h-1作为行驶速度。列队卡车目前多采用5 轴卡车,卡车的详细尺寸和技术指标则与各国或地区规定密切相关。选取《公路桥涵设计通用规范》(JTG D60—2015)[16]中规定的车辆荷载。
综合上述取值依据,构建的卡车列队荷载模型及其参数取值如表2 所示。

表2 卡车列队模拟参数取值Tab.2 Parameter value of truck platooning simulation
基于上述模拟参数可以生成用于效应分析的卡车列队布置,相应的车队长度和车队总重如表3 所示。按照表3 布置卡车列队到相应场景中,可以得到对应的结构效应。

表3 卡车列队布置Tab.3 Arrangement of truck platooning
2.3 混合交通流模拟
2.3.1 元胞自动机方法
目前主要的桥梁随机车流模拟方法包括随机交通流蒙特卡洛模拟方法(Monte Carlo, MC)、微观交通智能驾驶员模型(IDM)、微观交通元胞自动机方法(Cellular Automaton)等。引入元胞自动机模型开展桥梁车辆荷载模拟是较新的研究方向[17-19],但经典的元胞自动机方法在荷载分布精度和车流演化描述方面均存在局限,因此多轴单元胞自动机(Multiaxle Single-cell Cellular Automaton, MSCA)模型被提出[20],从物理环境层面优化元胞自动机,实现车辆跟车、变道的行驶过程模拟和参数化加载车流的演化过程模拟。本文的混合交通流模拟基于多轴单元胞自动机模型实现,根据模拟需求确定元胞空间、元胞状态、邻域和状态更新规则4个部分。
(1)元胞空间。元胞空间是一个记录模拟路段基本物理信息、元胞网格划分、演化时间间隔等参数的集合,可以表示为
式中:L为元胞空间;l为交通流模拟长度;n为车道数量;s为元胞形状;r为道路信息;Δl为元胞网格划分尺度;Δt为演化时间间隔。
(2)元胞状态。元胞状态包括了车辆状态、运动参数和荷载信息,可以表示为
式中:∑为元胞状态集合;参数f表示元胞是否被车头占据,参数q表示车头在元胞中的具体位置,车辆状态由参数f和q决定;参数集M代表运动参数;参数集W代表荷载信息。
(3)邻域。在交通环境下,邻域是指对某一车辆的交通行为有影响的前后元胞的集合。对于单车道元胞空间,邻域一般定义为前车和本车在内的区间;对于多车道元胞空间,邻域则定义为相邻两侧车道中前后有车元胞范围以及本车道中前车和本车在内的区间。
(4)更新规则。更新规则是根据元胞当前状态及其邻域状况确定下一时刻该元胞状态的动力学函数,即一个状态转移函数,对于交通流模拟主要规则包括跟驰和换道。其一般形式可以表示为
