无人机倾斜摄影测量像控点布设方案优化研究
2024-01-17 08:56吕树春
经纬天地 2023年5期
吕树春
(自然资源部第二大地测量队(黑龙江第一测绘工程院),黑龙江 哈尔滨 150000)
0 引言
消费级无人机的普及应用大大降低了设备成本,同时也为低成本高效率的大范围地物测绘提供了可能。相较于专业级无人机设备,消费级无人机不仅自身设备成本相对较低,且具有方便携带、操作简单、机动性较强等优势[1],通过搭载高分辨率相机进行倾斜摄影测量,能够实现高分辨率地物影像的快速获取,弥补了传统航空摄影测量方式仅能够从单一角度获取地物信息的弊端,在保障测绘成果质量的同时降低了航摄作业测绘成本,提高了测图效率。
消费级无人机可以搭载单镜头和多镜头进行航摄作业[2],为追求持续续航作业,目前普遍采用单镜头作业方式,航摄效率较高,但单镜头作业方式对于地物信息的全方位影像获取存在一定的局限性[3],航摄影像及实景三维模型成果较难满足生产使用要求。因此,本文重点针对消费级无人机搭载多镜头作业方式进行分析研究,通过在大疆精灵4无人机上搭载KG2000 Pro 五镜头倾斜相机进行航摄作业,对像控点数量及影像倾向对空中三角测量精度的影响以及不同像控点布设方式进行分析,探索不同应用条件下的像控点最佳布设方式,进一步改善消费级无人机在数字化城市建设中应用方式,提高数字城市三维实景模型成果精度。
1 研究区数据获取
本次研究选用某学校场地进行试验测试,校区总面积约为0.44 km2,教学楼等建筑分布较为密集,多为6 层左右的低矮建筑,但存在体育馆、天文台等形状不规则的建筑类型,同时校区内还存在人工湖、低矮小山丘、绿化用地以及硬化路面等,地物类型相对较为丰富,具有较强的典型性,能够最大程度模拟城市真实环境。
本次研究采用大疆公司推出的大疆精灵4 多旋翼航拍消费级无人机,整体操控性能较为优良,机身轻便灵活,续航能力强,且采购费用相对较低,适合小范围区域内的航摄作业[4]。无人机上搭载的倾斜摄影镜头为KG2000 Pro 五镜头倾斜相机,该相机是为大疆精灵4 定制研发的新型倾斜摄影系统,重量相对较小,像素较高,能够实现高分辨率地物影像的全方位快速采集[5]。无人机详细参数如表1所示,相机参数如表2 所示。

表1 大疆精灵4 消费级无人机参数

表2 KG2000 Pro 五镜头倾斜相机参数
由于消费级无人机续航能力有限,为确保无人机在完成航摄作业的同时能够顺利返航,需依据测区大小进行分区作业。本次研究将研究区划分为4个区域,航摄作业相对航高为200 m,航向重叠度为80%,旁向重叠度为70%,共计获得了780 张下视航摄影像,2945 张倾斜影像。以倾斜摄影垂直和倾斜倾向的外方位元素为依据,采用并行算法对航摄影像进行多视影像精准匹配,构建密集点云数据,获取航摄影像中的同名点三维坐标,进而生成数字地表模型。
