
基于响应面法的水下滑翔机联翼布局优化设计
2024-02-26 03:25何建威张文鹏
船舶标准化工程师 2024年1期
何建威,张文鹏
(沈阳工业大学 机械工程学院,沈阳 110870)
0 引言
水下滑翔机的工作原理是依靠自身静浮力和对俯仰角的调节以实现锯齿形行进[1]。水下滑翔机在工作时所受到的水动力可以分解为升力和阻力,升力越大,阻力越小,则在单个周期内的航程越远[2]。因此,在进行水下滑翔机的外形设计时,常常将升阻比作为指标[3]。对于常规后掠翼水下滑翔机,其机翼提供的升力和阻力分别约占滑翔机总升力的60%和总阻力的20%。因此,对水下滑翔机机翼的研究十分必要[4]。
联翼布局这一概念最早起源于航空航天领域[5]。相比与常规后掠翼布局,联翼布局具有诱导阻力小、升力系数大、稳定性良好、结构刚度大、结构重量轻等特点[6-7]。目前关于联翼式水下滑翔机的研究较少。李天博[8]最早提出了联翼式水下滑翔机的概念,设计出3种联翼布局的水下滑翔机,并通过仿真分析证明了正交错联翼布局水下滑翔机比常规后掠翼水下滑翔机具有更优的升阻特性。陈振纬等[9]设计了一种类似于联翼布局的菱形翼水下滑翔机,并对其在非均匀流场下的升沉与俯仰运动进行了计算分析,证明了菱形翼水下滑翔机在非均匀流场下具有较强的抗干扰性。
本文以升阻性能最优的正交错布局联翼式水下滑翔机为研究对象,对联翼布局进行参数化描述,通过单因素法研究各参数对滑翔机水动力性能的影响,选取对水动力性能影响较大的参数作为响应因子,采用响应面法对其进行优化设计,从而研究各参数对滑翔机水动力性能的耦合影响。
1 联翼布局几何参数
1.1 参数化描述方法
联翼式水下滑翔机的联翼布局由一对前掠翼与后掠翼组成。其中,前翼在上,后翼在下的联翼式布局为正交错联翼式布局,本文以正交错联翼式布局水下滑翔机为研究对象。联翼布局结构示意见图1,其中:L为机身全长;R为机身直径;φ1为前翼后掠角;xa为前翼翼根至滑翔机头部的距离;xb为后翼翼根至滑翔机头部距离;cr为翼根弦长;ct为翼梢弦长;bt为半翼展;gv为前后翼高度差;gr为前后翼翼根横向距离。

图1 联翼布局结构示意图
选取6个几何外形参数对联翼式布局进行描述,对参数进行无量纲化处理使其具有更广泛的适用性,无量纲处理后的参数分别为:前翼后掠角φ、机翼位置xr、几何展弦比λ、翼间距Gr、根梢比η和翼隔Gv。联翼布局几何参数见表1,通过SO LIDWORKS中的方程式参数化建模功能直接改变滑翔机的几何模型。

表1 联翼布局几何参数
1.2 设计指标
水下滑翔机的滑翔经济性一般通过升阻比L/D[10]来衡量,升阻比越大,则滑翔经济型越高。滑翔稳定性通过静稳定系数lα'来衡量[11],当lα'<0时,滑翔机处于静稳定状态;当lα'=0时,滑翔机处于临界稳定状态;当lα'>0时,滑翔机处于静不稳定状态。由于一般情况下水下滑翔机的设计是静稳定的[12],所以当lα'<0时,滑翔稳定性最好。本文希望在保证滑翔稳定性的基础上(即lα'<0)获得最大的升阻比。静稳定系数lα'的表达式为
式(1)和式(2)中:lα为攻角α产生的升力;l为水下滑翔机的特征长度;Mα为攻角α产生的俯仰力矩。
2 数值计算方法及验证
2.1 计算工况
本文通过STAR-CCM+软件对攻角α=6°下的水下滑翔机升阻比及俯仰力矩进行数值计算,将水下滑翔机的机身全长L取为特征长度,计算域为一个5.5L×2L×2L(长×宽×高)的立方体。其速度入口位于距离滑翔机艏部2L处,入口流速v=0.5 kn。数值计算采用标准k-ε湍流模型,对滑翔机壁面采用标准壁面函数进行处理,取y+≈50。网格划分总数量为150万。计算域模型示意图及滑翔机表面网格划分情况见图2。