式中:σi(t+1)和σi(t)为t+1 和t时刻元胞i的状态;σi+1(t),…,σi+N(t)为t时刻元胞i的邻域元胞状态,δj为作用于元胞i的第j个更新规则。
2.3.2 混合交通流实现
混合交通流主要考虑2 类,一是在桥面上设置卡车列队专用车道,卡车列队和普通车辆在各自专用车道内行驶,实现主梁断面全层面的混合;二是允许在卡车列队车道中行驶普通车辆,实现车道内的混合。基于随机车流加载的大跨径桥梁车辆荷载效应分析,可以反映桥面真实车辆荷载分布以及交通流的动态演变过程,因此,在进行混合交通流模拟时,采用元胞自动机方法模拟生成3种单车道车流,即全卡车列队车流、全普通车辆车流和“卡车列队+普通车辆”车流(简称“混合车流”),如图4 所示。

图4 混合交通流单车道车流Fig.4 Single lane traffic flow of mixed traffic flow
收集了国内8个地点的动态称重数据和收费站数据约3 000 万条。全普通车辆车流的模拟可以基于实测交通数据通过前述元胞自动机方法实现,元胞自动机的参数设置细节可参考相关研究[20]。混合车流模拟需要在原有模拟设置中补充体现卡车列队布置的参数,笔者在模拟时添加了与表3 中卡车列队布置对应的车型,将一种卡车列队布置视为一种车型,并通过设置其车道选择参数和车道内车型占比参数实现全卡车列队车流和混合车流的模拟。在生成混合车流时,元胞自动机的流量参数基于桥梁交通需求预测进行设置,且考虑了车队内的卡车数量。对于交通堵塞,通过元胞自动机在交通量较大情况下自发涌现拥堵场景的方式进行隐式考虑。车流模拟及其后续应用的主要环节如图5所示。

图5 大跨径桥梁混合交通流模拟及应用流程Fig.5 Flowchart of mixed traffic flow simulation and application for long-span bridges
综合前述方法,建立一种更为通用的交通流模拟方法,该方法既可以模拟混合车流,也可以模拟普通车流或其他类型的同质车流。对生成的3种单车道车流进行交通特性数据统计,如表4 所示。
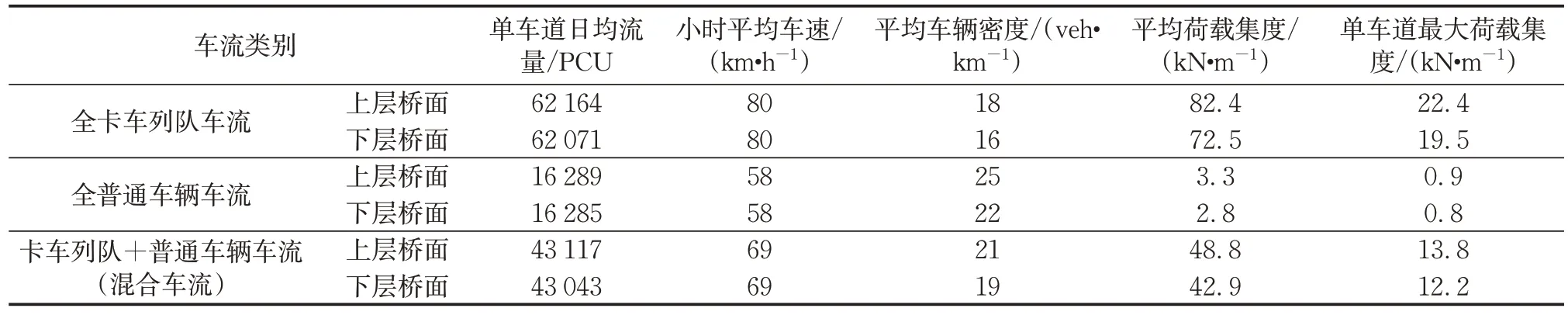
表4 混合车流信息统计Tab.4 Statistics of mixed traffic flow
