基于物联网传感技术的高速公路边坡自动化安全监测系统应用研究
2024-01-17 08:56陆卫东
经纬天地 2023年5期
陆卫东
(上海浦海测绘有限公司,上海 210399)
0 引言
我国高速公路、高铁等交通设施的建设发展,改变了其穿越地区的原有地貌构造,产生了较多边坡结构。边坡因其独特结构,普遍具有较高的风险性,通常采用锚杆框架、挂网等措施进行安全防护,但边坡长期受到雨水冲刷,不可避免会产生位移变形,当变形量较大时,则会产生安全隐患,甚至造成边坡失稳。为对边坡安全状态进行实时掌握,需采用一定的技术方法对边坡变形信息进行准确获取[1],实时监控边坡变形情况,预防安全事故发生。传统监测方法多采用人工测量方式,监测人员手持全站仪、水准仪、测斜仪等仪器设备,对边坡进行安全监测[2],费时费力,数据生产周期长,监测成果具有一定的滞后性,时效性较差。物联网传感技术的发展为边坡安全实时监控提供了新的技术手段,以物联网技术为基础,将各个类型的底层监测元件和监测传感器紧密相连,辅以多传感器融合技术、边缘解算技术、无线通信技术、云解算技术等,构建边坡自动化安全监测系统,实时获取边坡安全数据,保障边坡结构及周边环境安全。
相较于传统人工监测,边坡自动化安全监测系统具有全天候、时效性高、无需人工干预等优势,通过在边坡高风险位置安装自动化监测设备,如GNSS 接收机、雨量计、自动化测斜仪等,依据预先设定的规则对监测点原始数据进行高频率采集,利用边缘解算对原始数据进行去噪、过滤,剔除异常值,然后通过多方式组网将原始观测数据远端发送至云端,由云网关进行数据检校、平差处理、拟合计算等,最终由专业监测云平台对外进行监测成果可视化展示[3]。边坡自动化安全监测系统需要具备实时预警功能,当边坡变形速率或累计变形量超过预先设定的限值时,需在第一时间将预警信息推送给相关负责人,便于及时采取措施,以防发生边坡安全事故。
本次研究在充分获取边坡安全监测需求的前提下,设计开发边坡自动化安全监测系统,对系统架构和作业原理进行详细阐述,验证自动化监测系统在边坡监测中的可行性及优势,并采用某边坡工程监测项目对自动化监测系统的成果准确性进行分析,进一步验证其自动化监测成果的可靠性,为高边坡安全监测提供切实可行的解决方案。
1 自动化监测系统设计
1.1 需求分析
