基于数字孪生技术的开关操作箱二次虚回路故障精准定位方法
2024-02-22 09:48孔令斌张鹏望
科学技术创新 2024年3期
孔令斌,张鹏望,张 静
(中国南方电网有限责任公司超高压输电公司大理局,云南 大理)
引言
开关操作箱是电力系统关键的一种辅助装置,主要的作用就是针对电气设备进行维护和控制。二次虚回路故障是开关操作箱实际运行过程中较为常见的一种故障类型,其覆盖范围广、影响力大,如果不及时做出维护处理,会影响电力系统的稳定运行。参考文献[1]和文献[2]中分别设计了基于图神经网络的二次回路故障定位方法、基于ER 算法的二次回路故障定位方法。二者虽然可以实现预期的定位目标及任务,但是整体的效率较低,此外,传统的定位方法大多设定为单向形式,定位结果易出现误差[3]。为此,提出基于数字孪生技术的开关操作箱二次虚回路故障精准定位方法。
1 设计开关操作箱二次虚回路故障数字孪生定位方法
1.1 明确二次虚回路故障特征
二次虚回路故障主要是由电气元件、电缆、电路以及端子排等异常导致的,逐步扩大为不可控的故障问题,所以特征的提取也需要结合上述的因素。可以先在二次回路的导线中设置一定数量的监测节点,进行实时数据、信息的采集。随后,当出现故障问题时,对开关操作箱的运行状态进行分析,这部分主要包括电流、电压、电阻等大幅度变化,具体的特征表现见表1。

表1 二次虚回路故障特征表
1.2 设计多元件自检告警BPA 定位结构
传统的开关操作箱二次虚回路故障告警定位结构多设定为单向形式,告警的速度较慢,导致维护不及时,故障的范围增大,此次采用多元件自检告警的方式,利用BPA 框架实现故障定位结构的设计。先结合实际的故障定位需求,设计对应的自检告警BPA定位结构,见图1。
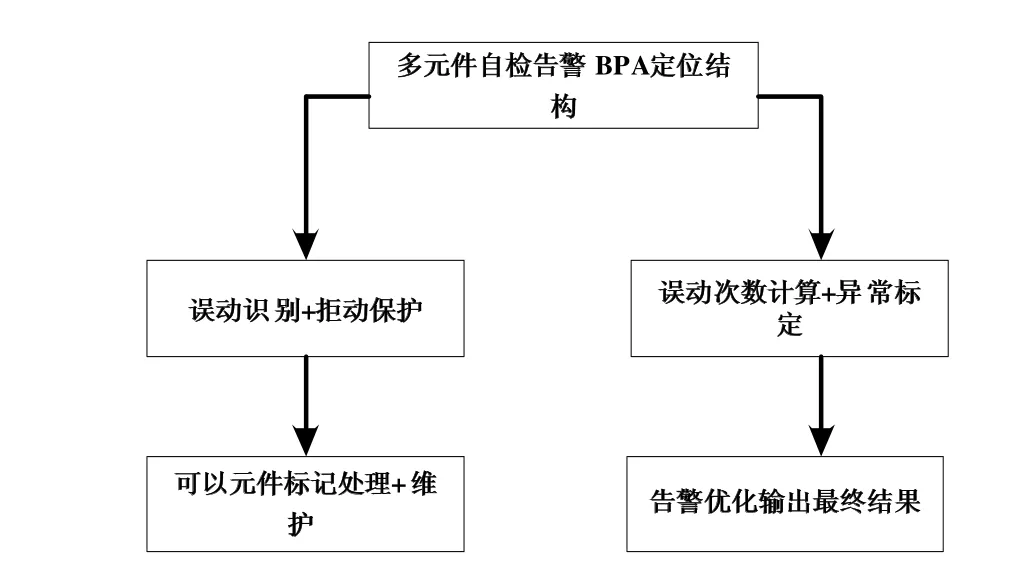
图1 多元件自检告警BPA 定位结构图示
基于故障定位的要求,设置自检告警的结构的保护定位标准。
在发生故障时:
(1) 分析开关操作箱二次虚回路处于拒动还是误动状态。
(2) 发生故障时,结合元件自检告警状态,缩小故障的定位范围,统计拒动(误动)关联数据。
(3) 发生故障时,结合BPA 框架,测算出可以元件的举证值,进行前后标准的比对,获取故障数据。
结合上述设定的自检告警的保护定位标准,当前开关操作箱二次虚回路出现故障,结合数字孪生技术,针对多元件先进行自检告警BPA 定位分析处理,针对过程中存在的实际故障情况,不断缩小实际的异常位置以及区域,为后续的故障定位奠定基础条件。
1.3 构建数字孪生开关操作箱二次虚回路故障定位模型
结合数字孪生技术,构建开关操作箱二次虚回路故障定位模型。当前先利用上述设计的自检告警的保护定位标准,对操作箱出现故障的位置进行模糊标定,同时获取对应的数据、信息。随后,通过数字孪生技术,在初始的模型中建立故障定位的映射,在合理的可信度范围之内,针对故障集合进行举证处理,并明确当前的故障范围,如下所示:
式中,K 表示模型识别的故障范围,ΔU 表示定向故障感应差值,η 表示感应定位次数,S 表示覆盖范围,T表示重复定位次数。结合当前测试,实现对模型识别的故障范围的计算。基于此范围的变化,调整模型的识别定位区域,结合数字孪生技术,改变对应的映射条件,形成完整的模型定位结构,见图2。
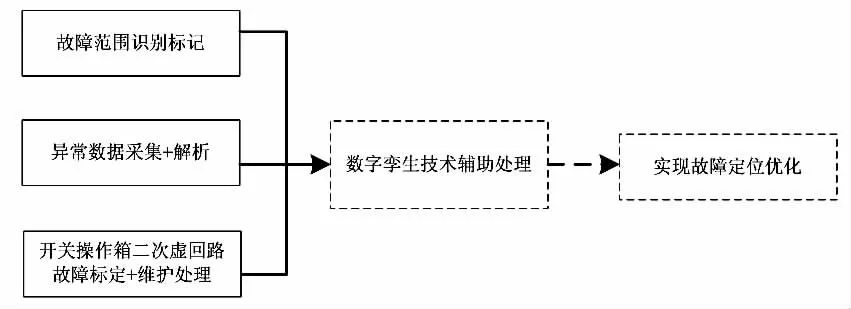
图2 数字孪生开关操作箱二次虚回路故障定位模型图
结合图2,实现对数字孪生开关操作箱二次虚回路故障定位模型流程的设计。通过数字孪生技术的辅助,在不同的映射条件下,结合定位需求,改变对应的故障识别定位目标,降低定位误差的冲突概率,确保定位结果的真实可靠,进一步强化模型的故障定位能力。
1.4 举证测验处理实现故障定位
开关操作箱二次虚回路形成的故障范围一般较大,关联问题也较难控制,各虚回路常常会出现交叉、重叠的故障状态。针对当前的故障元器件,结合数字孪生技术,设置故障定位的举证规则,具体如下:当举证值为0 时,元器件状态处于稳定,当举证值大于0时,操作箱中的元器件A 与元器件B 进行矩阵,一般形成的举证值1~2,说明当前的开关操作箱存在故障情况,需要通过模型进行辅助定位识别,进行多维测验分析,获取最终的故障定位结果。
2 方法测试
此次主要是对基于数字孪生技术的开关操作箱二次虚回路故障精准定位方法的实际应用效果进行分析与验证研究,考虑到最终测试结果的真实性与可靠性,采用对比的方式展开分析,选定G 电力系统作为测试的主要目标对象,参考文献设定传统图神经网络开关操作箱二次虚回路故障定位测试组、传统ER算法开关操作箱二次虚回路故障定位测试组以及此次所设计的数字孪生开关操作箱二次虚回路故障定位测试组。结合当前设置,对最终得出的结果比照研究,接下来,基于数字孪生技术,进行初始测试环境的搭建。
2.1 测试准备
结合数字孪生技术,对选定的G 电力系统内部的开关操作箱的故障情况测试环境进行关联搭建处理。首先,进行在控制程序中设定一个MU 合并单元,接入母差线路保护装置,连接智能终端,设计一个智能化的控制程序。标定出物理光纤回路,形成基础性的智能保护监测。其次,设定该开关操作箱二次回路共11 个元件,12 条线路,A1-A12 是二次回路中的12条虚回路。
当前可以先明确故障识别定位的覆盖范围,并将12 条虚回路划分为6 个测试区域,每一个区域部署一定数量的监测节点,节点之间互相搭建,形成循环性的监测结构。基于当前的故障定位需求,设置测试控制指标与参数,见表2。
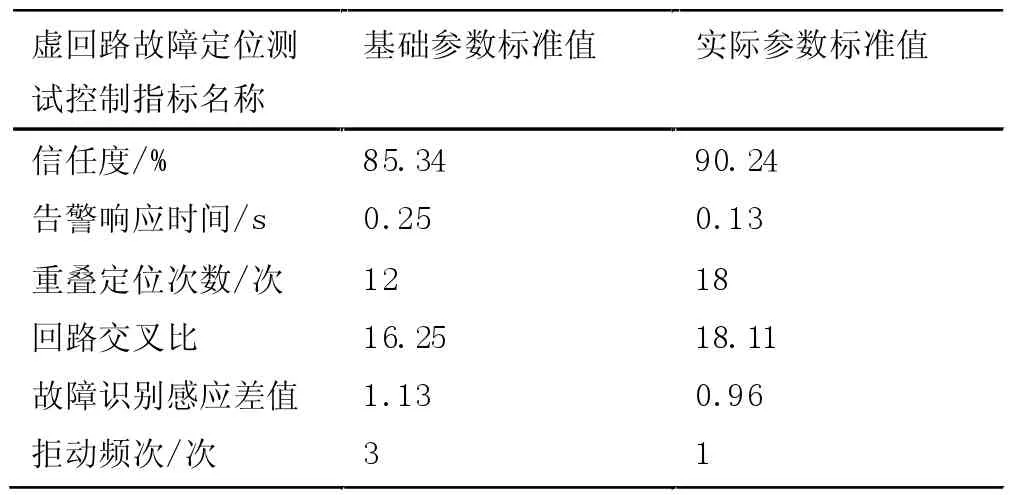
表2 虚回路故障定位测试控制指标与参数表
结合表2,实现对虚回路故障定位测试控制指标与参数的设置与调整。随即,结合数字孪生技术,相对当前开关操作箱的基础数据、信息进行采集,汇总之后,以待后续的比对应用。接下来,在当前的故障识别定位装置中设置统一型号的传感器,便于实时信息、数据的周期性采集,建立稳定的孪生测试环境。
2.2 测试过程及结果分析
