基于MBSE的对流层飞艇运行概念研究
2024-03-05 10:21陈志兵罗战虎王建国
系统工程与电子技术 2024年3期
陈志兵, 邬 恒, 罗战虎, 王建国
(1. 中国特种飞行器研究所, 湖北 荆门 448035; 2. 航空工业信息技术中心, 北京 100028)
0 引 言
对流层飞艇是一种适应对流层环境、轻于空气、由动力推进并可操纵的航空器。与传统概念的飞行器借助机翼或者旋翼与空气的相对运动而产生的升力不同,飞艇主要依靠轻质气体产生净浮力进行飞行,因此飞艇具有能耗低、滞空时间长等特点[1]。
飞艇的研制流程与传统航空器一样,主要分为探索研究阶段、概念阶段、设计阶段、生产阶段、使用阶段和退役阶段[2]。其中,概念阶段发生在产品全生命周期的早期,主要承担快速阐明需求、探索解决方案、制定运行概念并初步得出物理解决方案的任务,是后续型号设计、制造和投入商业运行能否成功的前提与关键[3]。在概念阶段,运行概念作为重要组成部分和主要输出,是连接利益攸关者需求与系统设计规范之间的桥梁[4-6]。其以利益攸关者的需求、系统目标和关键假设为出发点,使用概念的形式体现系统和系统的运行过程,并且能为后期系统的实现(硬件、软件、人力、材料、流程等) 提供参考和支持[7]。
在当前的工程实践中,对流层飞艇的运行概念主要使用文本文档的形式进行描述。这种传统方法在以往的工作中发挥了很大的作用,但是在项目推进过程中还存在着以下问题:
(1) 传统基于文本描述的设计文档一致性较差,沟通效率较低且容易产生歧义,往往不能精确描述系统特征和运行场景。尤其是在飞艇牵引起飞、返场着陆等复杂场景中,文本文档往往不能清晰梳理各对象之间的交互关系与执行逻辑。
(2) 运行概念作为连接利益攸关者需求与系统设计规范之间的桥梁,文本文档形式难以保证利益攸关者需求和对流层飞艇架构设计之间的同步更新和设计可追溯性。这些限制通常会导致效率低下和质量问题,而这些问题往往只有在系统集成和测试阶段才会暴露[8]。
(3) 可验证性差。运行概念的交付物以静态的文本形式进行呈现,缺乏相应手段对运行场景的执行逻辑进行验证。运行概念模型的评定更多依靠设计人员的历史经验与直觉,缺乏客观的评定标准。