边坡自动化安全监测系统旨在解决边坡常规人工监测频率低、时效性差等问题,在保证监测数据精度满足要求的前提下,采用一定技术方法将数据采集、解析等过程自动化,降低人工投入,提高监测效率。本次研究通过多方调研及实际应用等方式,汇总业主及监测人员对边坡自动化安全监测系统的真实需求,以期解决边坡监测现存问题。本次研究搜集汇总的边坡自动化安全监测系统需求如下:
1)方便安装实施。边坡自动化安全监测系统现场安装实施应尽量做到简捷、方便,尽可能降低现场设备安装时间,减少现场实施工作强度,且设备安装应有作业规范参考,不得出现危险作业。
2)降低环境影响。自动化监测设备的安装不得损坏边坡现场及周边生态环境,应尽量使用小型化监测设备[4],降低对生态环境影响,且自动化监测设备应采用环保材料,不得对环境造成污染。
3)成果准确安全。边坡监测的核心在于获取准确可靠的变形监测数据,无论采取何种监测方法,需确保监测数据准确可靠;同时自动化监测系统需具有较高的安全性,监测数据应支持多方式备份,便于追踪溯源。
4)简易操作流程。自动化监测系统参数设置、配置更改、数据查询、数据下载等操作应简单便捷,人机交互直观方便,无需操作人员具有较强的专业性,只要经简单培训后,即可对自动化监测系统进行日常运维及数据查阅等。
1.2 设计原则
边坡自动化安全监测系统应从以上统计需求出发,在确保监测成果高效准确的前提下,最大程度提升系统使用人员的操作便捷性,系统主要设计原则如下:
1)一致性。边坡自动化监测系统设计应满足规范要求,系统结构、数据存储、变量命名、函数接口等均应具有较高的一致性,便于系统各板块间逻辑交互及系统规范化管理,同时方便后续对自动化监测系统进行维护与升级。
2)安全性。自动化监测系统能够获取边坡空间绝对位置、气象条件等基础地理数据信息,故系统设计开发过程中需确保数据成果具有较高的安全性,且在边坡长期监测过程中,自动化监测系统需具有较高的稳定性及可靠性。
3)便捷性。边坡位移自动化监测系统包括硬件和软件两大部分,尽量使用小型化监测设备,确保安装过程较为方便快捷,便于作业人员进行快速安装,且使用环保材料,以减少对现场生态环境的影响;软件部分尤其是监测云平台,须具备友好的交互界面,简单直观,满足非专业人员使用操作需求。
4)兼容性。边坡安全自动化监测系统需具有较高的兼容性,支持多源数据交互存储,便于与其他自动化监测系统或监测云平台进行数据对接。
1.3 系统架构
