随机参数摄动下的高超声速飞行器姿态控制
2024-01-30 14:51刘正洋
系统工程与电子技术 2024年2期
刘正洋, 周 丽,2,*, 张 瑞
(1. 南京信息工程大学自动化学院, 江苏 南京 210044;2. 江苏省大气环境与装备技术协同创新中心, 江苏 南京 210044)
0 引 言
高超声速飞行器(hypersonic vehicle,HSV)极高的飞行速度、大的飞行包络以及机体结构的强非线性、强耦合等特点使得飞行器控制系统的设计面临着许多挑战。复杂的飞行环境使得飞行器在飞行的过程中,不仅要面临着一系列非线性干扰,模型参数受气动力特性的影响也是随机、快速变化的[1],这给飞行器控制系统的设计带来了很不利的影响。因此,研究和解决外部非线性干扰和模型参数随机摄动下的高超声速飞行器控制问题具有非常重要的意义[2-4]。
针对上述问题,国内外学者对高超声速飞行器控制进行了大量的研究,其中包括基于小扰动线性化模型的控制方法[5]。小扰动线性化主要是在平衡点附近设计控制器,对于存在参数摄动和强干扰的HSV控制系统来说控制效果不佳[6]。轨迹线性化(trajectory linearization control, TLC)方法是20世纪90年代中后期建立并发展起来的一种非线性跟踪和解耦控制方法。与小扰动线性化不同,TLC相当于在标称轨迹上的每一点都进行线性化,在鲁棒性方面具有明显的优势,并被成功运用于无人艇路径跟踪[7]以及飞行器制导与姿态控制系统中[8-9]。然而,非线性时变反馈调节律难以设计,因此传统TLC方法中的闭环系统误差调节器采用线性时变状态反馈控制律实现,虽然可以获得沿着标称状态的指数稳定,但却是局部的,当系统中不确定因素足够多时鲁棒性将难以保证[6]。文献[10-12]针对系统参数线性和非线性摄动以及外部干扰导致的不确定性问题,分别提出了基于增强型复合非线性扩张状态观测器的轨迹线性化方法[10]、基于模型参考自适应的轨迹线性化方法[11]和基于高阶滑模状态观测器的轨迹线性化方法[12]。由此可见,将传统TLC方法与其他控制方法结合,利用其他控制方法的优点设计状态反馈控制器,是提升TLC控制性能的关键所在。近些年,提出了一种综合模型预测和滑模控制优点的预测滑模控制(model predictive based sliding mode control, MPSMC)方法[13-16],该方法通过利用模型预测中的滚动优化和反馈矫正来优化滑模轨迹的到达过程,达到削弱滑模控制中抖振的目的[17],并成功被应用到了汽车线控转向系统[18]和飞行器姿态控制系统中[19],取得了良好的控制效果。该方法对非线性参数摄动和干扰导致的系统不确定性具有强鲁棒性,同时由于滑模控制的引入使得控制系统能够在初始时刻快速跟踪指令信号,趋近于稳定。本文将预测滑模控制方法运用到TLC的误差调节控制器的设计中,提高TLC控制器对非线性参数摄动和干扰的鲁棒性。
上述文献仅对一些线性和非线性的不确定性问题进行了研究。而在实际情况中,高超声速飞行器还面临着一系列随机不确定性问题。一方面,环境干扰,尤其是风干扰,对高超声速飞行器姿态稳定的影响十分明显,而风干扰往往也是随机的[20-21];另一方面,由于HSV的飞行环境十分复杂,不能完全通过风洞实验获取精确的气动参数。在这种情况下,为提高控制系统精度,充分考虑气动参数随机摄动对控制系统的影响是十分必要的[22-23]。蒙特卡罗(Monte Carlo, MC)是较为常用的随机问题数值处理方法,文献[24-26]利用MC方法对飞行器制导和控制律进行了仿真,验证了飞行系统的鲁棒性。但是MC方法的收敛速度缓慢,特别是当具有多个随机变量时,计算负担较大。为此,文献[27]提出一种基于数据退火的马尔可夫链MC方法,实现了随机参数摄动下高超声速飞行器系统参数的辨识,并成功运用于动态逆控制器设计中。文献[28]提出一种MC模型预测控制方法,针对目标函数的多模态问题,设计了一种聚类方法,并成功应用于移动机器人导航中。文献[29]提出一种随机模型预测控制方法,通过利用Gramian和Riccati不等式,确定了一个包含一定概率的随机扰动的集合,保证了被控系统的渐近稳定。
本文为了实现参数随机摄动和非线性干扰同时作用下的高超声速飞行器姿态的快速跟踪控制,提出了一种基于TLC和扩展卡尔曼滤波的MPSMC(MPSMC based extended Kalman filter and TLC, MPSMC-EKTLC)方法,该方法在传统TLC方法的基础之上进行了改善:针对模型参数随机摄动的问题,通过设计扩展卡尔曼滤波器对受扰状态进行滤波,得到期望的状态响应;采用预测滑模控制方法代替传统TLC控制中的线性时变状态反馈控制方法设计误差稳定调节器。仿真结果表明设计的控制系统在快速趋于稳定的同时,对随机参数摄动和非线性干扰都具有强鲁棒性。
1 飞行器模型和问题描述
1.1 飞行器模型
参考文献[22],得到如下6自由度高超声速飞行器非线性刚体动力学方程:

(1)
(2)
同时有:
(3)
式中:M,V,γ分别为HSV的质量、飞行速度和倾斜角;α,β,μ分别为迎角、侧滑角和滚转角;p,q,r分别为滚转角速率、俯仰角速率和偏航角速率;Tx,Ty,Tz分别为推力在地面坐标系x,y,z轴上的分力;Ixx,Iyy,Izz为转动惯量,均为关于质量的函数,具有快时变性;g为重力加速度。同时给出如下空气动力模型:
(4)

根据时标分离和奇异摄动原理,将式(4)代入式(1)和式(2)中可得如下关于HSV姿态控制的快慢回路模型。
慢回路模型:
(5)
快回路模型:
(6)
式中:Ω=[α,β,μ]T;ω=[p,q,r]T;fs=[fα,fβ,fμ]T;ff=[fp,fq,fr]T:
(7)
(8)
(10)
式中:b为翼展长度;c为平均气动弦长;Xcg为质心和参考力矩中心之间的长度,气动参数均为迎角α和马赫数Ma的函数,可表示为Ci,j=Ci,j(α,Ma)。
1.2 问题描述
高超声速飞行器极高的飞行速度、复杂的飞行环境以及特殊的机体结构,使得其对气动特性的变化十分敏感,气动参数的摄动将严重影响飞行器的控制性能。现有文献对气动参数线性摄动和非线性摄动的情况进行了充分的研究,而针对随机摄动的相关文献还较少[22]。因此,本文设计的控制方法旨在实现当存在随机参数摄动和非线性干扰情况时,高超声速飞行器姿态能够稳定快速地跟踪控制指令,主要通过采用TLC方法获得高超声速飞行器线性不确定性误差调节模型,同时设计扩展卡尔曼滤波器对受扰状态进行滤波,并利用预测滑模控制方法设计误差稳定调节器。
图1分别展示了升力系数CL、阻力系数CD以及侧力系数CY不同摄动情况的对比。

图1 气动参数摄动对比Fig.1 Comparison of aerodynamic parameters
(11)
2 控制器设计
2.1 轨迹线性化
轨迹线性化控制方法是一种基于微分代数谱理论的非线性控制方法,其主要思想是利用非线性动态逆将轨迹跟踪控制问题转化为一个跟踪误差调节问题,然后利用线性时变系统的并联微分(parallel differential, PD)谱理论设计状态反馈控制律,使得该误差跟踪系统一致渐近稳定。
以慢回路为例,式(3)可以写成如下形式:
(12)

(13)
定义状态误差、输出跟踪误差以及误差跟踪控制的输入分别为
(14)
则有:
(15)

