一种5R+异形3RPS的混联上肢康复机构研究
2024-02-29 09:24高云涛汪传生
机械设计与制造 2024年2期
梁 辉,王 辉,高云涛,汪传生,2
(1.青岛科技大学机电工程学院,山东 青岛 266061;2.青岛科技大学山东省高分子材料先进制造技术重点实验室,山东 青岛 266061)
1 引言
根据世界卫生组织的数据,中国的中风发病率居世界首位,中国40 岁以上的研究人群中,有15%的人群面临中风高风险,并且脑卒中患者都会留下后遗症,最常见的就是上肢偏瘫症状[1]。对于患有偏瘫症状的人群,康复训练其偏瘫的部位是重要的医疗手段,利用外骨骼康复机器人既能解决传统康复方式对患者的经济承受力、医护人员数量、康复效果有局限性的问题,并且提供有效的康复训练。
目前,在国内外已经有多种康复机构,文献[2]设计研究了一种上肢外骨骼CADEN-7,康复训练七自由度,驱动采用绳索牵引。虽然肩关节有三个自由度,可以灵活地康复肩关节,但是它的外部结构是远离人体的并没有完全贴合人体上肢,而且腕关节处的偏置问题也有待改进。还有文献[3]设计的半外骨骼式上肢康复机器人ARMin II,采用电机吊绳驱动,该机器人有七个主动自由度和五个被动自由度,适用于不同患者的要求,但是腕部康复的机构较复杂,康复的灵活性较差。国内的上肢康复机器人的研究比较落后于国外,文献[4]研究设计了新型上肢外骨骼机构,康复上肢的五个自由度,该机器人可以适应不同身高、损伤程度、患侧的上肢偏瘫患者并采集患者上肢的肌电信号进行运动辨识,但是腕部可实现的康复自由度较少、功能不完整,整个上肢康复外骨骼结构的运动空间较小。文献[5]设计研究的第二代七自由度上肢康复外骨骼,在第一代的基础上肩部增加一个转动关节,腕部采用滑环机构和3-RPS机构串联,用气缸作为执行元件,由于腕部过于灵活增加了部分制动,但腕部的控制位置还是不够精准。
上肢康复器械[6]在结构方面上,它的外部结构占比不宜过大,要与上肢贴合紧凑;腕部康复也尤为重要,自由度不宜过少,要达到灵活准确和不与患者发生干涉的康复标准。这里研究设计了一款多自由度混联上肢康复机构,能够康复训练腕关节的内收/外展、屈/伸运动、肘关节的屈/伸运动以及肩关节的旋前/旋后、内收/外展、屈/伸运动。
它是由步进伺服电机来提供动力,肩、肘的康复结构简单有效,腕部通过异形3-RPS并联机构[7]来有效实现康复,它的球副和齿条的移动副可以较为精准的达到预想位置。
2 上肢康复外骨骼机构方案设计
上肢康复外骨骼机构主要由座椅、控制台、运动基座、可调节立柱、上肢康复装置等组成,如图1所示。在该康复机构中,肩部高度、手臂长度及粗细都可以在一定范围内进行调节,来满足不同身高和不同体重患者的需求。此外,该康复机构在每个关节自由度都有机械限位,控制箱中有急停按钮来确保康复者的人身安全。
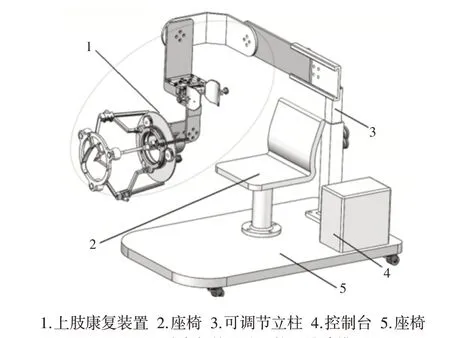
图1 上肢康复外骨骼机构三维建模Fig.1 Three Dimensional Modeling of Upper Limb Rehabilitation Exoskeleton Mechanism
上肢康复装置采用5R+3-RPS 的混联结构,先通过上部的5R 串联机构实现肩关节(内收/外展、屈/伸、旋前/旋后)、肘关节(屈/伸)、前臂(旋前/旋后)五个自由度的康复训练运动,再通过异形3-RPS并联机构实现腕关节(屈/伸、内收/外展)两个自由度的康复训练运动,其优势也在于腕关节康复的异形3-RPS并联机构可以较好地实现屈/伸、内收/外展的康复运动。根据成年人体尺寸应用原则中的可调性原则[8],设计上肢外骨骼机构的上臂、前臂及肩宽的长度调节范围分别为(313~331)mm、(235~252)mm、(375~398)mm。各关节自由度在康复训练中活动范围要略小于表1 所示的上肢在正常状态下的活动范围,防止二次伤害的发生。上肢康复外骨骼机构的最终设计方案,如图2所示。肩关节康复机构,如图2(a)所示。肩关节前屈/后伸和外展/内收运动模块都是电机与法兰盘螺栓连接输出带动支撑板实现的,肩关节旋内/旋外运动模块是由电机转轴连接的齿轮与护臂齿轮相互啮合来实现运动,调整肩关节中心与肘关节中心的距离,以适应不同患者上臂的长度。腕关节康复机构,如图2(b)所示。它是在3-RPS并联机构基础上做出了一定的改变,增大了腕部在机构内部空间的活动范围和支链移动副的行程,解决了患者在康复训练中人手与并联机构的干涉问题。肘关节康复机构,如图2(c)所示。肘关节前屈/后伸模块也是电机与法兰盘螺栓连接输出带动支撑板实现的,而前臂旋内/旋外模块是由行星齿轮结构实现的,电机带动行星小齿轮转动,从而带动行星大齿轮实现前臂的旋转。