由表4 可知,全卡车列队车流的平均荷载集度最大,混合车流次之,全普通车辆车流最小,表明混合交通流作用下桥梁效应水平呈现较显著提升。需要说明的是,全卡车列队车流实际上代表了非常极端的密集大荷载情况,在实际运行中通过采取车道设置、流量控制等桥梁管理手段可以保证桥面车辆总数稳定,车辆荷载效应不超限。基于生成的3 种单车道车流和背景工程桥梁车道布置,考虑4 种代表性运营场景用于效应分析,具体的车道车流设置如表5 所示。表5所示为半幅桥面车道设置情况,另外半幅桥面相同。

表5 代表性运营场景车道车流设置Tab.5 Arrangement of traffic flow for each lane inrepresentative operation scenarios
3 车辆荷载效应分析
3.1 车辆荷载效应组合
将前述模拟生成的3种随机车流进行影响线加载,可以得到对应的单车道效应。
式中:E为通过影响线加载得到的车流作用下的单车道效应,用ETP、ENT和EMT分别表示全卡车列队车流、全普通车辆车流和“卡车列队+普通车辆”车流作用下的单车道效应;pm为随机车流中的移动荷载集中力,N;ym为集中力pm作用位置处的影响线竖标;m为移动荷载集中力数量,m=1,2,...,n,n为采样时桥面上的移动荷载集中力总数。
将单车道效应按照前述运营场景进行组合,得到混合交通流作用下的总效应。背景工程桥梁上下层桥面各布置8 条车道,偏保守认为上下层荷载及其效应不相关,即总效应是上下层效应的代数和。
式中:Etotal为结构断面总效应值;NTP为全卡车列队车流作用车道数;NNT为全普通车辆车流作用车道数;NMT为“卡车列队+普通车辆”车流作用车道数。
用于加载计算的随机车流模拟时长为14d,考虑到模拟时长显著小于桥梁设计基准期,需要对荷载效应最大值进行极值外推以考虑设计基准期内的荷载变异性和可能出现的极端荷载。篇幅所限,以场景4 为例展示各效应的最大值样本分布,如图6 所示,其中k、σ和μ分别为广义极值分布(generalized extreme value distribution, GEV)的形状参数、尺度参数和位置参数。
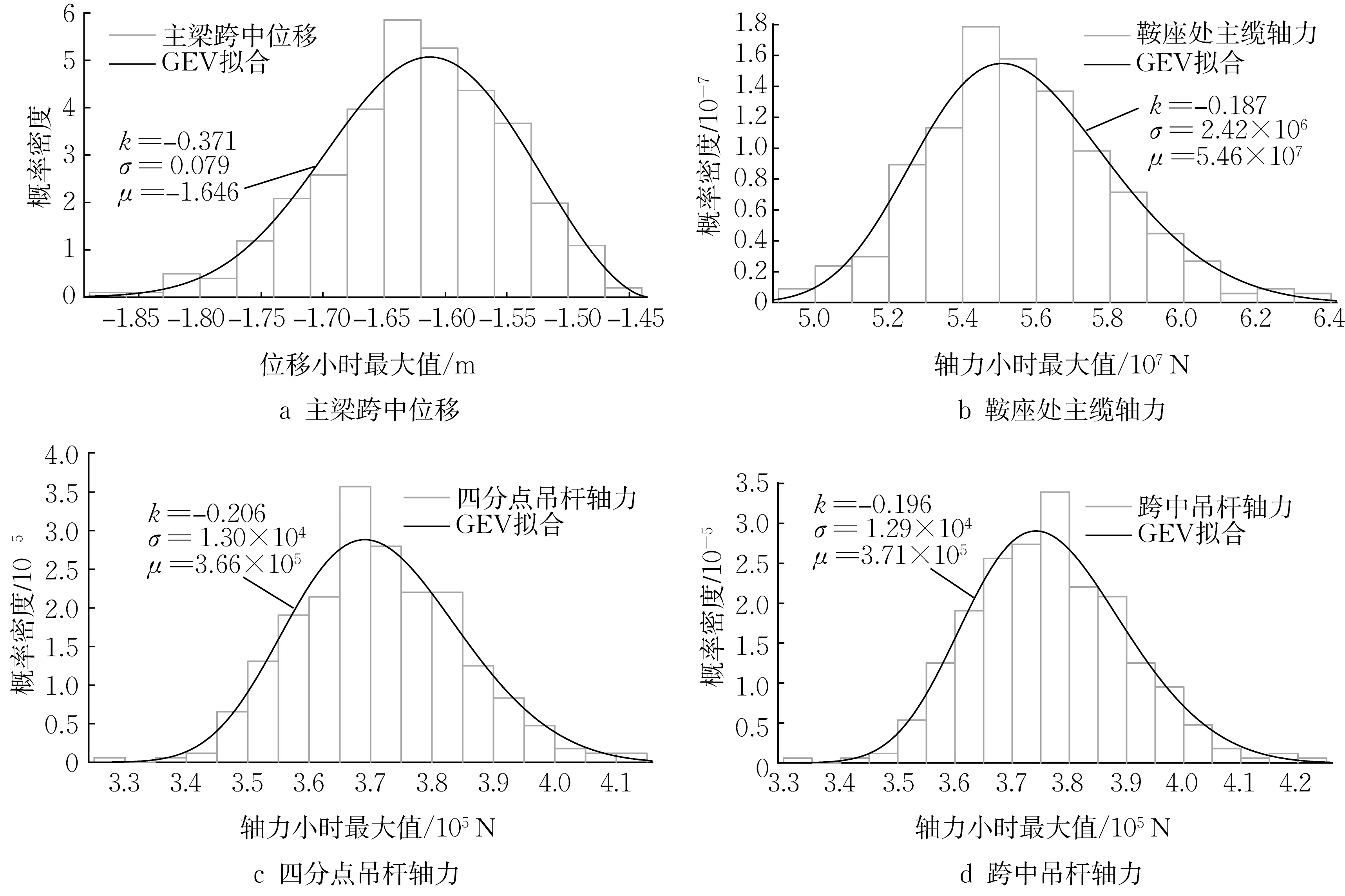
图6 场景4的效应最大值样本分布Fig.6 Distribution of effect maximum samples (Scenario 4)
采用基于经典极值理论的最大值外推方法。在确定最大值样本区间长度时,综合考虑认为以小时作为区间长度较能兼顾外推结果稳定性和样本数据利用率。以广义极值分布作为小时区间最大值样本的最优拟合分布得到评估周期下的特征值,如式(6):
式中:EEV为经过极值外推的某场景下车辆荷载效应值;x为荷载效应的评估特征值;F-1(x)为荷载效应最大值样本GEV拟合的反函数;T为荷载效应的重现期,年。