在上述搭建的测试环境之中,结合数字孪生技术,对开关操作箱二次虚回路故障精准定位方法进行具体测试和验证分析。首先,可以在控制程序中建立一个物理模型,并依据开关操作箱的运行,设计一个辅助性的仿真程序。制定虚拟化的故障测试指令,共12 条,每一条的故障指令形成的二次虚回路虚拟性测试故障均是不同的,这样做的目的在于确保最终故障定位结果的真实性与可靠性。其次,在虚拟空间中构建故障识别映射,同时提取同周期开关操作箱二次虚回路的故障特征信号,并设定数字孪生动态感知故障定位的测试原理,具体见图3。

图3 数字孪生动态感知故障定位测试原理结构图示
结合图3,实现对数字孪生动态感知故障定位测试原理结构的设计与实践性分析。随后,以此为基础,将制定的虚拟故障测试指令导入当前的测试环境之中,按照顺序执行指令,结合数字孪生技术,先对当前的故障位置进行感应识别,实现故障告警,过程中结合数字孪生技术,依据实际的通信状态,对虚回路故障元器件进行举证,测算出对应的举证值,如下所示:
式中,D 表示故障回路举证值,K 表示异常覆盖范围,n表示可识别区域,n 表示告警次数,o 表示重复识别区域。结合当前测试,得出故障回路举证值,结合当前各个阶段故障回路举证值的变动,判定实际的故障程度,并缩小故障的定位范围。举证值过小,说明故障的范围较小,反之,举证值较大,对应的故障范围相对较大。结合各个周期的矩阵值变动情况,利用专业的设备故障异常数据,并结合数字孪生技术,进行二次故障定位,同时计算出当前故障定位误动次数,如下所示:
式中,N 表示故障定位误动次数,Q 表示故障关联范围,D 表示定位重复感应次数,k 表示转换比,w1和w2分别表示基础定位区域和重复定位区域。结合当前测试,实现对测试结果的比对分析,见表3。

表3 测试结果对比分析表
结合表3,得出以下结论:针对选定的6 个测试区域,对比于传统图神经网络开关操作箱二次虚回路故障定位测试组、传统ER 算法开关操作箱二次虚回路故障定位测试组,此次所设计的数字孪生开关操作箱二次虚回路故障定位测试组最终得出的故障定位误动次数被控制在5 以下,说明在数字孪生技术的辅助下,所设计的故障定位方法更具针对性,具有实际的应用价值。
结束语
综上所述,便是对基于数字孪生技术的开关操作箱二次虚回路故障精准定位方法的设计与实践性分析,与初始的开关操作箱二次虚回路故障精定位形式相比对,此次结合数字孪生技术,设计更为灵活、多变的辅助故障识别、定位结构,大幅度缩短电力系统的故障排查时间和维护时间,加强对设备损坏风险的把控,提高故障定位处理的准确性和效率。与此同时,在数字孪生技术的辅助支持下,定位的范围也得到了扩展延伸,在复杂的环境下,系统也可以精准识别到具体的故障位置,获取对应的异常数据、信息,推动相关技术与行业迈入一个新的发展台阶。
猜你喜欢
幽默大师(2020年11期)2020-11-26
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
创新作文(5-6年级)(2018年11期)2018-04-23
知识经济·中国直销(2018年3期)2018-04-12
南风窗(2016年19期)2016-09-21
学习月刊(2015年1期)2015-07-11