边坡自动化安全监测系统整体而言包含硬件和软件两大板块,硬件板块主要是指安装在现场的传感器、采集器、天线模块及电源装置等,负责数据采集和数据传输;软件板块主要是对现场自动化监测设备进行行为控制,并对其采集的原始数据进行解析计算,然后进行可视化展示如图1 所示。依据监测对象的不同,边坡自动化安全监测系统又可划分为多个子系统,如,地表位移监测子系统、内部位移监测子系统、降雨量监测子系统、裂缝监测子系统等,各子系统综合利用传感器、采集器、云平台等软硬件模块,形成独立监测站,综合获取解析边坡变形情况。
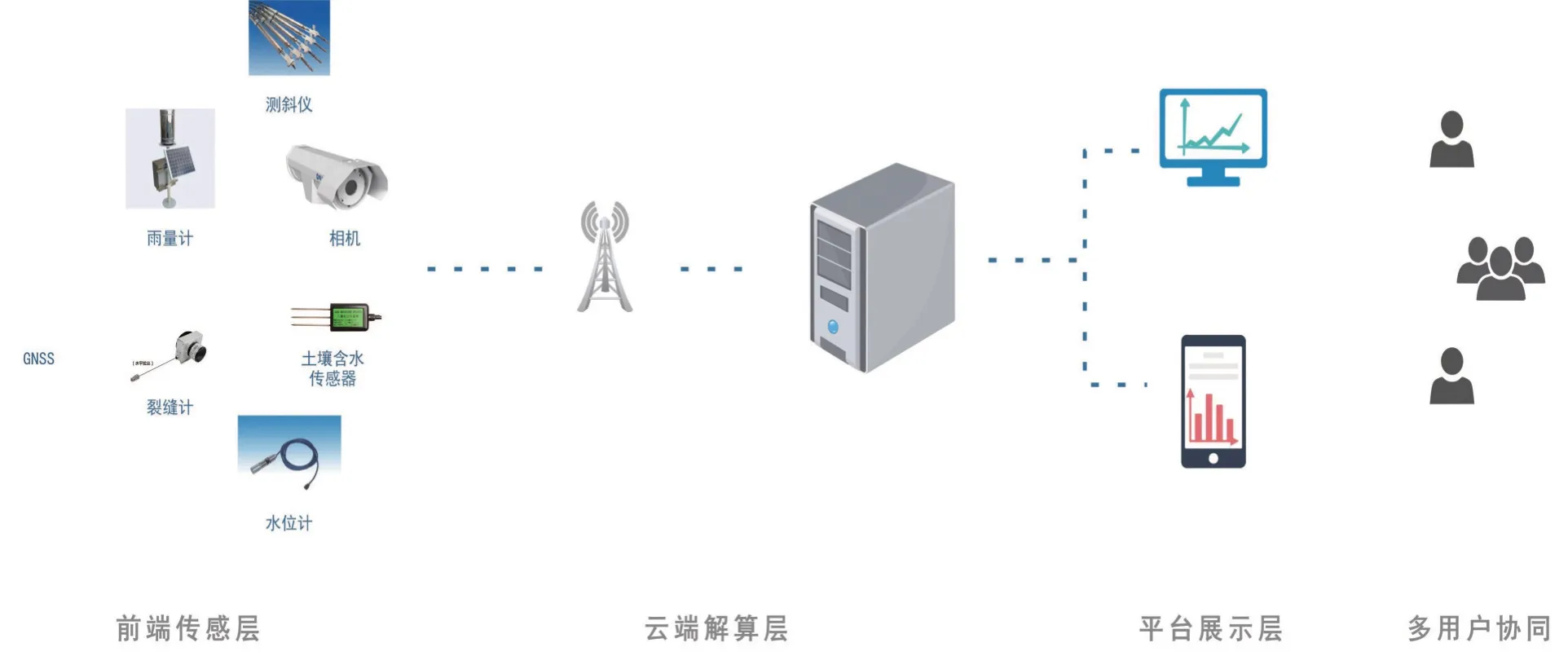
图1 边坡自动化安全监测系统整体架构
2 工程项目应用
2.1 项目概况
本次研究以某高速公路边坡为研究对象,采用自动化安全监测系统对其进行变形监测。该高速公路边坡位于地形起伏较大的山地区域,边坡相对较长,最大高度约为45 m;边坡主要岩体有软岩及较软岩,局部地区存在硬质岩。该边坡为六级边坡,一到三级边坡的坡比为1∶0.75,四到六级边坡的坡比为1∶1,各级边坡均采用防护措施进行安全防护,其中,一级、四级和五级边坡防护形式为锚杆框架梁,二级和三级边坡为锚索框架,六级边坡采用挂双网喷有机基材进行安全防护,安全系数相对较高。但边坡高度相对较高时,危险系数也高,一旦发生较大变形会导致高速公路发生破坏,引发交通事故,故需要对其进行跟踪监测,获取边坡变形信息。
2.2 边坡地表位移自动化监测子系统
本次研究采用GNSS 自动化监测系统对边坡地表位移进行全天候实时监测[5],其原理为利用BDS导航定位卫星获取边坡上布设的GNSS 监测站和稳定区域内基准站之间的相对空间位置信息,以获取大量原始观测数据为基础,对其进行去噪、平差、拟合等处理,生成较为准确可靠的坐标数据,将每次监测坐标与监测点初值进行对比作差即可得到该点位累计变化量。本次研究在高速公路边坡主要风险区域布设了4 个地表位移自动化监测点,点位分布如图2(a)所示;GNSS 接收机采用太阳能供电,以立杆形式安装,组织形式如图2(b)所示。
GNSS 自动化监测系统所获取的边坡变形数据为X、Y、Z三个方向的累计变化量,其中,X、Y方向的合位移即为平面位移,Z方向的变化量即为垂直方向位移。本次研究选取BD03 和BD04 监测点2019 年12 月3 日至2020 年2 月3 日共计两个月的自动化监测数据进行分析研究,如图3 所示。

图3 GNSS 自动化监测点累计位移-时间曲线图