(16)
式中:
(17)
2.2 设计扩展卡尔曼滤波器
在式(14)中,令ws(t)=Φs(t)pe,则ws(t)为经过轨迹线性化分离出的因参数随机摄动导致的随机干扰。结合式(9)能够得到ws(t)的统计信息,因此通过设计扩展卡尔曼滤波器滤除随机干扰,得到期望的输出状态并将其运用到控制器设计,增强控制器在模型参数随机摄动下的鲁棒性。
以慢回路为例,系统式(16)离散化后为
(18)
则根据式(11)可知ws(k)的均值为
E(ws(k))=E(Φs(k)pe(k))=
Φs(k)E(pe(k))=0
(19)
方差为
σws=E[(ws(k)-E[ws(k)])(ws(k)-E[ws(k)])T]=
E[ws(k)ws(k)T]=
E[Φs(k)pe(k)pe(k)TΦs(k)T]=
Φs(k)E[pe(k)pe(k)T]Φs(k)T=
Φs(k)σpeΦs(k)T
(20)
(21)

2.3 设计伪动态逆控制器
(22)
(23)
式中:ωdiff为低通滤波器带宽,其选取既要保证标称指令可以通过,同时又可以抑制高频噪声。
2.4 设计误差稳定调节器
一般TLC的闭环误差稳定调节器采用线性时变状态反馈控制律实现,虽然能够获得沿标称状态的指数稳定,但却是局部的,对具有强不确定性的高超声速飞行器姿态控制系统来说鲁棒性不佳。近年来提出的预测滑模控制方法对非线性干扰具有强鲁棒性,同时能够快速跟踪参考轨迹,本文采用该方法设计误差稳定调节器,同时结合伪动态逆控制器设计了MPSMC-TLC方法,以提高TLC的鲁棒性,调节器设计具体如下。
由式(18)、式(21)可得滤波后慢回路误差调节模型如下:
(24)
根据式(24)采用预测滑模控制方法设计慢回路的误差稳定调节器ωe(k)[17],具体如下:
(25)

ss(k)为慢回路滑模面,具体为
(26)

(27)
式中:λpm=diag(λ1pm,λ2pm,λ3pm),λ1=λ2=λ3=e-(Ts/Tr);Ωc(k)=[αc,βc,μc]T为姿态角指令信号;Ts为期望响应时间。
同理,根据式(6)、式(8)和式(10)可得快回路标称非线性系统及线性误差调节系统如下所示:
(28)
(29)

令wf(t)=Φf(t)pe,将式(29)离散化后为
(30)
与慢回路设计方法相同,根据式(28)可得快回路伪动态逆控制器为
(31)
根据式(30)可得快回路误差稳定调节器为
Mce(k)=(CefGdf)-1((1-qmfpmTssf(k))-
(32)


图2 控制系统结构Fig.2 Structure of the control system
3 稳定性分析
采用Lyapunov第二法分析系统稳定性。将慢回路控制律式(25)代入式(18)可得
(33)
式中:
(34)

定理 1对于慢回路误差调节系统式(18),若:
(35)
则控制器式(25)能保证系统式(18)渐近稳定。其中,
(36)


(37)
整理可得
(38)
取慢回路误差调节系统式(18)的Lyapunov函数的正定二次型为V[eΩ(k)]=eΩ(k)TPseΩ(k),则
ΔV[eΩ(k)]=V[eΩ(k+1)]-V[eΩ(k)]=
eΩ(k+1)TPseΩ(k+1)-eΩ(k)TPseΩ(k)<
(39)
即当满足定理1时,慢回路误差调节系统式(18)渐近稳定。
证毕
同理,将快回路控制律式(32)代入到式(30)中得
(40)

定理 2对于快回路误差调节系统式(30),若:
(41)
则控制器式(32)能保证系统式(30)渐近稳定。其中,
(42)


(43)
整理可得
(44)
取慢回路误差调节系统式(37)的Lyapunov函数的正定二次型为V[eω(k)]=eω(k)TPfeω(k),则
ΔV[eω(k)]=V[eω(k+1)]-V[eω(k)]=
eω(k+1)TPfeω(k+1)-eω(k)TPfeω(k)<
(45)
即当满足定理2时,快回路误差调节系统式(30)渐近稳定。
证毕
4 仿真分析
将文献[10]中TLC方法以及文献[16]中的MPSMC方法与本文的MPSMC-TLC方法进行比较,设置初始姿态角Ω0=[1°,0°,3°]T,指令信号ΩC=[5°,0°,9°]T。舵面偏转角δe,δa,δr,δx,δy,δz限幅±30°。为进一步验证控制系统的鲁棒性,设置气动参数p的摄动范围为150%,同时在快回路输入端加上非线性干扰df=[0.5sint,0.5sint,0.5sint]T,在慢回路输入端加上非线性干扰ds=[0.01sint,0.01sint,0.01sint]T,飞行器及控制器参数分别如表1和表2所示。