表1 康复机构串联部分各关节杆件参数Tab.1 Parameters of Each Joint of Rehabilitation Mechanism in Series
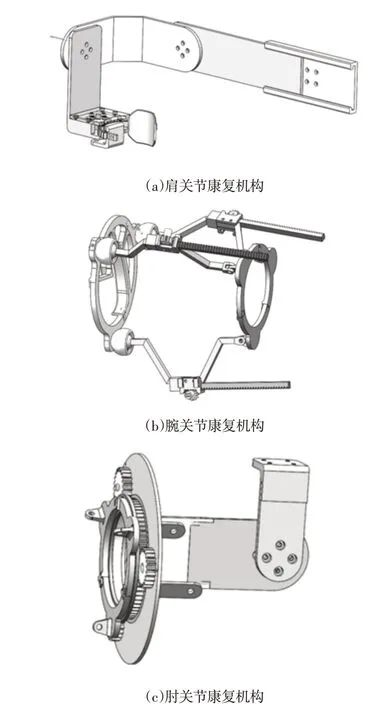
图2 上肢康复外骨骼结构设计方案Fig.2 Design Scheme of Exoskeleton Structure for Upper Limb Rehabilitation
3 运动学分析
上肢康复外骨骼机构运动学采用分步求解法求解[9],求解步骤分为两部分,一部分为求解如图3左边所示的串联部分的位姿转换矩阵及其运动学反解;另一部分为求解异形3-RPS并联机构组成的腕部康复机构的位姿转换矩阵[10],如图3所示。结合前面求得的结果得到在空间中康复机构末端中心点的位姿。