由图3 可知:BD03、BD04 监测点累计位移变化可分为两个阶段:两个自动化监测点在2019 年12月3 日到2020 年1 月12 日间变形特征较为显著,平面及垂直方向变形速率较大;其中,BD03 监测点水平位移变形速率最高可达17.8 mm/d,垂直方向变形速率最高可达10.3 mm/d;BD04 监测点水平位移变形速率最高可达4.1 mm/d,垂直方向变形速率最高可达13.4 mm/d;累计变形值大幅度增加,处于快速变形阶段。2020 年1 月12 日至2020 年2 月3 日间,监测点变形速率大大降低,位移-时间曲线呈现渐变收敛状态,监测点水平位移和垂直位移均处于基本稳定状态,累计变形值缓慢增加,表示监测点处于缓慢匀速变形阶段。
本次自动化监测周期内,BD03 监测点水平方向累计变形量为196.9 mm,平均变形速率为3.3 mm/d,垂直方向累计变形量为45.0 mm,平均沉降速率为0.8 mm/d;BD04 监测点水平方向累计变形量为71.3 mm,平均变形速率为1.2 mm/d,垂直方向累计变形量为18.6 mm,平均沉降速率为0.3 mm/d。监测点累计位移量相对较大,边坡变形监测规范一级预警要求水平位移不大于40 mm,垂直方向位移不大于35 mm,因此两个监测点均触发一级预警,并通知到相应负责人,采取相关措施加强边坡安全防护。
2.3 边坡内部位移自动化监测子系统
GNSS 自动化监测系统是对边坡地表位移变形进行实时监测,无法获取边坡内部深层结构变形特征。本次研究采用固定式测斜仪对边坡内部位移进行自动化监测,通过在监测点位置钻孔埋设测斜管,将固定式测斜仪按照1 m 间距逐段连接,安装至测斜管内;采用RS485 总线进行数据近场传输,汇聚到地表数据采集箱内,进行边缘解算并远端发送至云端;内部位移自动化监测系统采用太阳能和蓄电池联合供电方式,以钢立柱形式进行安装。本次自动化监测布设了2 个内部位移监测断面,共计6 个自动化监测点,测点编号为ZK05~ZK07、ZK11~ZK13。
边坡内部位移自动化监测是以高精度三轴倾角计为基础,对边坡内部结构不同深度X、Y、Z方向的倾角变化进行高精度监测,并将其转换为各方向位移量(Δx,Δy,Δu,)从而对边坡内部结构位移变形进行跟踪监测。本次研究选择ZK05 监测点进行数 据分析,测孔各深度累计位移-时间曲线,如图4 所示。
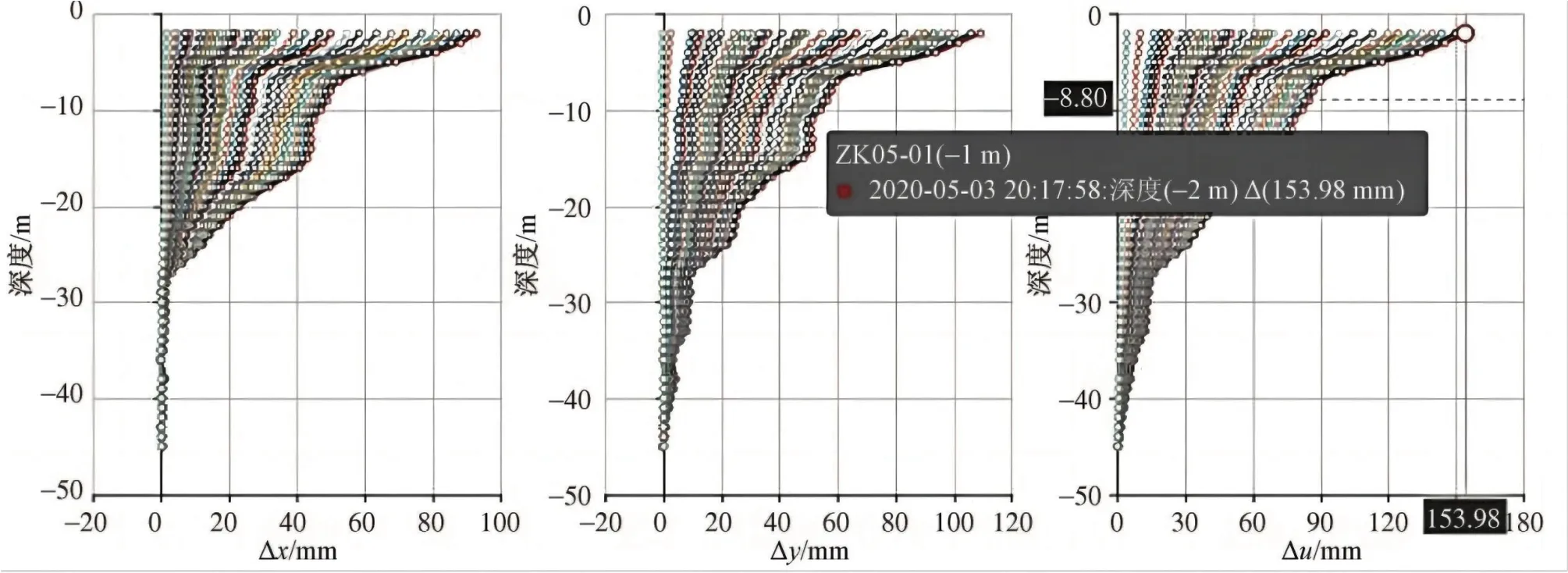
图4 ZK05 监测点各深度累计位移曲线
