
SBW系统中驾驶员转向特性控制研究
2024-01-26 09:18刘晓艳
机械设计与制造 2024年1期
刘晓艳
(1.江苏电子信息职业学院,江苏 淮安 223003;2.江苏电子产品制造工程技术研究开发中心,江苏 淮安 223003)
1 引言
车辆转向操控性能主要分为车辆转向特性和驾驶员转向操控两方面。线控转向(SBW)系统克服了传统汽车转向系统的机械连接限制,在转向设计方面具有更大的灵活性,这也对驾驶员转向操控提出了更高的要求[1-3]。研究发现,驾驶员的驾驶经验、习惯、驾驶时的精神状态等因素均对驾驶行为产生影响[4-7]。因此,线控车辆的转向控制需兼顾多样化的驾驶员特性对转向控制策略的影响,提高操控舒适性与驾驶安全性。现有对驾驶员特性的研究侧重在驾驶习惯辨识及驾驶员生理特性分析方面。文献[8]通过驾驶模拟器试验对驾驶员习惯进行了谨慎型、一般型、激进型三种分类,并构建了特性辨识模型。文献[9]在驾驶员预瞄模型基础上,综合神经肌肉反应、操控反应延迟等生理和操控行为特征,构建驾驶员的转向行为模型。构建的驾驶员模型反映差异化驾驶特性对转向控制的影响,但由于生理、心理及外部环境因素均对驾驶员转向行为产生影响,使得对驾驶员特性的分类存在一定的局限性。
这里在分析驾驶员特性参数对转向系统性能影响的基础上,建立单点预瞄驾驶员模型,结合驾驶模拟器验证和BP神经网络,完成驾驶员特性参数的分类与在线辨识,针对不同的驾驶员特性,最终构建基于RBF自适应神经网络的线控转向控制策略,满足不同驾驶特性的线控转向控制需求。
2 驾驶员特性与预瞄模型
2.1 驾驶员特性分析
驾驶员作为车辆操控者,其本身也是一个特殊的控制系统,而驾驶员特性就是这个特殊控制系统的特征[10-12]。驾驶员特性的物理属性包括预瞄行为和自适应的驾驶行为,预瞄行为体现驾驶员对道路及外部环境变化的感知,感知后在转向操控上的大脑反应延迟时间及身体肌肉的延迟则体现了驾驶员的生理特征,转向比例增益则体现了驾驶员的转向操控熟练程度。因此,预瞄时间、延迟时间、转向操控增益等特性参数体现驾驶员特性的差异,而通过建立预瞄跟踪模型可以真实反映驾驶员特性。
2.2 驾驶员预瞄模型
根据预瞄时间内前方道路的位置、车辆状态,依据横向位置偏差建立反映驾驶员特性参数的预瞄模型[13-14],如图1所示。
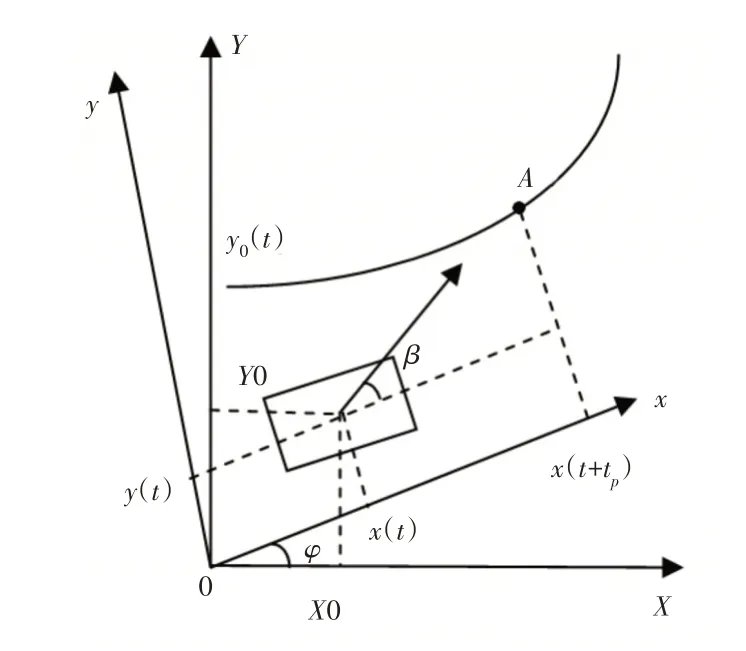
图1 驾驶员预瞄模型Fig.1 Preview Model of Driver
图中:XOY—地面坐标系;xoy—对坐标系;φ—车辆横摆角;β—侧倾角;ω—横摆角速度,车辆相对于地面坐标系的位置可表示为:
在预瞄时间tp时刻,对应的侧向位移误差为:
式中:Ytp(s)—期望路径处的侧向位移;Y0(s)—当前位置时刻的侧向位移;νxtp—两地之间的水平位移。