针对基于文本的运行概念开发的局限性,本文引入基于模型的系统工程(model-based system engineering, MBSE)的建模方法。MBSE 是一种对建模的形式化应用,以支持从概念设计阶段开始并贯穿整个产品生命周期的系统需求、设计、分析、验证和确认等活动[9]。MBSE不专注于解决具体学科的设计问题,而是强调面向系统工程过程的建模,将需求、分析、设计、验证等过程中涉及的要素模型化并有机联系在一起,保持了全生命周期系统信息的一致性与可追溯性。
在航空领域,学者引入MBSE方法并将其应用于概念分析[10-11]、需求分析与架构设计[12-18]、关键系统设计[19-24]等领域,这些成果表明MBSE相比传统基于文本的系统工程在需求捕获与验证、保持设计一致性、复杂系统建模等方面具有不可比拟的优势。
本文将MBSE的建模方法引入到对流层飞艇的运行概念研究中,通过系统建模语言(system modeling language, SysML)搭建运行概念模型并与利益攸关者需求建立关联关系,从而达到精确、可追溯和可验证的建模目的。本文首先识别并捕获完整的利益攸关者与利益攸关者需求,并定义系统用例,以此建立用例与利益攸关者需求的关联关系;然后以飞艇的航测航拍用例为例,基于Rhapsody软件建立飞艇运行场景分析模型;最后基于任务状态机图对运行概念模型进行验证。
1 基于MBSE的对流层飞艇运行概念设计流程
相比于基于文本的系统工程,MBSE并不会改变概念阶段的方法流程,最大的差别是交付物由文本转化为模型。根据系统工程原理与民机研制概念阶段工作要求[25-28],得出基于MBSE的对流层飞艇运行概念设计流程,如图1所示。
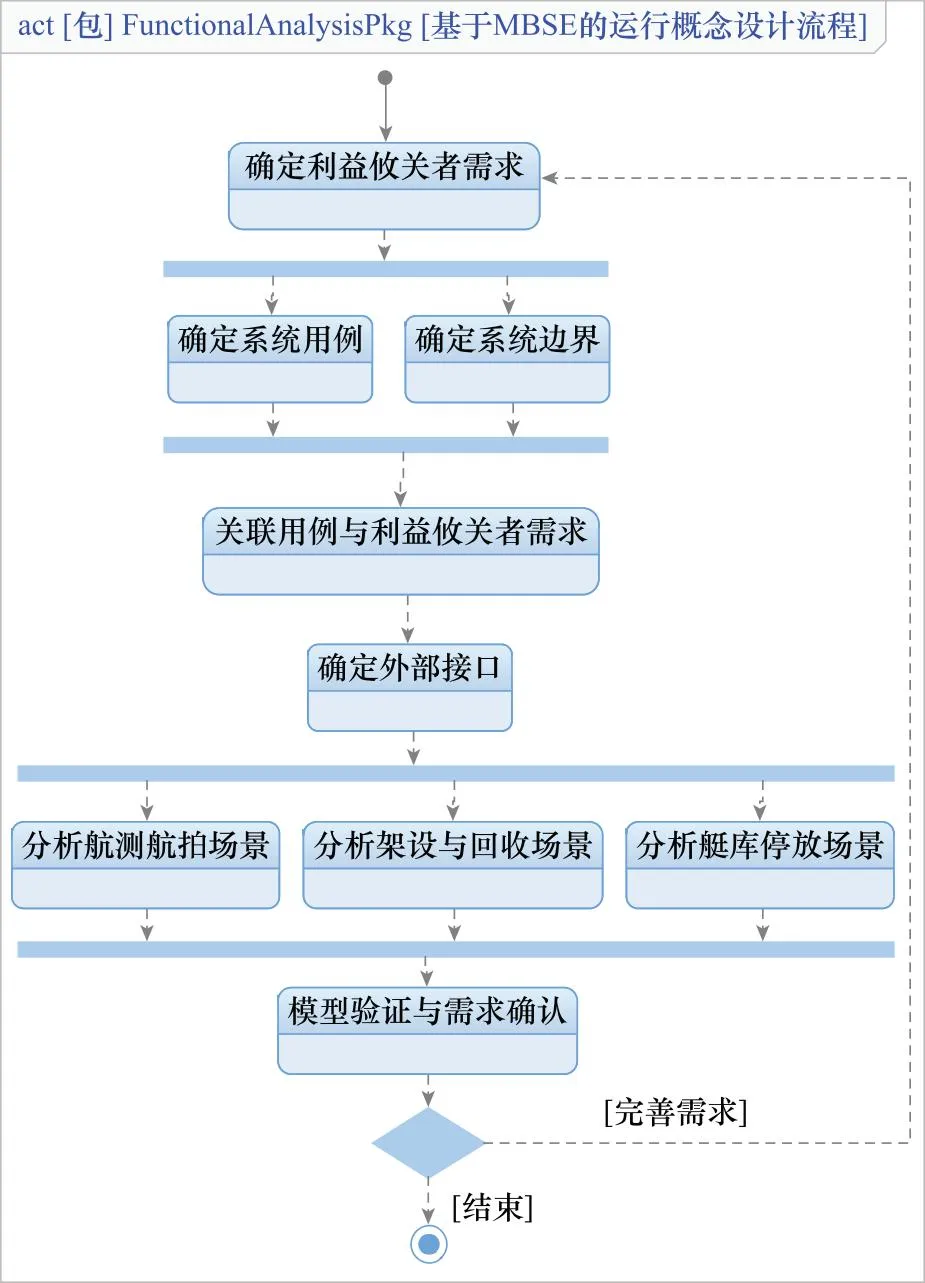
图1 基于MBSE的对流层飞艇运行概念设计流程Fig.1 Design process of concept of operation for tropospheric airship based on MBSE
基于MBSE的对流层飞艇运行概念设计流程主要分为如下3个部分。