图2 整体及SUBOFF 表面网格划分情况
2.2 方法验证
为了验证数值计算方法的有效性和准确性,以美国国防高等研究计划署提出的SUBOFF项目为研究对象[13],对SUBOFF模型的仿真计算结果与试验数据进行对比。整体及SUBOFF表面网格划分情况见图3。
SUBOFF阻力的数值计算结果和试验结果的对比情况见表2,相对误差保持在0.01%~3.98%,精度可以达到工程要求。
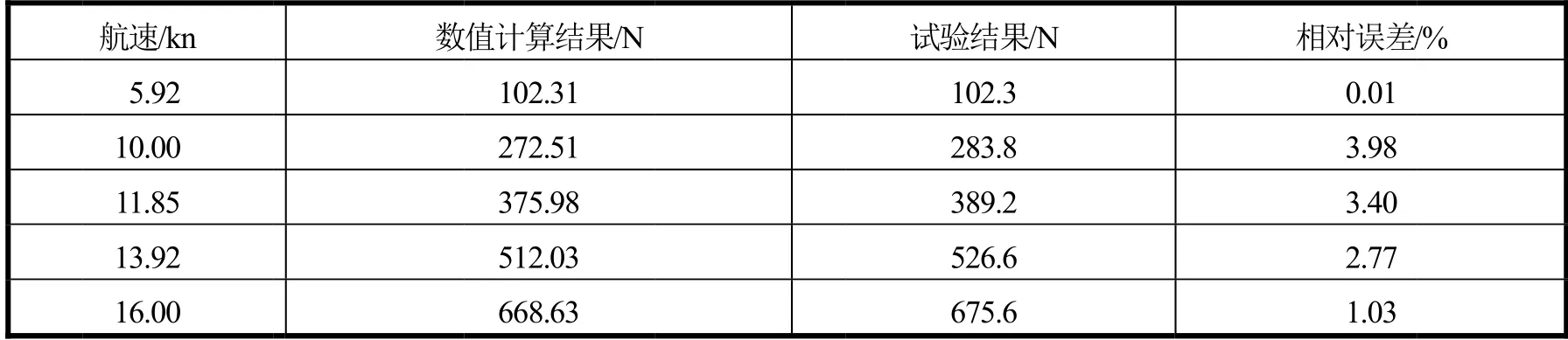
表2 SUBOFF阻力计算结果
3 单因素几何参数影响分析
3.1 相对位置
根据常规后掠翼水下滑翔机的设计经验可知,机翼位置越靠后,则水下滑翔机的滑翔稳定性越好[14]。由图4可知,随着相对位置的增大,滑翔机的静稳定系数lα'变小,即稳定性变好,当相对位置达到45%后,静稳定系数lα'<0,此时滑翔机处于静稳定状态。相对位置为30%时升阻比达到最大,但最大升阻比的总体变化趋势并不明显。根据以上分析,选取45%为最优联翼相对位置。

图4 相对位置xr的影响
3.2 前翼后掠角
由图5可知,随着前翼后掠角φ由0°增加至30°,lα'逐渐下降,并在φ=30°时达到最小值,滑翔机稳定性最好。当前翼后掠角φ达到30°后,lα'的变化不再明显。随着前翼后掠角φ由0°增加至30°,升阻比L/D逐渐增加,并在φ=30°时达到最大值,当前翼后掠角φ达到30°后,L/D的变化不再明显。由上述分析可知,最优前翼后掠角为30°。