图3 上肢康复机构坐标系Fig.3 The Coordinate System of Upper Limb Rehabilitation Mechanism
串联部分:两相邻连杆间的关系用四个参数表示,分别是关节角θ,连杆偏距d,连杆长度a以及扭角α。腕部并联部分:平台1 的外接圆半径为R。切线u1、u2、u3与轴线X5的夹角分别是β1=90°、β2=210°、β3=330°。
3.1 上肢串联部分运动学求解
3.1.1 串联康复机构位姿转换矩阵求解
建立上肢康复外骨骼串联部分的各连杆D-H坐标系,如图3的左边部分所示。康复机构的串联部分D-H坐标系中各个杆件的变量和参数,如表1所示。
串联康复部分位姿转换矩阵T1表示为:
最后得到:
3.1.2 上肢串联康复机构逆解
利用反变换法[11],将可逆变换矩阵依次右乘到式(1)的左右两边,反复带入结果求解得出各关节变量θ(ii=1,2,3,4,5):
3.2 腕部康复机构运动学求解
3.2.1 腕部康复机构位姿转换矩阵求解
腕关节的3-RPS 并联机构实现两个自由度,该机构由上下平台1、2和三条支链构成,每一条支链均由转动副R、移动副P、球副S组成,三条支链呈对称分布[12],如图4、图5所示。
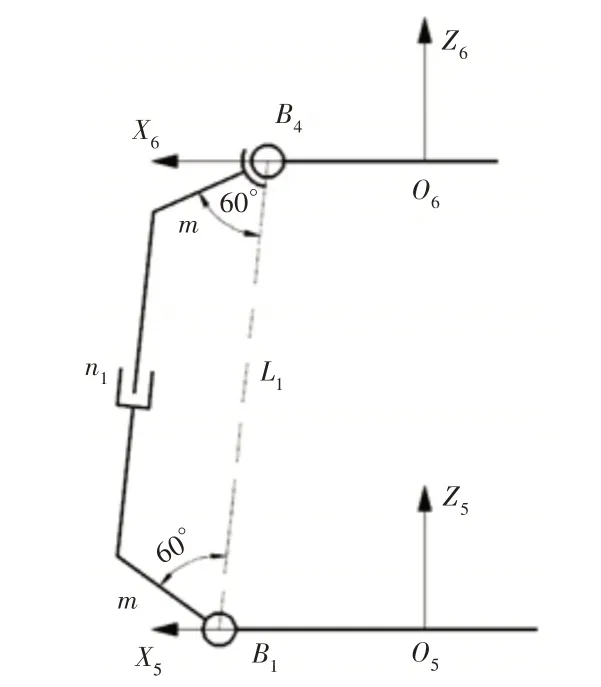
图4 腕部康复机构平台1结构简图Fig.4 Structure Diagram of Wrist Rehabilitation Mechanism Platform 1

图5 平台1转动副轴线布置方式Fig.5 Axis Layout of Platform 1
平台1的三个转动副R的中心在坐标系{5}中位置坐标B1、B2、B3分别是:
设平台1与支链BiBi+3夹角分别为δ(ii=1,2,3),则平台2的三个球副的中心在坐标系{5}中的位置坐标Bi+3分别是:
平台2球副中心的间距不变,即:
联立式(3)和式(4)即可求得δ(ii=1,2,3),求得结果代回式(2),可求得三个球副中心点的坐标。在坐标系{5}中的点O6坐标表示为:
通过式(5)可以得知坐标系{6}的坐标原点O6在坐标系{5}中的位置,坐标系{6}在坐标系{5}中3个坐标轴的方向余弦:
求得坐标系{6}相对于坐标系{5}的变换矩阵:
联立式(1)、式(7)得到坐标系{6}相对于基坐标系{0}的位姿转换矩阵:
3.2.2 腕部康复机构逆解
腕部并联机构平台2的外接圆半径为r,则在坐标系{6}中的球铰中心B4、B5、B6的坐标为:
球铰中心在坐标系{5}中的位置坐标B4、B5、B6为:
式中:Bk—球铰中心B(kk=4,5,6)在坐标系{5}空间中的坐标位置。求出三个杆长(关节变量):
4 ADAMS运动仿真
将SolidWorks中建立的多自由度混联上肢康复外骨骼机构三维建模(如图1所示)导入ADAMS软件[13];在软件中先定义虚拟样机材料为45钢和铝合金,然后对仿真结果进行处理,乘上安全系数,保证结果的准确性,如图6所示。康复运动的训练方案设计为两个阶段:第一个阶段为前5s内,肩关节做旋前、外展及前屈运动,运动的角度分别为45°、90°及30°,肘关节做后伸运动90°,前臂做旋后运动30°,腕关节做前屈运动;(5~10)s,上肢各部分及关节按原轨迹返回到初始位置。

图6 上肢康复机构虚拟样机仿真模型Fig.6 Virtual Prototype Simulation Model of Upper Limb Rehabilitation Mechanism
设定仿真时间为10s,仿真步数为100步,待仿真结束后,末端执行器质心的位移、速度、加速度曲线图,如图7~图9所示。

