机载激光雷达在房地一体地形测绘中的应用
2024-02-22 09:48胡开桂
科学技术创新 2024年3期
胡开桂
(广西壮族自治区国土测绘院,广西 南宁)
1 技术背景
激光雷达(LiDAR)测量技术是集成了激光测距系统、全球定位系统(GPS)和惯性导航系统(INS)三种技术于一身,获取高时空分辨率的地球空间信息的一种全新技术手段。是一种利用激光反射和时延分析建立精确地表模型的精密地形测量技术,主要依赖光探测和测距来测量高程数据,根据激光脉冲和反射测量以确定高度。激光雷达测绘采用激光发射和探测技术、扫描和控制力学、全球定位系统和惯性测量单元(IMU),计算目标反射面的精确XYZ 坐标,具有垂直精度高、数据效率高等优点。激光雷达按照搭载平台的不同,分为机载模式,车载模式,背包模式。
2 技术路线
基于无人机LiDAR 测量系统的地形测量主要作业流程包括项目踏勘、项目设计、无人机航线布设、实地外业航测实施(LiDAR 数据采集和影像获取)、地面控制测量实施、内业POS 解算、空三数字加密解算、点云数据处理、影像数据处理、数字高程模型DEM生产和正射影像DOM生产、地形地物要素采集、地形图等高线数据绘制、地形图整饰及精度检查等,其流程见图1。
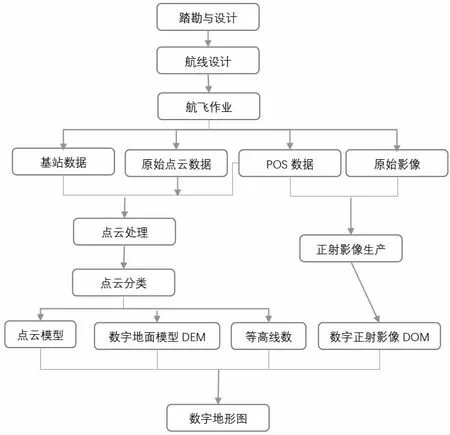
图1 作业流程图
3 作业应用
以广西壮族自治区梧州市岑溪市城谏镇大新村房地一体项目为例。
3.1 实地现场踏勘
现场踏勘作业,需要结合实验区域具体的实际情况,查清测区内部的通信塔、高压塔以及高大建筑物,并进行综合考虑,采取有效措施合理规避其对飞行和数据获取的干扰问题,保障飞行作业的安全和数据获取的顺利进行。在开展实际生产施工操作的前期阶段,需要从改项目去的房地一体测量范围入手,对测区的地形地貌资料及当地影像资料收集分析,确定无人机的飞行范围并计算航飞高度等,促进实地现场踏勘作业的顺利实施。
在开展现场踏勘作业时,应与当地区域的相关主管部门保持联系,在当地公安部门的帮助下,确保现场勘探人员能够与相关行政主管单位进行协调,确保现场踏勘工作能够顺利实施。在现场踏勘作业的实施阶段,应提前掌握无人机的飞行范围以及确定航飞路线,为测区项目制定明确的作业任务,确保无人飞机起降点筛选合理和保证GNSS基站建设得到落实。在无人机载激光雷达系统的运行过程中,保障测绘作业的安全性。
3.2 点云数据获取
首先,需要结合现场条件,保障区域筛选的合理性,基站架设作业的实施阶段,为其提供充足的基础支持。同时,应加大对基站架设作业的控制力度,保障架设半径设置的科学性,使其能够保持在5 km左右。卫星观测角度设置应控制在15°左右,且观测卫星的总量,大于18 颗以上。通过对基站采样率分析,可得最佳采样率应保持在5 Hz左右。当信号发射塔远离基站时,应将两者之间的距离控制在200 m 以上,且高压线应控制在50 m以外。待基站架设作业完成后,需要采用2 次测定形式,采用间断测定的方法,及时获取与基站大地相关坐标信息,通过计算平均值,在基站点的设置过程中,将其作为基础坐标。
其次,在数据采集作业的实施过程中,待飞行参数设置作业完成后,应合理应用手持软件,获得更加完善的数据采集信息。通过分析设备的性能参数,在综合考虑的基础上,从实验区域出发,加大对激光线速度的控制力度。在一般情况下,应将其设置为120 线/s,且激光点的频率应保持在550 kHz左右,将最大测距标准控制在300 m 左右。对于起始角的角度来说,应将其设置为106°,而中直角则需要保持在254°左右。在开展数据采集作业的过程中,应严格按照前期阶段的航线规划要求,将数据采集做的时间控制在20 min 左右,顺利完成试验区数据采集作业任务。
最后,在无人机外业数据采集作业完成后,应在后续整合阶段,确保无人机能够准确降落,并对降落后无人机设备的运行状况予以检查,提出有针对性的维护措施,避免对无人机带来损伤。在降落阶段,还应检查无人机的数据,确保无人机能够全部回收,对数据信息进行备份处理。