3.2 整体效应分析结果
按照确定的4种代表性运营场景进行车流加载和效应统计,绘制各场景对应的结构整体效应极值(EEV)与规范值(ECODE)之比的柱状图,如图7 所示。由图可知,结构在混合交通流作用下各场景的整体效应基本在规范值的35%~80%,4种混合交通流场景的整体效应值均大于全普通车流加载值。可见,混合交通流作用下结构的效应水平较全普通车流有显著提升,但现行规范对于混合交通流仍具有良好的适用性,可以保证结构在未来交通情景下的安全服役。

图7 各场景下结构整体效应水平Fig.7 Structural global effect in each scenario
3.3 区段效应分析结果
选取四分点吊杆轴力和跨中吊杆轴力作为区段效应代表进行计算分析。各场景下的效应极值与规范值之比如图8 所示。由图可知,混合交通流作用下的区段效应基本在规范值的40%~80%,4种混合交通流场景的区段效应值均大于全普通车流加载值。

图8 各场景下结构区段效应水平Fig.8 Structural partial effect in each scenario
对比整体效应和区段效应可知,整体效应主要受均布荷载影响,区段效应主要受集中力影响,因此对于卡车队列这类在车队范围内分布较为均匀的荷载,作用在桥上后,影响线范围广的整体效应其效应值较普通车辆车流作用下的效应值增长更为显著。但总体上,规范的汽车荷载模型已经足够保守,现行规范对于混合交通情景下结构的整体效应和区段效应均可提供较好的安全保障,结构可以安全服役。
4 混合交通流对大跨径桥梁荷载效应的影响
基于车辆荷载效应分析结果,从车流、场景以及荷载变异性3个方面讨论混合交通流对大跨径桥梁荷载效应的影响。
(1)车流方面。将全卡车列队车流、全普通车辆车流和混合车流的单车道效应极值与规范值进行比较,如图9 所示。全卡车列队车流和混合车流的单车道效应极值均超过规范值,而全普通车辆车流的单车道效应值仅为规范值的20%~40%,表明混合交通流会提升结构效应水平,且整体效应的增幅更加明显。
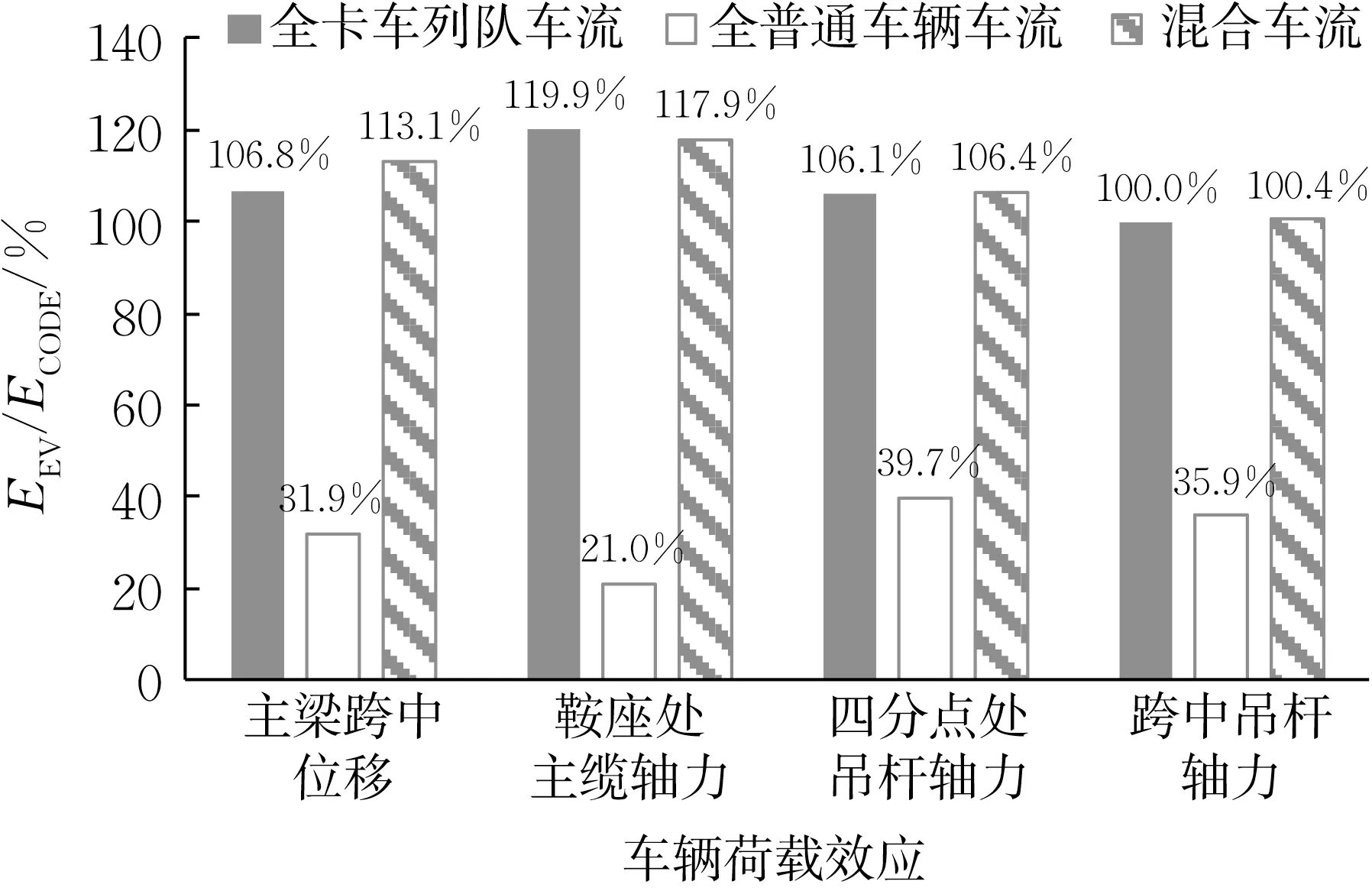
图9 不同车流作用下的单车道效应水平对比Fig.9 Comparison of single lane effects under the action of different traffic flows
(2)场景方面。由图7 和图8 各场景下的效应极值与规范值之比可以看出,结构车辆荷载效应由场景1到场景4逐渐增大,表明无论是全卡车列队车道还是混合车道,其数量越多,结构的车辆荷载效应值越大。但是从场景1到场景4,整体效应与规范的比值增加了约41%,区段效应增加了约36%,整体效应增幅更大,且与参照场景的差异更显著,说明整体效应对混合交通荷载更为敏感。