由图4 可知:截至2020 年5 月3 日,ZK05 监测点累计变形值较大,各方向均已超过一级预警60 mm 要求,变形速率相对较大且无收敛趋势。监测点主要变形深度为边坡内部1~27 m 位置,其中1~7 m 位置变形最为显著;7~27 m 位置变形逐渐减缓,随深度增加,累计变形逐渐减小;27~45 m 位置累计变形相对较小,基本可忽略不计。该内部位移测孔在靠近地表位置发生较大变形,已在第一时间通知到相关负责人,并采用一定措施进行加强防护,后续该监测点逐渐趋于稳定,无较大变形发生。
2.4 降雨量自动化监测子系统
当降雨量较大时会对边坡安全产生一定影响,本次研究采用翻斗式雨量计对边坡区域降雨量进行自动化监测,选择2020 年1 月14 日—2020 年2月15 日降雨量数据进行分析研究如图5 所示。其中,1 月15 日、1 月23 日、1 月24 日、2 月06 日和2月15 日降雨量较大,均超过20 mm,对比以上时间点GNSS 自动化监测数据发现,降雨量较大时后续BD03 和BD04 地表位移监测点也出现较大变形,因此当降雨量较大时,后续一段时间内边坡位移容易发生较大变形,边坡安全风险相对较大,需要通知到相关负责人,持续关注监测点变形信息,如,存在较大安全隐患,及时启动应急预案,加强边坡安全防护,杜绝安全事故发生。
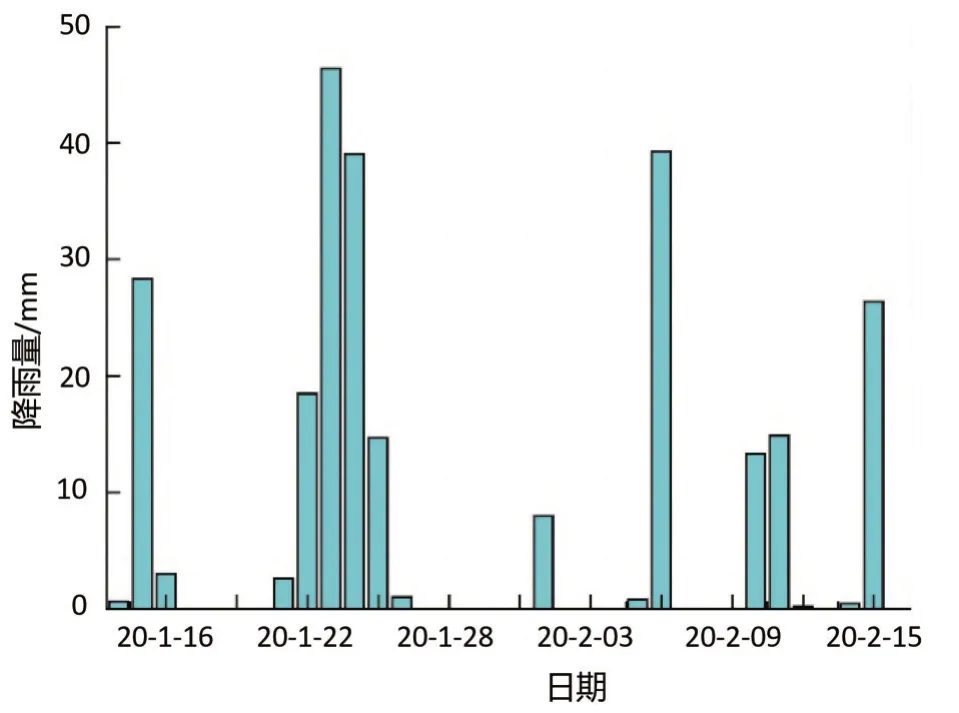
图5 降雨量自动化监测数据
3 结语
高边坡安全是近年来备受关注的地质灾害风险问题,需采用一定技术方法对高边坡变形特征及趋势进行跟踪监控。本文以物联网传感技术为基础,充分融合北斗卫星导航定位、无线通信、云解算等技术,从高边坡监测需求出发,设计开发边坡自动化安全监测系统,并成功应用于某山区高速公路边坡监测项目。通过对自动化监测数据进行分析研究,结合边坡实际变形特征,验证了边坡自动化监测成果的可靠性,为高风险边坡全天候高精度监测提供了可靠的技术方案。
猜你喜欢
音乐教育与创作(2023年10期)2023-11-16
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
中学生数理化·高一版(2020年6期)2020-07-25
水电站设计(2020年4期)2020-07-16
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
现代工业经济和信息化(2016年22期)2016-08-23
湖南畜牧兽医(2016年3期)2016-06-05
水利科技与经济(2016年8期)2016-04-22
水科学与工程技术(2016年6期)2016-02-27