2 空中三角测量精度评价
空中三角测量是无人机倾斜摄影测量的核心环节,其成果精度会对倾斜摄影测量成果质量产生较大影响,能够在一定程度上反映倾斜摄影测量成果质量。本次研究采用搭载KG2000 Pro 五镜头倾斜相机的大疆精灵4 无人机获取试验区范围内下视影像和不同方向的倾斜影像,通过改变像控点数量的形式对倾斜影像、下视影像以及多视影像的空三精度进行分析研究,分别统计布设不同数量像控点的情况下,倾斜影像、下视影像以及多视影像的平面及高程中误差,计算式如式(1)所示:
式中:ms为航摄影像平面中误差;mh为航摄影像高程中误差;mx为x方向的坐标中误差;my为y方向的坐标中误差。
本次研究在该校区试验场地内,按照相同航线、相同航摄参数进行外业航摄作业,逐渐增加像控点数量,然后统计倾斜影像、下视影像以及多视影像的平面及高程中误差,统计结果如图1 所示。
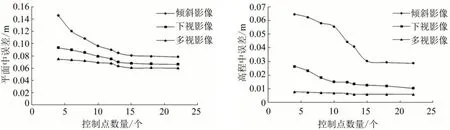
图1 不同影像空三成果精度对比
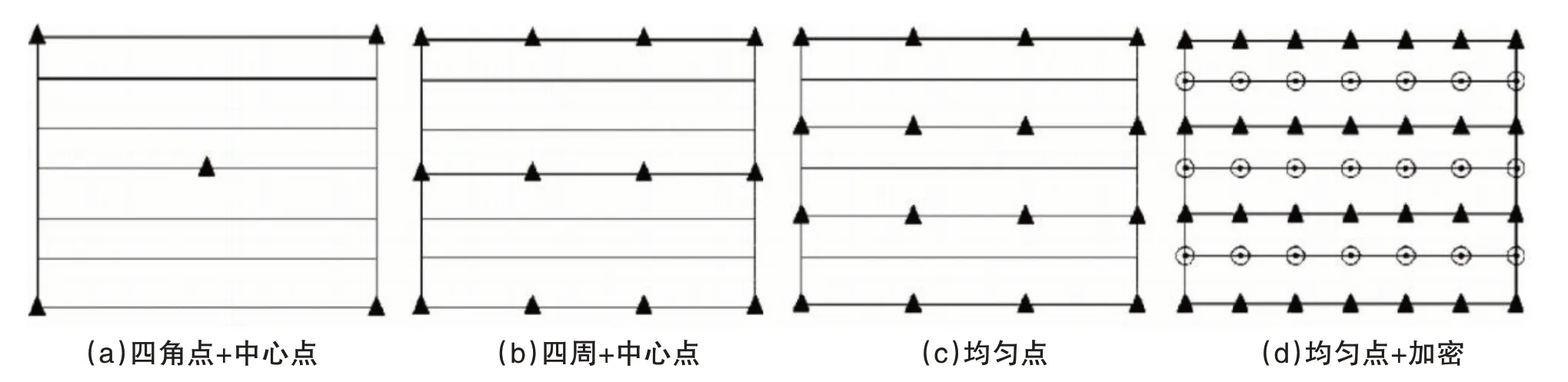
图2 传统摄影测量像控点布设方案
由图1 可知:随着像控点数量的不断增加,倾斜影像、下视影像以及多视影像空三解算成果的平面及高程中误差均呈现下降趋势,即多种影像空三解算成果平面和高程精度均有所提高;当像控点数量较少时,航摄影像精度相对较差,不断增加像控点数量,中误差大幅度降低,其中倾斜影像下降幅度最大,多视影像下降幅度最小;当像控点数量达到15 个之后,中误差开始逐渐趋于平稳,持续增加像控点数量航摄影像精度也无法得到有效提升。因此表明在本次航摄作业过程中,为追求航摄影像精度和外业测量工作量的最优组合,应将像控点数量保持在15 个左右。
对相同数量像控点条件下倾斜影像、下视影像以及多视影像的平面及高程中误差进行分析可得,无论布设多少个像控点,倾斜影像空三解算成果平面和高程中误差均高于下视影像和多视影像,且多视影像中误差最低;当像控点数量为4 个时,3 种影像空三解算成果平面和高程中误差均达到最大值,其中,倾斜影像空三解算成果平面中误差为0.146 2 m,高程中误差为0.064 5 m;下视影像空三解算成果平面中误差为0.093 3 m,高程中误差为0.026 4 m;多视影像空三解算成果平面中误差为0.075 0 m,高程中误差为0.007 8 m。这些均能满足《工程摄影测量规范》中对于空三加密成果的精度要求,但倾斜影像空三解算成果精度较差,多视影像空三解算成果精度最优,分析原因为像片倾斜时容易引发像点位移,从而使得影像成果误差变大。
综上所述,采用五镜头相机进行航摄作业,合理布设像控点数量,获取多视影像数据,能够大大降低野外数据采集和内业数据处理工作量,同时可以保障最优航摄影像精度。但由于研究区面积仅为0.44 km2,面积较小,地表建筑和地物类型种类有限,地形起伏相对较小,存在一定的局限性,有待后续采用复杂城市环境进行进一步论证。