本项目数据采集使用曜宇Yunux-Long120 无人机搭载中海达ARS-1000L 激光测量系统进行数据获取,主要获取的数据有点云数据、影像数据和POS 数据等原始数据,同时采用测量型GNSS接收机对测区进行高程检查点采集和基站数据的采集。按照农村房地一体项目相关规范要求,正射影像地面分辨率优于0.05 m,点密度500-600 个/平方米,相对航高130 m,航向重叠度为55%,旁向重叠度为70%,采用编制的航测参数计算软件计算出外业飞行参数。实现全村房屋范围地形全覆盖测绘。本测区获取的原始数据有点云数据、pos 数据、影像数据以及基准站静态GNSS数据等,见图2。

图2 曜宇Yunux-Long120 无人机和中海达ARS-1000L激光测量系统
3.3 点云数据生产
在完成数据采集作业后,需要及时将相关数据信息导入到电脑系统中,并借助专业化的软件形式,对激光雷达系统数据进行处理,促进预处理工作顺利实施。将业内数据处理环节进行细致划分,通常是以定位定姿系统位置解算和点云解算这两个阶段为主。
一方面,通过对定位定姿系统位置解算阶段加以分析,可以看出需要结合基点数据的实际情况,将其与移动站GPS 数据IMU 数据以及里程计数据进行整合,形成完整的组合形式,促进解算作业的顺利实施,确保所输出的定位定姿数据能够具备精准性。此外,使用专业的处理软件,为数据处理工作的开展提供支持,形成完善的导航信息组合,确保信息内容的精准性。
另一方面,在点云解算阶段,应结合无人机在激光雷达系统实际情况,结合多个传感器的测量数据,形成完善的数据配准模式,加强各项数据之间的融合力度,进一步分析被测目标情况,结合三维几何空间坐标,对相关属性予以充分还原。另外,使用专业软件对采集阶段的原始数据予以妥善处理。采用融合处理生成点云文件信息,将此类数据信息应用于其他系统软件中,促进后续数据处理作业的有序进行。
本项目点云数据的处理主要对航摄获取的原始数据进行POS 解算、点云融合、点云滤波和点云分类等工作。
LiDAR 数据的处理主要步骤分为3 步,POS 解算、点云融合和点云后处理。3 个步骤分别在Inertial Explorer 8.70、HDDataCombine 海达融合软件、Terrasolid软件中完成。LiDAR 原始数据记录的脉冲发射角度、脉冲发射与返回时间、脉冲返回强度、回波的次数等信息,在海达融合软件中加载激光原始数据RXP 文件及航迹文件,设置系统检校参数、坐标变换矩阵,根据激光点反射率及距离进行粗滤波过滤噪点,并将其转换为LAS 点云通用格式文件,最后在Terrasolid 软件中进行点云精分类获取高精度着色地面点数据,采用Terrasolid 软件进行点云质量检查,主要检查以下几点:(1)点密度检查;(2)航带相对误差检查;(3)绝对精度检查。
正射影像的数据处理采用Pix4dMapper 软件生产。主要步骤有:(1)新建工程,导入影像、POS 数据,设置相机参数;(2)自由网平差,控制网平差,优化处理;(3)生成密集点云;(4)生成DSM成果;(5)生成DOM成果。
生产成果主要有点云数据成果(图3)、数字高程模型DEM及等高线(图4)、数字正射影像DOM。

图3 点云成果

图4 DEM成果(叠加等高线)
3.4 EPS软件三维点云测图
在房地一体测绘作业的实施过程中,为了保证最终测绘结果的精准程度,需要在采集数据的过程中,对点云高程切片进行调整,保障房屋边点云数据的清晰程度,为采集作业的顺利实施提供充足的数据支持。在全面检查点云数据的过程中,应严格按照地籍测图作业的规范要求,对点云数据进行全面转换,使其能够形成以矢量测图软件的格式,通过对数据的全面加载,完成阶段性的数据采集任务。
