基于路面识别的自适应天地棚混合控制算法研究
2024-02-23 01:38赵剑桥
汽车与驾驶维修(维修版) 2024年1期
赵剑桥
(青岛大学机电工程学院,青岛 266071)
0 引言
传统减振器因自身结构的限制,无法满足车辆对乘坐平顺性与操纵稳定性的需求[1]。主动悬架制造工艺复杂,能量消耗大。半主动悬架较主动悬架结构简单,工作几乎不消耗动力,因此成为悬架领域内的研究热点[2],而半主动悬架控制系统中切实可行的控制算法正是发挥其优势的关键[3]。在半主动悬架控制算法中,Crosby和Karnopp提出了天棚控制策略[4],它主要应用于改善车辆平顺性[5],而地棚控制主要用于减少轮胎动载荷[6]。Yao等通过应用将二者优势互补的天地棚混合控制算法,可以同时对车辆的平顺性与操纵稳定性进行改善[7]。
国内同样有大量学者对半主动悬架算法做出了很多研究,郭孔辉等针对混合阻尼控制进行了大量的仿真实验以确定合适的仿真系数,以此来提高悬架的综合性能[8]。熊开洋等设计了混合天棚地棚(Hybrid Skyhook and Groundhook, HSG)控制策略,在保持操纵稳定性的同时,也能获得车辆平顺性能的提升[9]。江洪等磁流变减振器为研究对象,分析了天地棚混合控制算法中加权系数的影响,通过选取合适的加权系数大大地提升了车辆的综合性能[10]。
但以上研究并未充分考虑车辆运行工况的实时变化,单一确定的控制参数往往难以适应现实中复杂的工况,因此许多学者通过选择对不同路面的识别并通过识别到的结果来改变相关控制参数,以此来适应路面激励条件的变化。秦也辰基于自适应神经模糊网络和数据组处理方法的系统识别结构提出了一种路面等级识别的算法[11]。陶振兴基于单目相机图像研究视觉路面识别技术,同时搭建了路面分类模型与典型路面识别模型来实现对不同类型路面的识别[12]。巩明德等通过建立T-S型模糊控制规则识别不同路面的粗糙度,以达到路面识别的目的[13]。
在考虑算法的复杂度及其实用性等因素后,本文首先分析了经典控制算法中天棚控制算法与地棚控制算法的优缺点。由于上述两种算法并不能同时改善车辆的平顺性与操纵稳定性,因此选择了天地棚混合阻尼控制算法。而在考虑固定不变的天地棚分配参数无法满足车辆实际运行工况的实时变化,所以通过选择一种根据路面频率识别自适应的天地棚混合算法,来提高车辆参数的自适应调节能力,并利用一阶过零点穿越法的频率估算实现了路面的频率识别。最后,在扫频路面与随机路面激励下进行了仿真对比实验,验证了自适应的天地棚混合算法的半主动悬架在改善车辆的平顺性与操纵稳定性的有效性。
1 系统模型的建立
1.1 二自由度半主动悬架模型
基于车辆的垂向振动,以牛顿第二定律为依据,可建立二自由度半主动悬架的系统动力学模型。该模型虽未对车身的侧倾与俯仰进行考虑,但包含了车身垂直振动、车轮动载荷等车辆主要特征[14],常用于车辆垂向振动性能的研究(图1)。
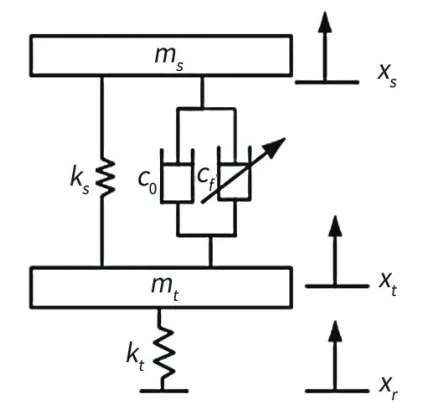
图1 二自由度1/4半主动悬架
在上述动力学模型的基础上,可建立1/4半主动悬架的系统动力学方程组如下所示:
式中:ms为簧载质量的数值,单位kg;mt为非簧载质量的数值,单位kg;c0为悬架基础阻尼的数值,单位N/(m/s);cf为可调阻尼系数的数值,单位N/(m/s);ks、kt为悬架刚度系数的数值,单位N/m;xs为簧载质量位移的数值,单位m;xt为非簧载质量位移的数值,单位m;xr为路面激励输入的数值,单位m。