(3)荷载变异性方面。定义车辆荷载效应极值较最大值的增长率为车辆荷载效应增长率R,各场景下的效应增长率变化情况如图10 所示。总体来看,从场景1 到场景4 折线逐渐收敛,即效应增长率呈减小趋势。当全普通车辆车道数不大于8 时,效应增长率将小于10%,表明卡车列队这类具有严格行驶规则的交通模式在交通流中的占比增加会使得荷载变异性降低,随评估周期增长相应的荷载效应不会显著增加,更有利于桥梁运营期间的管理。
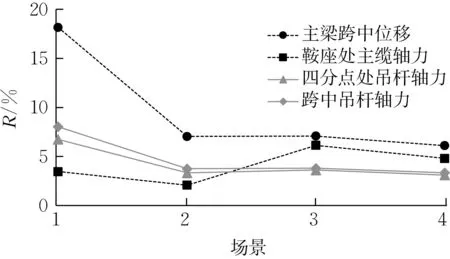
图10 各场景下车辆荷载效应增长率变化趋势Fig.10 Variation of growth rate of vehicle load effect in each scenario
5 结论
着眼未来交通模式发展趋势和桥梁车辆荷载变化,研究了大跨径悬索桥在混合交通流作用下的效应问题。研究得到的主要结论包括:
(1)混合交通流模拟可以基于元胞自动机方法,通过添加卡车列队车型和普通车辆车型,并设置其车道选择参数和车道内车型占比参数实现。
(2)混合交通流作用下的桥梁整体效应约为规范值的35%~80%,区段效应约为规范值的40%~80%。结构效应水平较全普通车流作用下有显著提升,但按现行规范设计仍可以保证结构的安全服役。
(3)在混合交通流中,以卡车列队为代表的具有严格行驶规则的交通模式占比增加会降低车辆荷载变异性,设计基准期内车辆荷载效应不会有显著增加,更有利于桥梁管理。
作者贡献声明:
魏 祎:车流仿真与效应计算,数据处理与分析,论文写作与修改。
张太科:研究问题提出与思路讨论,资料和数据收集,论文修改。
阮 欣:方法构思,研究指导,论文修改与审定。
金泽人:车流仿真,论文修改。
猜你喜欢
工会博览(2022年33期)2023-01-12
——史蒂芬·哈特克《列队》的音高组织方法之一
北方音乐(2020年24期)2021-01-27
红豆(2019年6期)2019-05-28
扬子江(2019年3期)2019-05-24
中国交通信息化(2019年6期)2019-01-06
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
浙江大学学报(工学版)(2016年9期)2016-06-05
北京测绘(2016年2期)2016-01-24
安徽文学(2015年8期)2015-09-10