(1) 确定利益攸关者需求。利益攸关者需求是飞艇前期论证与后续设计制造的最原始输入,是保证后续型号研制能否成功的基础。本文基于以往设计经验和面向供应链过程的利益攸关者模型,确定所有利益攸关者并构建需求清单。
(2) 定义系统用例与外部接口。用例是围绕飞艇利益攸关者需求的凝炼,描述了飞艇如何实现设计目标的核心功能。通过对上文利益攸关者需求清单和系统外界交互关系的综合分析,确定飞艇运行的用例模型与外部接口。
(3) 展开用例场景分析,建立描述飞艇黑盒视角的模型视图并对模型进行验证。基于飞艇用例与外部接口,对飞艇运行过程中最主要的场景进行详细建模,最后基于状态机视图确认和验证运行场景的正确性与完整性。
2 基于用例的对流层飞艇需求分析
2.1 需求分析
本文目的是设计一款执行航测航拍任务的对流层无人飞艇(简称“无人飞艇”)。依据供应链中的上下游关系,确定利益攸关者主要包括投资方、适航局方、用户和运营保障。结合以往设计经验与用户需求座谈会研讨成果确定利益攸关者需求共125项,部分清单如表1所示。完整清单在需求管理软件DOORS中进行统一管理。
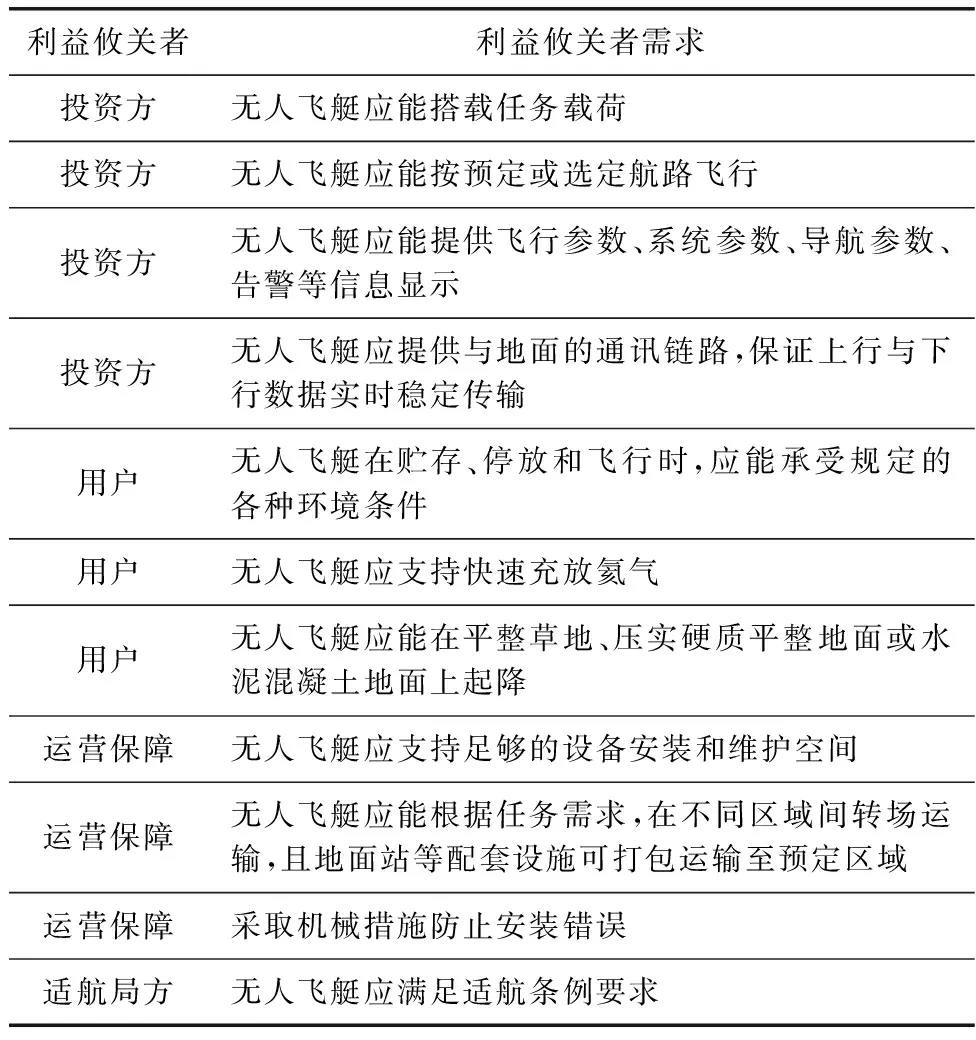
表1 利益攸关者需求清单Table 1 List of stakeholder requirements
2.2 定义外部接口与用例
用例作为利益攸关者需求的高度提炼,内涵是对无人飞艇关键需求与顶层目标的描述,在无人飞艇全生命周期中包括运行类用例、制造类用例、维护支持类用例、退役报废类用例等。本文研究的是无人飞艇运行概念模型,在整个使用周期中主要有架设安装、航测航拍任务、艇库停放、无人飞艇回收、试验试飞等流程,综合利益攸关者需求清单,排除涉及利益攸关者需求较少的运行用例,将工作重点集中于航测航拍、艇库停放、架设与回收3个主要用例。
根据已确定用例与国内外无人飞艇的运行经验,确定无人飞艇运行过程中全部用例参与者,其具体职责分工如表2所示。

表2 用例参与者清单及其职责划分Table 2 List of use case participants and responsibility division

续表2Continued Table 2