图5 前翼后掠角φ的影响
3.3 几何展弦比
几何展弦比是机翼的重要外形参数,在保持机翼面积不变的情况下,增大几何展弦比会使滑翔机翼展增加,弦长减小。由图6可知,随着几何展弦比的增加,升阻比L/D增大,αl'减小。较大的几何展弦比能在保证稳定性的同时提高滑翔经济性,但是过大的展弦比也会增大机翼根部弯矩,导致整体质量增加[15]。此外,过大的翼展更容易造成滑翔机的损坏,增加投放和回收的难度[16]。根据以上分析,本文的联翼式水下滑翔机选取几何展弦比为6,此时达到的最大升阻比为5.199,将此作为联翼式水下滑翔机初始构型。

图6 几何展弦比的影响
3.4 翼间距
翼间距Gr是表述前后翼之间横向距离的几何参数,当Gr过小时,前后翼之间会产生较大的涡流干扰,当Gr过大时,前后翼整体消除部分空气流动的能力变弱,从而无法抵消部分诱导阻力,故Gr不易过大也不宜过小,选取合适的Gr有利于更好地减少两翼间涡流干扰并隔断部分空气流动,从而消除部分诱导阻力。由图7可知,随Gr逐渐增大,升阻比呈先增大后减小的趋势。当Gr=0.21时,升阻比达到最大,随后便缓慢下降。αl'随着翼间距的增大呈持续下降的趋势,这是由于在相对位置不变的情况下,增大Gr可使后翼更加靠近机尾,从而使滑翔机的重心后移,稳定性得到提升。由上述分析可知,最优翼间距Gr为0.21。

图7 翼间距Gr的影响
3.5 根梢比
根梢比η是指前(后)翼根弦长与前(后)翼梢弦长的比值。由图8可知,当根梢比1<η<3时,滑翔机的升阻比呈上升趋势,当根梢比η=3时,升阻比为5.563 6,达到最大值。当根梢比3<η<5时,滑翔机的升阻比呈下降趋势。lα'随着根梢比η的增长缓慢增加,但均小于0,满足设计需求。综上所述,最优根梢比为3。

图8 根梢比η的影响
3.6 翼隔
翼隔Gv是表征前后翼之间高度差的几何参数,当翼隔Gv过小时,两翼垂向距离之间涡的干扰较为明显,从而增加机体的诱导阻力。当翼隔Gv过大时,经过前翼的水流较难通过后翼,使前翼上表面的低压区缩短,从而减小前翼的升力系数。由图9可知,当翼隔0.1<Gv<0.5时,升阻比逐渐现增大。当Gv=0.5时,升阻比达到最大,随后升阻比随Gv的增大而减小。lα'随着翼隔Gv的增大而减小。Gv=0.5与Gv=0.6的压力云图对比情况见图10。由图10可知,Gv=0.5时前翼上表面低压区面积大于Gv=0.6时的面积,故其前翼的升力系数更大,进而升阻比更大。因此,只有在适当的范围内选取翼隔Gv,才能有效地增大升阻比。由上述分析可知,最优翼隔Gv为0.5。

图9 翼隔Gv的影响

图10 Gv=0.5与Gv=0.6的压力云图对比情况
4 单因素几何参数影响分析
4.1 优化设计
通过单因素几何参数影响分析可知,翼间距Gr、翼隔Gv、根梢比η对联翼式水下滑翔机升阻比的影响更为明显。为考虑上述因素间的耦合影响,本文采用精度较高的效应面法(Box-Behnken Design,BBD)法进行优化设计[17]。将翼间距Gr、翼隔Gv、根梢比η这3个因素作为响应因子,将升阻比作为响应值。BBD设计结果见表3。

表3 BBD设计结果
利用二次多项式对表3中的数据结果进行拟合,从而得出翼间距Gr、翼隔Gv、根梢比η之间的回归方程如下:
4.2 方差分析
为检验回归模型的可靠性,对响应模型进行方差分析。由表4可知,回归模型的P值<0.000 1(显著),失拟项P值=0.216 9>0.05(不显著),这证明响应因子与响应值之间的函数关系拟合性好,模型的可靠性较高。模型的相关系数R2=0.989 2接近1,这说明回归方程的相关性较好。AdjR2=0.975 3,PredR2=0.884 2,两者数值较为接近,这说明回归模型可准确地反映响应因子与响应值之间的关系。