对于部分缺乏清晰性的边线和房角来说,应按照具体要求,结合内业测图进行处理,要求外人员能够结合每一条房边,促进外业勘丈工作的顺利实施。不仅如此,还需要在房屋测绘数据采集作业中,以按边采集的方式,对无法确定的房角进行标记,保障标记的清晰性与明确性,及时返回外业核查作业阶段。与此同时,还需要对图面进行检查,若出现遗漏或者错误等情况时,还应对错误环节予以修改。
本项目测图采用EPS2016 测图软件对生成的点云数据(las 格式)转化为.pcd 格式数据进行导入,在点云高程切片视图中采用多点交会法和直接从点云采集房屋边线的方法成图(如图5),加载正射影像数据进行平面地物的矢量化。利用EPS成图系统将等高线和地形矢量图进行拼接,生产要素完整的符合规范要求的房地一体地形图,图内各要素及地物符号严格按照图式规定进行绘制编辑。最终得到房地一体地形图数据成果。

图5 地物绘制
4 精度检查
对于本测量任务区来说,在顺利完成作业后还需要采用人工检查核对的方法,以人机交互的检查形式对实验区的测图成果进行检测,对间距精度加以验证,确保点位设置的精确性,满足房地一体测绘作业的质量要求。
一方面,应保障点位的精准度。通过分析外业实测数据,并对点云数据予以综合考虑,全面对比实际所采集的图形数据,合理应用数据抽检方法,以人工检查形式为主,仔细核对信息对比结果,发挥出人机交互检查方式实效性,从实验区域出发,形成优质的测图检测质量。
另一方面,应结合外业踏丈距离,将其与内业出图标注距离进行对比,在全面验证的过程中,可以看出部分边长能够保持在1 cm~2 cm的区间范围内,且间距的精准程度能够满足1.5 cm的标准,并且符合房地一体测绘作业要求。
房地一体项目规范对高程精度要求为优于0.15 m,要求较低,本次实例不对高程精度做检查。平面精度检测采用外业实测方法,实测13 个检查点,点云精度平面中误差为0.065 m,优于房地一体规范的0.075 m,满足房地一体地形图的要求。检查成果见图6。
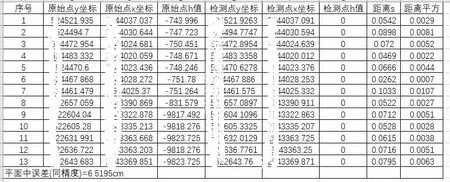
图6 平面精度检查表
5 结论
机载LiDAR 系统获取地面三维数字数据具有全天候高精度、高机动性和低成本等优点,在各行业中都具有广泛的应用前景,通过本次案例和精度分析可以得到如下结论:(1) 数据产品丰富:数字表面模型(DSM)、正射影像(DOM)、数字高程模型(DEM)、数字线划图(DLG)。(2) 成果精度高:机载激光雷达技术能够获取到大量高精度地形表面数据,而且数据精度高,可以满足应用需求。(3) 约束条件少:激光雷达可穿透茂密植被的缝隙直达地面,不受光照和阴影的限制。(4) 生产效率高:应用机载激光雷达技术可以快速获取到大范围、大区域内的地表信息和空间信息,无需布设大量像控点和检查点,极大减少了外业工作量,缩短作业时长,快速完成项目作业。
结束语
无人机载激光雷达系统在房地一体测绘作业中能够保障点云数据的精准程度,在矢量测图软件的共同作用下,完成阶段性的房地一体化测绘生产实验任务。在使用无人机载激光雷达系统时,不仅能够满足精确度等方面的要求,还可以在提高回波技术的应用频率,使其能够顺利穿透植被,并且解决覆盖度等方面的问题,获得更加精准的测量结果,发挥出无人机载激光雷达系统的应用优势,在房地一体测绘精度、成本以及工期等方面得以体现。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
西部交通科技(2021年9期)2021-01-11
中国交通信息化(2019年1期)2019-03-26
智能建筑与智慧城市(2018年11期)2018-11-28
电子制作(2018年16期)2018-09-26
新教育(2018年8期)2018-08-29
中国资源综合利用(2017年2期)2018-01-22
当代贵州(2017年49期)2017-12-19
世界汽车(2016年8期)2016-09-28