驾驶员为消除侧向位移误差ΔY(s)而作用在方向盘上的转角可表示为:
式中:τd1—大脑认知延迟时间;τd2—手臂肌肉动力学延迟时间;τL—微分时间常数;h—转向操控增益。
由于τd1和τL为远小于1s的时间,上式可近似为:
式中:k—常数;Td-延迟时间,为认知延迟时间与肌肉延时时间之和;Tp-预瞄时间,为驾驶员前视和微分时间之和。
假设车辆转向机构的传动比为ig,则车辆前轮转角可表示为:
上式是包含驾驶员特性参数的转角控制器模型,反映驾驶员特性与前轮转角控制间的关系。
3 驾驶模拟器试验
选用城市道路中常见的直角转弯工况和双移线工况作为试验条件,选取不同驾驶特性的驾驶员,采用六自由度的驾驶模拟器试验测试得到转向数据。
为充分实现不同驾驶员特性数据采集,驾驶模拟器实验对象选取驾龄不同、年龄分布差异的男女驾驶员各100 名,如表1 所示。

每位驾驶员在身体健康状态下,完成直角转弯工况和双移线工况下的试验,为保证测验数据的完整性和可对比性,每人每种工况试验重复3次。通过六自由度驾驶模拟器实时采集不同工况下的驾驶员行为特性数据和车辆状态数据,选取部分驾驶员特性参数,如表2所示。
表中:Tp、Td、h—直角转弯工况下的预瞄时间、延迟时间和转向操控增益,Tp′、Td′、h′—双移线工况下的预瞄时间、延迟时间和转向操控增益。
从表2中可以看出,不同驾驶员的预瞄时间Tp′差异明显,同一驾驶员不同工况下的预瞄时间存在一定的差异,所需延迟时间Td较小的驾驶员,其转向操控增益越大,相对驾驶更为熟练。
4 基于驾驶员特性的前轮转角控制策略
线控转向控制系统中,驾驶员模型输出方向盘转角经变传动比规则后得到理想前轮转角,经线控转角控制器输出后使车辆准确转过一定角度,实现前轮转向的准确控制。
RBF(Radial Basis Function,径向基函数)神经网络具有收敛速度快,不易陷入局部极值等优点[15],可以满足非线性控制实时控制要求,这里以线控转向车辆的横摆角速度作为控制目标,采用RBF神经网络的模糊控制器对横摆角速度的自适应控制,实现不同工况下的智能线控转向需求,提高线控转向适应性。RBF神经网络控制器结构,如图2所示。
在RBF 网络结构中,网络的输入向量为:
式中:v(k)—车速;δ(k)—方向盘转角。
网络采用高斯函数作为输入向量的隶属函数,网络的径向基向量H表达式为:
式中:hj-各结点的高斯函数,表达式为:
式中:Cj—第j个结点的中心矢量;bj—网络的基宽向量。
隐含层网络权值均设为1,RBF 网络采用K-means 算法对样本聚类形成有效的隐层中心,使用最小二乘法快速准确地获得隐层到输出层的最佳权值连接。
模型训练样本来源于驾驶模拟器试验数据,驾驶模拟器采集两种工况下的驾驶员特性参数及车辆状态信息,共1200组数据,随机抽取1000 组数据用于模型训练,另外200 组数据用于模型验证。