1.2 扫频路面模型
扫频工况是研究车辆垂向振动响应的常用工况,路面的激振频率对车辆的垂向减振性能有极大的影响。本文所设计的扫频路面激励信号的频率随着时间的增大而线性递增,且为确保轮胎与路面的接触性,路面激励的幅值随时间增大而递减,其表达式如下:
式中:xr(t)为路面垂向位移的数值,单位为m;ω为时间角频率数值,单位rad/s;v为车速数值,单位m/s;k为系数,无量纲;A0为初始路面振幅的数值,单位m。
1.3 随机路面模型
随机路面是最接近车辆实际运行工况的路面条件,考虑到路面输入在时间域是非平稳的[15],因此采用四轮非平稳时域路面模型。其表达式如下:
式中:nc为空间截止频率的数值,单位m-1;n0为标准空间频率的数值,单位m-1;G0为路面不平度系数,无量纲;ω(t)为高斯白噪声,无量纲;d为轮距的数值,单位m;l为车辆轴距的数值,单位m;x1、x2为状态变量,无量纲。
2 自适应控制策略研究
2.1 路面频率识别
因路面激励的频率输入与悬架振动的频率有较强的相关性[16],可通过采集减振器垂向振动的频率来替换路面激励输入的频率。本文通过采用一阶过零点穿越法对频率进行估算,该算法的有限状态机模型如图2所示。该方法是将悬架垂向振动过程中连续3次速度为零的所经过的时间作为1个周期,并通过线性插值法计算零点距上一采样点的时间间隔。其中T1、T2与T3是利用线性插值法计算的各自零点与前一个采样时间所经过的时间;n1、n2与n3记录各个零点所经过的采样次数;v1与v2代表减振器垂向速度;frequency则代表该模型输出的当前识别的路面频率。

图2 路面频率识别模型
为验证上述的路面频率识别模型,通过建立0~15 Hz递增的扫频路面,并利用该路面频率识别模型进行频率识别,试验结果如图3所示。由图可知,模型的辨识结果与路面激励输入的频率基本符合。
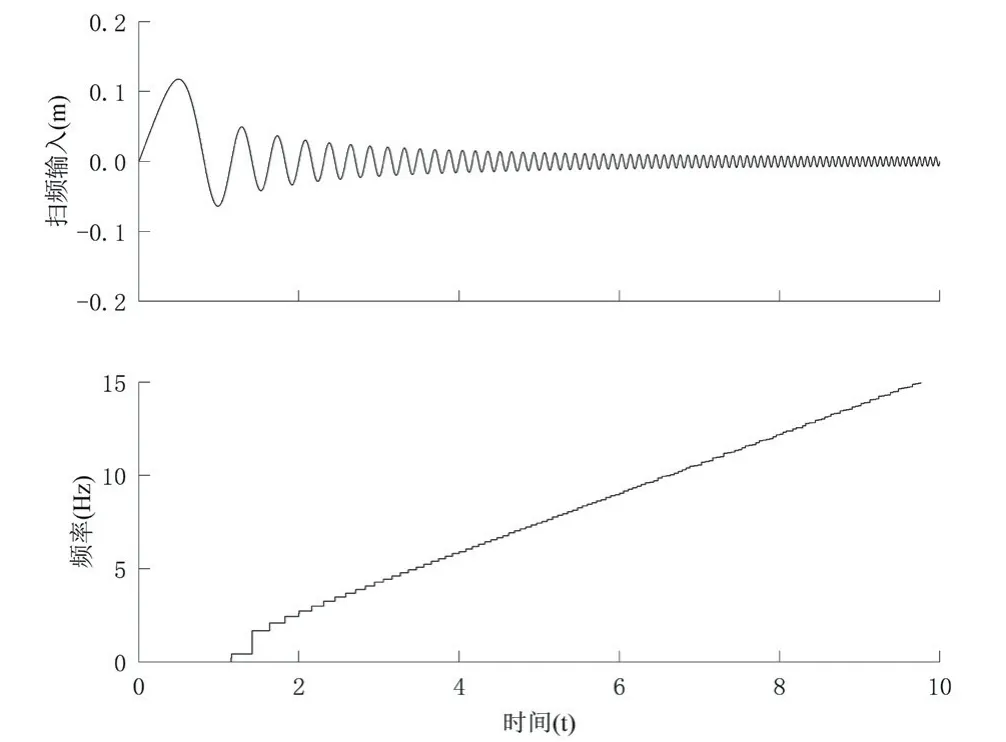
图3 对扫频路面的识别结果
2.2 自适应SH-GH控制算法
2.2.1 天棚控制算法原理
天棚控制算法是以降低车身加速度为目的的控制算法,在半主动悬架领域有广大的应用。它假设车辆的上方与一个虚拟的阻尼器相连,而实际情况中,并不存在这样的天棚。在半主动悬架系统中,减振器安装在车身与车轮之间,通过可调阻尼减振器的减振系数变化来实现天棚控制。其虽对降低车身振动有显著效果,但是会增大轮胎动载荷,恶化了车辆的操纵稳定性。其阻尼力公式如下:
式中:Fsky为天棚阻尼力的数值,单位N;csky为天棚阻尼系数的数值,单位N/(m/s)。
2.2.2 地棚控制算法原理
地棚控制算法与天棚控制算法的思路类似,假设一个虚拟的减振器将车轮与地面相连,而其控制效果与天棚控制算法相反。地棚控制可以有效地抑制轮胎动载荷,却会恶化车辆的平顺性。其阻尼力公式如下:
式中:Fground为地棚阻尼力的数值,单位N;cground为地棚阻尼系数的数值,单位N/(m/s)。
2.2.3 SH-GH控制算法原理
考虑到天棚控制与地棚控制分别只能改善车辆的平顺性与操纵稳定性,因此可以将二者的原理相结合。天地棚混合控制实现了天棚控制与地棚控制优势互补的新型半主动悬架控制算法,该算法利用加权系数α调节天棚控制与地棚控制的比例。当加权系数α为1时,混合控制算法等同于天棚控制算法;当加权系数α为0时,混合控制算法等同于地棚控制算法。其公式如下:
式中:Ff为天地棚混合控制阻尼力的数值,单位N;α为加权系数,无量纲。
2.2.4 自适应SH-GH控制算法