3 倾斜摄影测量像控点优化设计
3.1 传统像控点布设方案
传统摄影测量航摄作业多采用如图3 所示的几种像控点布设方案,尽可能使得像控点能够覆盖整个测区[6]。但由于不同航摄测区特点不同,传统像控点布设方案往往较难实施,且航摄成果精度相对较差,难以满足生产使用需求。在倾斜摄影数据采集过程中,一般将航摄重叠度设置为80%,旁向重叠度控制在70%~80% 之间[7],采用图3 中的像控点布设形式容易造成测区中间区域航摄影像较为密集,而四周区域航摄影像较为稀疏,从而使得测区四周边缘区域精度相对较差[8]。因此,为提高航摄作业成果精度,同时最大程度减少像控点数量,降低野外数据采集工作强度,有必要对倾斜摄影测量像控点布设方法进行优化研究,寻求符合成果精度要求的最佳布控方案。
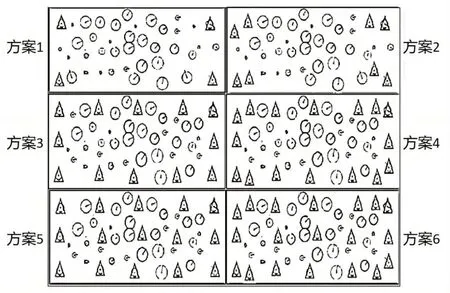
图3 倾斜摄影测量像控点优化设计
3.2 优化像控点布设方案
为使研究结果更加贴合城市复杂地物类型及特殊地形环境,本次试验选择某山区城市进行像控点布设方案优化研究,相较于校园内地形情况,该山区城市研究区域地表起伏较大,测区面积为1.821 km2,地物类型复杂多样,包含高层居民建筑、平房、人工湖、山区景点等多种地物类型,是城市复杂地形环境的缩影。考虑到消费级无人机在航摄作业过程中容易受到航向和旁向重叠度以及像片旋角等因素的影响[9],依据其对测区的航摄影像覆盖特征,本次研究共计设计6 种像控点布设方案,如图4 所示,三角形标识为布设的像控点,圆形标识为检核点,像控点和检核点总数为63 个。
方案1:测区四角像控点单点布设方案,即在测区四个边角分别布设1 个像控点,测区内均匀布设59 个检核点;
方案2:测区四角像控点点组布设方案,即在测区四个边角分别布设2 个像控点,测区内均匀布设55 个检核点;
方案3:测区四边像控点均匀布设方案,即在测区四周均匀布设12 个像控点,测区内均匀布设51个检核点;
方案4:测区四角点组布控及测区周边均匀布控联合布设方案,即在测区四个边角分别布设2 个像控点,同时在测区四周均匀布设8 个像控点,共计16 个像控点,测区内均匀布设47 个检核点;
方案5:测区区域网内像控点均匀布设方案,即在测区范围内均匀布设像控点,边角位置不考虑加密或单独布设,共计布设15 个像控点,测区内均匀布设48 个检核点;
方案6:测区四角像控点点组布控及测区区域网像控点均匀布控联合布设方案,即在测区四个边角分别布设2 个像控点,同时在测区区域网均匀布设11 个像控点,共计19 个像控点,测区内均匀布设44 个检核点。
3.3 空三精度分析
对以上6 种像控点布设方案的空三解算成果进行精度评定,分别计算各个像控点布设方案的空三成果平面和高程中误差,统计结果如表3 所示。