图7 末端质心位移曲线Fig.7 Displacement Curve of End Mass Center

图8 末端质心速度曲线Fig.8 Velocity Curve of End Mass Center

图9 末端质心加速度曲线Fig.9 Acceleration Curve of End Mass Center
从图7~图9中可以看出,末端质心的位移过渡平稳,速度和加速度曲线没有发生突变情况,检验证明了机构可以按照康复轨迹正确进行并且过渡安全稳定。
5 腕部装置的实验探究
5.1 试验样机介绍
3D打印加工腕部结构,试验使用步进电机24-BYJ48和控制器arduino来驱动腕部装置,并进行组装调试,腕部康复装置的试验样机实现的功能,如图10所示。三个步进电机以相同的速度同步转动,相应的电机运行时间与转向不同,可以达到不同姿态。

图10 腕部装置的试验样机Fig.10 Test Prototype of Wrist Device
手腕的前屈姿态,步进电机1正转,步进电机2、3反转,如图10(a)所示。手腕的后伸姿态,步进电机1反转,步进电机2、3正转,如图10(b)所示。手腕的内收姿态,步进电机2正转,步进电机3反转,如图10(c)所示。手腕的外展姿态,步进电机2反转,步进电机3正转,如图10(d)所示。以上四种姿态实现的时间和角度都不同,被测者需要试验10次,记录每次每个姿态的实现时间和达到的最大角度,取平均值。
5.2 试验样机的检测及结果分析
试验的目的是检测装置在实际运行中每个姿态能达到的角度范围以及装置运行的平稳性和准确性。考虑到电机的供力大、效率高、噪声低的需求,步进电机的常态转速设置在20r/min。分别记录腕部实现各个姿态的时间和实际角度范围,如表2所示。由表2和试验过程可知,腕部装置在实现康复的运行过程比较平稳,没有速度突变的情况;完成时间也比较符合手腕正常活动的时间;实际的活动角度范围可达到理想状态的(73~82)%,可以比较有效的实现康复。
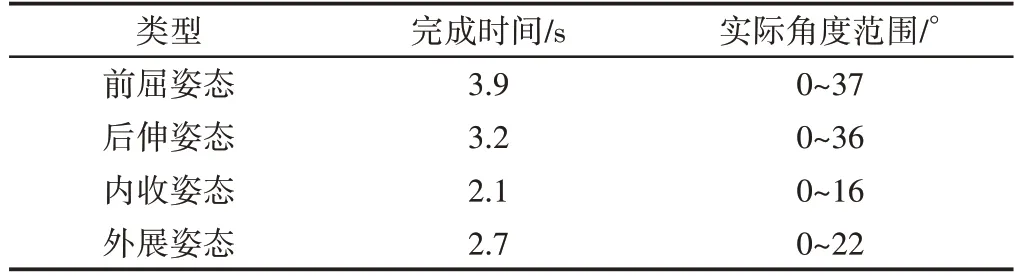
表2 实验数据记录表Tab.2 Experimental Data Record Table
6 结论
(1)该研究提出一种5R+异形3-RPS的7自由度混联康复外骨骼机构,串联部分康复患者的肩关节与肘关节的五个自由度,并联部分采用3-RPS结构康复患者手腕的两个自由度,全面有效地康复患者上肢,该机构有广阔的市场应用前景。(2)通过对上肢机构的运动学坐标系进行整体分析求解,创新性地将串联部分与并联部分结合,为分析上肢康复机构的操作空间和控制方法奠定了基础。(3)通过ADAMS运动仿真求解出末端质心的轨迹以及末端质心的位移、速度、加速度变化曲线图,末端质心位置比较平稳的运动,速度和加速度曲线没有突变情况。但针对其他各个自由度配合的多种姿态的仿真问题,还需要进一步的分析研究,避免突发情况的发生。(4)通过腕部试验的研究,平均试验完成时间也比较符合手腕正常活动的时间,实际的活动角度范围可达到理想状态的(73~82)%,验证了该机构可以较为精准、有效的康复训练。
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05
故事作文·低年级(2023年12期)2023-03-24
中老年保健(2021年5期)2021-08-24
中老年保健(2021年6期)2021-08-24
中老年保健(2021年7期)2021-08-22
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
上海医学(2019年1期)2019-04-13
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26