表4 方差分析
响应因子与升阻比响应曲面图见图11。由图11(a)可知,翼间距与翼隔所构成的响应面弯曲度较大,两者交互影响较为明显。当根梢比一定时,随着翼隔的增大,升阻比迅速增大,到最大值后,翼隔继续增加,升阻比呈缓慢下降的趋势。随着翼间距的增大,升阻比呈现先增大后减小的趋势,翼间距占机身总长20%左右时,升阻比最大。

图11 响应因子与升阻比响应曲面图
由图11(b)可知,翼间距与根梢比的交互作用较为明显,当翼隔一定时,升阻比随根梢比的增大呈现缓慢增大后又减小的趋势。
由图11(c)可知,在翼间距一定的情况下,升阻比随翼隔和根梢比的减小呈现先增大后减小的趋势,这说明在翼间距一定时,存在一组最优翼隔和根梢比参数使升阻比达到最大。
4.3 优化结果与分析
BBD优化设计得到的最优结果见表5。由图5可知,升阻比的预测值与仿真值的相对误差为0.25%,这说明模型的可靠性较高。优化前后的对比情况见表6,可以看出利用单因素法优化得到的升阻比相对于初始构型提升了7.79%。利用BBD优化得到的升阻比相对于初始构型提升了8.19%,相对于单因素法提升了0.37%。此外,优化后的lα'<0,满足静稳定性的设计要求。

表5 优化结果

表6 优化前后对比情况
优化前后翼间涡切片对比情况见图12。由图12可以看出,由于初始构型的翼隔和翼间距较小,导致前翼下方脱落的涡和后翼上方脱落的涡距离较近,从而使彼此产生了相互干扰,增大了机体的诱导阻力。通过BBD优化得到的构型其前翼下表面涡强度较大,但由于其翼隔和翼间距较大,两翼间涡的距离较远,涡损耗较小,两翼间不易产生较大的束缚涡流,从而降低了干扰,使升阻比得到提升。

图12 优化前后翼间涡切片对比图
5 结论
本文提出了一种联翼布局的外形参数化方法,选取几何展弦比为6的联翼式水下滑翔机为初始构型,采用单因素法对各参数对滑翔机水动力性能的影响进行分析,并采用响应面设计中的BBD法对滑翔机的联翼布局进行优化设计,可得到如下结论:
1)提出了联翼式水下滑翔机的联翼布局外形参数化方法,并对所提出的外形参数进行了无量纲化处理,使其具有较广泛的适用性。
2)采用单因素分析法对联翼式水下滑翔机的各外形参数进行分析,结果表明:相较于其他外形参数,翼间距、根梢比、翼隔等对水下滑翔机的水动力性能影响较大,因此优化此3个参数,对滑翔机的水动力性能有较大的提升。
3)采用响应面法对联翼布局进行优化设计,优化后的滑翔机相比于初始构型升阻比提升了8.19%。结果表明:适当增加滑翔机的翼间距和翼隔有利于降低两翼间的相互干扰,从而有助于提高整机的升阻比。
本文的研究成果可为水下滑翔机联翼布局设计提供一定参考。
猜你喜欢
机械设计与制造(2021年2期)2021-03-05
兵器装备工程学报(2020年3期)2020-04-22
知识就是力量(2019年7期)2019-07-01
军事文摘(2018年24期)2018-12-26
小学科学(学生版)(2018年12期)2018-12-19
北京航空航天大学学报(2017年8期)2017-12-20
安徽农学通报(2017年18期)2017-10-18
能源(2017年5期)2017-07-06
中国科技信息(2016年15期)2016-11-04
中国卫生(2015年2期)2015-11-12