5 仿真验证
为验证转向控制器与不同驾驶员特性的辅助作用,基于Car-Sim 和Matlab/Simulink 搭建了线控转向汽车模型,试验车辆参数,如表3所示。

表3 试验车辆模型参数Tab.3 Test Vehicle Model Parameters
选取驾驶特性差异较大的两位驾驶员(表2中驾驶员1和驾驶员12),在直角转弯转向瞬态响应和典型双移线工况两种道路情况,试验采用RBF自适应神经网络控制方法下的车辆输出状态随车速的变化情况。
5.1 直角转弯工况
以低速(30km/h)、中速(60km/h)和高速(90km/h)为例,验证不同车速下转向控制器作用下的车辆输出影响情况,采集驾驶员1操控下的车辆状态响应曲线,如图3所示。

图3 直角转弯时不同车速下的车辆横摆角速度响应Fig.3 Yaw Rate Response with Different Speed Under Right Angle Turn
图3为驾驶员1在转向控制器作用下的车辆的横摆角速度随车辆速度变化的响应曲线,从图中可以看出,车辆的横摆角速度随车速的提高不断增加,在不同的给定车速变化情况下,车辆能够快速恢复至稳定状态。
采用RBF 自适应转向控制器后,车辆分别在2.4s、3.8s、4.1s左右达到预设速度,与无控制器方式相比,车速响应效率提升约(7.9~17.1)%,证明采用RBF 自适应转向控制器达到预期控制效果。
为对比转向控制器对不同驾驶员特性转向辅助控制效果,以中速段为例,对比直角转弯工况下转向瞬态响应情况下驾驶员1和驾驶员12操控下,车辆的输出响应变化情况,如图4所示。

图4 直角转弯转向瞬态响应下不同驾驶员特性的车辆横摆角Fig.4 Yaw Rate with Different Driver Characteristics Under Quarter Turn
从图中可以看出,在未施加转向控制器时,驾驶员1操控下的车辆横摆角在[-0.18,0.21]之间,驾驶员12操控下的车辆横摆角在[-0.32,0.31]之间,可以看出驾驶员1的转向操控熟练度优于驾驶员12;当施加转向控制器后,驾驶特性不同的两位驾驶员操控下的车辆横摆角波动范围均变小,说明车辆运行稳定性提升;施加转向控制器后的输出响应曲线接近一致,说明控制器对不同驾驶特性的转向辅助作用有差异,具有自适应性,最终提高驾驶的舒适性和安全性。
5.2 双移线工况
双移线工况下,采集驾驶员1在高、中、低速三种状态的车辆输出响应曲线,如图5所示。
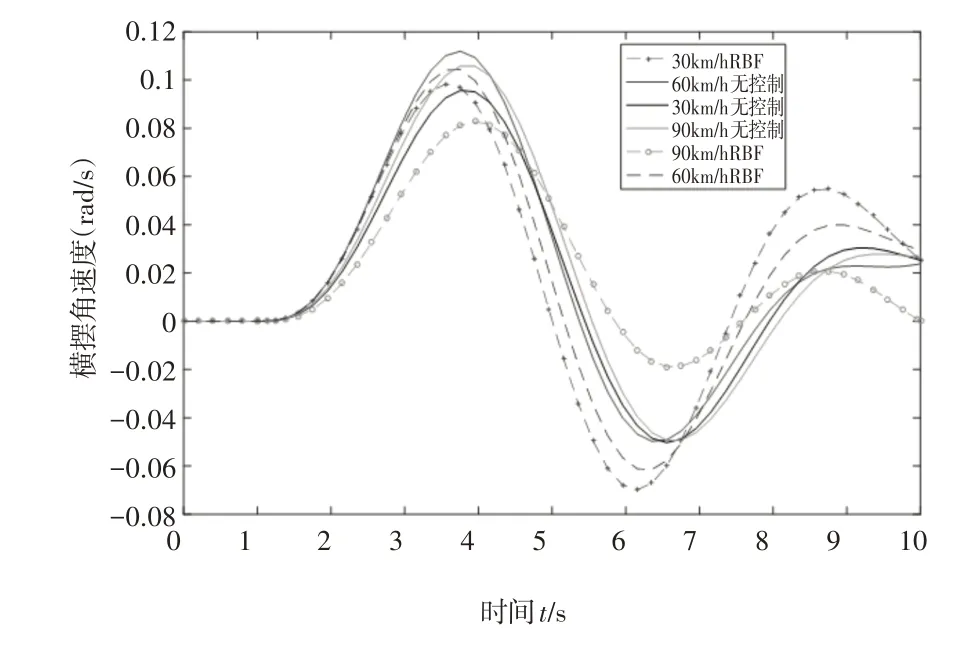
图5 双移线时不同车速下的车辆横摆角速度响应Fig.5 Yaw Rate Response with Different Speed Under Double Lane Change