表1 飞行器模型参数

续表1
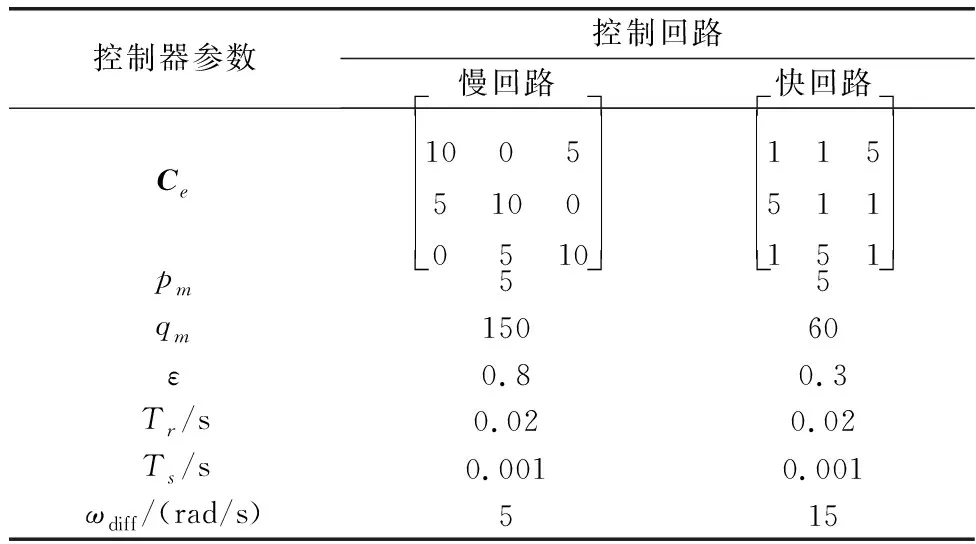
表2 控制器参数Table 2 Controller parameters
仿真结果如图3~图5所示,图3~图5分别为传统TLC方法、MPSMC方法和MPSMC-TLC方法控制下的姿态角、姿态角速率以及舵面偏转角之间的仿真曲线对比图,表3和表4分别展示了3种方法控制下,姿态角和姿态角速率的最大跟踪误差,以及舵面偏转范围。

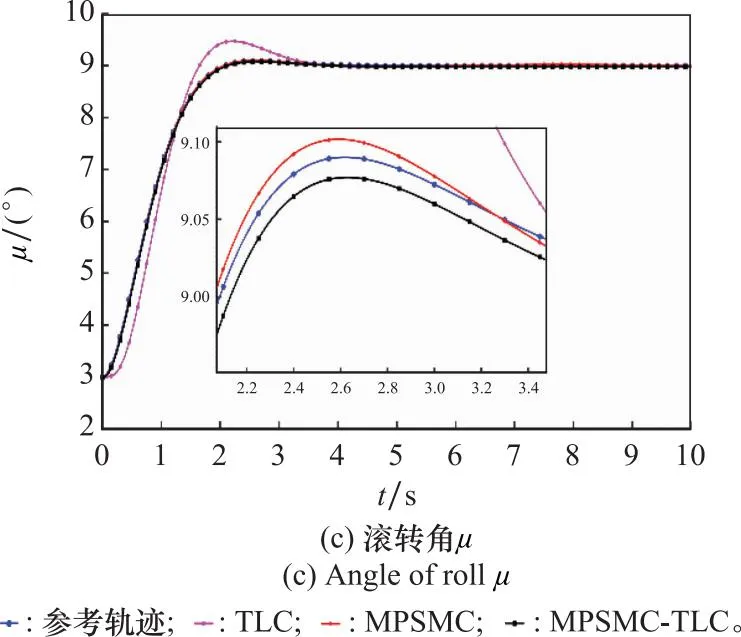
图3 姿态角响应曲线Fig.3 Attitude angle response curve