上述的天地棚混合控制算法的参数是固定的,并未考虑车辆系统的非线性特性,因此难以抑制路面实时变化所产生的扰动。同时考虑到当路面激励频率在1~2 Hz的低频段时接近车身的共振频率,车身振动幅度较大;而在10 Hz附近的高频段约为车轮的共振频率,车轮的振动幅度较大[17]。因此,在传统天地棚混合控制的基础上,增加了根据路面频率自适应变化的增益系数λsky与λground。其表达式如下:
式中:λsky、λground分别为天棚控制与地棚控制的自适应增益系数,无量纲。
上述算法的控制思路为:当路面激励为0~4 Hz的车身敏感频带时,此时应更多考虑车辆的平顺性,需适当增大λsky的数值,同时提高α的值,以增加天棚控制力的权重,从而提高车辆的平顺性。当路面激励为8~12 Hz附近的车轮敏感频带时,应当适当减小α的值,并同时增加λground的数值,来提高地棚控制力的比例,以使车辆获得更好的操纵稳定性。当路面激励为4~8 Hz或大于12 Hz时,则应当综合考虑车辆的综合性能,减小系统受到的冲击,λsky、λground与α取适中的值。
3 仿真验证与结果分析
为验证自适应SH-GH半主动悬架系统控制策略的有效性,需要进行仿真对比的研究。通过建立C级随机路面以及0~20 Hz的扫频路面作为路面激励。车辆行驶速度选择为72 km/h,并以车身垂向振动加速度与轮胎动变形分别作为车辆平顺性和操纵稳定性的评价指标。比较经过自适应SH-GH控制的半主动悬架以及无控制的被动悬架性能曲线变化,如图4和图5所示。
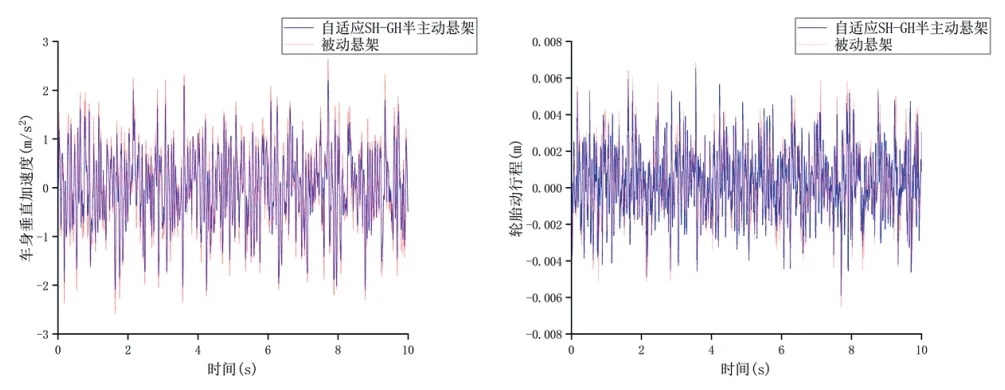
图4 随机路面下各评价指标对比曲线

图5 扫频路面下各评价指标对比曲线
仿真结果表明,配有自适应SH-GH控制器的半主动悬架的车身垂向加速度(Sprung Mass Acceleration,SMA)与轮胎动变形(Dynamic Tyre Deformation,DTD)的均方根值均有不同程度的下降,具体数值如表1所示。在随机路面条件下,SMA均方根值下降14.52%,DTD均方根值下降5.26%;在扫频路面条件下,SMA均方根值降低16.35%,DTD均方根值降低10.5%。上述数据表明,配置有自适应SH-GH控制算法的半主动悬架算法较被动悬架同时改善了车辆的平顺性与操纵稳定性。

表1 有无自适应SH-GH控制的悬架性能对比
4 结束语
本文以1/4悬架为研究对象,并搭建了随机路面与扫频路面的路面激励模型。在分析了天棚控制算法与地棚控制算法的优劣势并考虑到车辆运行工况的时变性后,采用了自适应SH-GH控制算法,并对该半主动悬架系统进行了仿真测试。通过仿真试验的结果来看,悬架系统的平顺性与操纵稳定性评价指标均得到了良好的改善,一定程度上为后续的实车试验研究提供了理论基础,具有一定的应用价值。但本文缺少对路面等级的识别,使得路面识别系统不够完善,需要在后续的研究中完善。
猜你喜欢
建筑热能通风空调(2021年11期)2021-12-26
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2017年6期)2018-01-19
中国照明(2016年5期)2016-06-15
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
江苏大学学报(自然科学版)(2014年6期)2014-02-28
上海金属(2013年4期)2013-12-20