从图中可以看出,车辆的横摆角速度随车速的提高而增加,采用RBF自适应控制器后,在不同车速状态下,车辆均能够快速恢复至稳定状态;与无控制方式相比,采取转向辅助控制后,当车辆30km/h开始加速过程中,相比同等车速下的无控制方式,车辆横摆角速度峰值下降率分别为13.6%,25.3%,8.2%;证明采用RBF自适应转向控制器提高车辆转向过程的稳定性。
以中速段为例,双移线工况下,驾驶员1和驾驶员12操控的车辆输出响应曲线,如图6所示。

图6 双移线工况下不同驾驶员特性的车辆横摆角Fig.6 Yaw Rate with Different Driver Characteristics Under Double Lane Change
从图中可以看出,与未施加转向控制器相比,驾驶员1和驾驶员12 操控下的车辆横摆角的幅值下降率分别为29.3%、41.2%,说明施加RBF自适应转向控制器后,改善了不同驾驶特性驾驶员的车辆转向稳定性,且对于不同驾驶员特性操控下的车辆输出响应曲线接近一致,说明控制器对差异化驾驶特性的转向辅助作用具有自适应性。
上述通过两种工况下,不同车速、不同驾驶特性对比仿真验证,设计的RBF转向控制器能够实现高、中、低速三种车速运行状态的稳定转向控制,对于驾驶特性显著差异的驾驶员转向操控具有自适应性,提高驾驶舒适性与安全性。
6 结论
通过对不同驾驶员转向控制过程分析,设计了RBF 转向控制器实现了不同车速、不同工况下的稳定转向。
(1)分析了驾驶员特性差异对转向控制的影响,建立反映驾驶员特性参数的预瞄模型。
(2)通过驾驶模拟器试验采集驾驶员特性参数信息,试验数据显示,转向控制中延时时间较少的驾驶员,其转向操控增益越大,反映出该驾驶员的转向操作更熟练,当工况改变时,驾驶员所用的预瞄时间随之变化。
(3)所设计的RBF自适应转向控制器可以实现在高、中、低速段的转向稳定性控制,车辆横摆角速度下降率在(7.9~17.1)%,对于不同驾驶特性的驾驶员转向控制效果具有一致性,证明RBF自适应控制器在线控车辆转向上具有良好的自适应特性。
本研究方法符合“车适应人”的设计理念,提高了线控车辆转向的稳定性、驾驶舒适性与安全性。可为车辆转向控制提供理论参考。
猜你喜欢
汽车纵横(2022年10期)2022-10-28
汽车纵横(2022年9期)2022-09-15
汽车纵横(2022年9期)2022-09-15
煤气与热力(2021年3期)2021-06-09
湖南邮电职业技术学院学报(2020年3期)2020-10-13
交通运输系统工程与信息(2020年1期)2020-02-28
电子制作(2018年9期)2018-08-04
汽车维护与修理(2018年1期)2018-04-04
中国塑料(2016年8期)2016-06-27
汽车维护与修理(2015年5期)2015-02-28