图4 姿态角速率响应曲线Fig.4 Attitude angle rate response curve


图5 舵面偏转角响应曲线Fig.5 Rudder deflection angle response curve

表3 姿态角、姿态角速率最大跟踪误差Table 3 Maximum tracking error of attitude angle and

表4 舵面偏转范围Table 4 Rudder surface deflection range
由图3、图4以及表3可以看出,受非线性干扰和随机参数摄动的影响,传统TLC方法在姿态角和姿态角速率响应上存在较大的跟踪误差。而MPSMC方法虽然在跟踪误差上较MPSMC-TLC方法相差不大,但由图5和表4不难看出,MPSMC需要更大的舵面偏转来实现姿态指令的跟踪。因此,MPSMC-TLC方法在实现跟踪误差较小的同时,对舵面的需求也较小。同时也可看出,上述方法并未解决随机参数摄动导致的信号频繁震荡的问题,尤其在姿态角速率和舵面偏转角响应上表现得比较明显。因此,本文进一步利用扩展卡尔曼滤波器对受随机参数摄动影响的状态进行滤波。图6~图8分别展示了MPSMC-TLC方法与MPSMC-EKTLC方法控制下姿态角、角速率以及舵面偏转角的响应曲线。表5和表6分别展示了两种方法控制下,姿态角和姿态角速率的最大跟踪误差,以及舵面偏转范围。

图6 姿态角响应曲线Fig.6 Attitude angle response curve

图7 姿态角速率响应曲线Fig.7 Attitude angle rate response curve
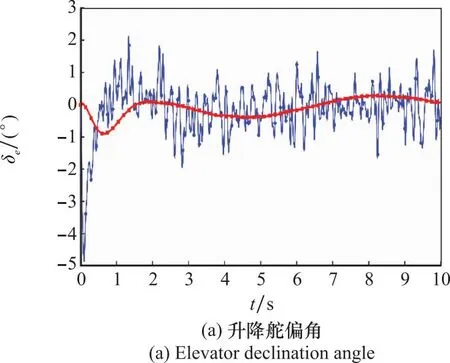


图8 舵面偏转角响应曲线Fig.8 Rudder deflection angle response curve

表5 姿态角、姿态角速率最大跟踪误差Table 5 Maximum tracking error of attitude angle and attitude angle rate

表6 舵面偏转范围Table 6 Rudder surface deflection range
从图6~图8以及表5、表6可以看出,MPSMC-EKTLC方法的响应曲线更为光滑,有效减弱了参数随机摄动引起的频繁振荡现象,且姿态角和姿态角速率的跟踪误差更小,对舵面偏转的需求也进一步减弱。仿真对比结果表明,本文所提方法能够使响应快速趋于稳定,且对非线性干扰和随机参数摄动都具有较强的鲁棒性。
5 结束语
本文针对高超声速飞行器存在模型参数随机摄动和非线性干扰情况下的姿态控制问题,提出了一种MPSMC-EKTLC方法。该方法利用轨迹线性化的方式建立高超声速飞行器快慢回路线性不确定性误差调节模型,利用扩展卡尔曼滤波器估计出期望的误差状态,最后采用预测滑模控制方法设计误差稳定调节器,同时结合伪动态逆控制器实现对高超声速飞行器良好的跟踪控制。研究结果表明,所提方法在气动参数发生随机摄动的情况下,仍能够使高超声速飞行器姿态稳定、快速地跟踪控制指令,对随机参数摄动和非线性干扰都具有强鲁棒性。同时,本文所提方法仅适用于参数摄动对控制系统影响是线性的情况,通过泰勒展开就能够获得近似的误差协方差矩阵,并且可以很容易在线执行。但针对于一些强非线性的情况,本文所提方法还需要进一步的改善,这也是本文下一步的研究方向。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
兵器装备工程学报(2021年12期)2022-01-11
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
小哥白尼(趣味科学)(2018年5期)2018-06-21
项目管理技术(2016年12期)2016-06-15