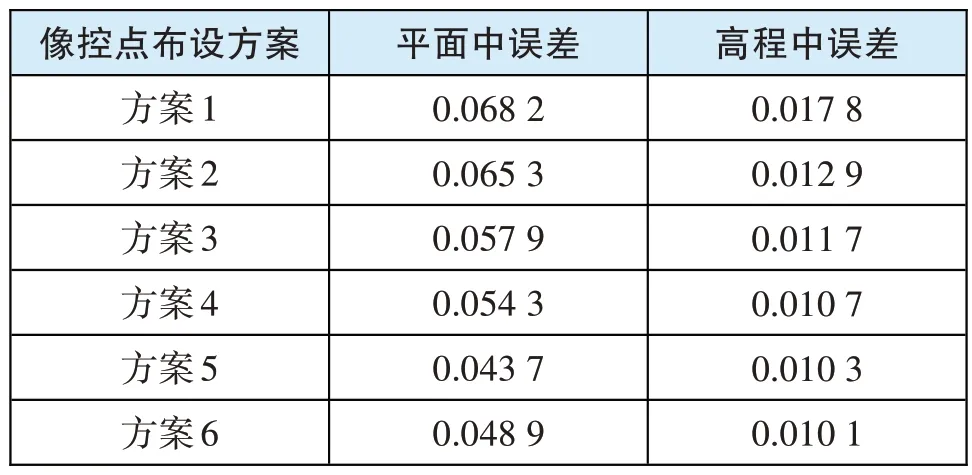
表3 方案1—方案6 空三解算成果精度对比单位:m
对表3 进行分析可知:
1)方案5 空三解算成果平面中误差最小,为0.043 7 m,方案6 空三解算成果高程中误差最小,为0.010 1 m;方案5 和方案6 均涉及在测区区域网均匀布设大量像控点,空三解算成果精度相对较高,但同样外业测量工作量较大;当对无人机倾斜摄影测量成果有较高要求时,可采用方案5 或方案6 进行像控点布设,最大程度保障成果精度。
2)方案1 为测区四角单点布设像控点,空三解算成果相对较低,但满足规范中空三解算精度要求;方案2 是在方案1 的基础上进行优化,在测区四角采用点组的形式布设像控点,空三解算精度有所提升,但仍旧低于测区区域网均匀布设像控点空三精度;但方案1 和方案2 布设的像控点数量相对较少,外业测量作业工作量较小,当对测绘成果精度要求不高时,可采用该方案快速作业。
3)方案3 像控点数量相对较为适中,适用于在测区内部无法布设像控点的项目,如,抢险救灾地形测绘等;若要尽可能保障倾斜摄影测绘精度,可利用四角点组和测区周边联合布控方式,增加像控点布设数量,提高成果精度。
综上所述,以上6 种像控点布设方案空三解算成果均能满足《工程摄影测量规范》要求,在实际作业过程中,依据测区像控点布设难度及对测绘成果精度的实际要求,合理选择像控点布设方式,因地制宜,提高作业效率。
4 结语
本次研究通过采用大疆精灵4 消费级无人机搭载KG2000 Pro 五镜头倾斜相机进行航摄作业,对倾斜影像、下视影像以及多视影像空三精度进行分析研究,验证了同等数量像控点条件下多视影像的空三成果精度最佳;并以增强测区边角控制权重为目的,以大面积复杂地物类型城市区域为试验对象,设计6 种像控点布设方案对传统布点方法进行优化研究,对比分析不同方案的空三解算成果精度及像控点布设特点,发现在相同测区面积、相同地物类型条件下,测区区域网均匀布设像控点空三解算成果精度相对较高,但像控点数量较多,大大增加了外业测绘工作量;四角布设像控点成果精度虽然较低,但满足规范精度要求,适用于测区影像覆盖率相对较高,测区内部不易进入、难以布点的航摄项目。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
浙江工业大学学报(社会科学版)(2019年2期)2019-07-08
测绘通报(2018年10期)2018-11-02
石油化工建设(2017年5期)2018-01-26
照明工程学报(2017年6期)2018-01-10
中国卫生(2016年2期)2016-11-12
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11