结合用例参与者的职责划分建立顶层用例视图,如图2所示。用例图通过描述系统用例和用例参与者之间的交互来“捕捉”无人飞艇的利益攸关者需求。

图2 运行概念用例图Fig.2 Use case diagrams for concept of operation
2.3 关联利益攸关者需求到系统用例
用例作为利益攸关者需求清单的高度凝炼,也是后续场景开发的基础。为了保证运行概念模型设计的可追溯性,需建立利益攸关者需求与系统用例的关联关系。首先,DOORS软件通过Rhapsody Gateway集成接口将利益攸关者需求导入到Rhapsody项目中的RequirementsPkg下。然后,使用Rhapsody SE-Toolkit的功能Create Dependency关联到用例[29]。利益攸关者需求与系统用例的关联关系视图如图3所示。利益攸关者需求与系统用例的关联关系通过用例与需求条目之间建立〈trace〉关系来实现,纵向代表着利益攸关者需求,横向代表着无人飞艇用例,两者通过带虚线的箭头建立关联关系。

图3 关联利益攸关者需求与系统用例Fig.3 Correlation of stakeholders’ requirements and use case
3 无人飞艇运行概念建模与需求验证
3.1 无人飞艇运行概念场景设计
针对航测航拍、艇库停放、架设与回收3个用例,以其中最核心的航测航拍用例为例,开展运行场景分析。对流层无人飞艇在执行航测航拍任务时首先在艇库安装光电转塔、高清可见光摄像机、红外热像仪等任务设备。然后,将无人飞艇从艇库牵引至起降场地垂直起飞至起飞至安全距离,进而爬升至任务高度飞行并逐渐进入巡航状态。接着,无人飞艇按预定航路或选定航路飞行,保持巡航速度,飞至指定目标空域进行航测航拍。任务完成后,无人飞艇返回起降场地上方,下滑飞行至安全离地高度,垂直降落。
航测航拍用例由多个场景构成,通常包括正常场景与异常场景。其中,异常场景描述的是非正常场景,如在起飞阶段或者执行航测航拍任务阶段若出现通讯中断、关键系统故障等情况,无人飞艇不能继续飞行,地面站与总指挥根据突发情况类别执行相应的应急预案,无人飞艇会切换至自主飞行模式,实施紧急迫降。详细的运行阶段任务划分如表3所示。
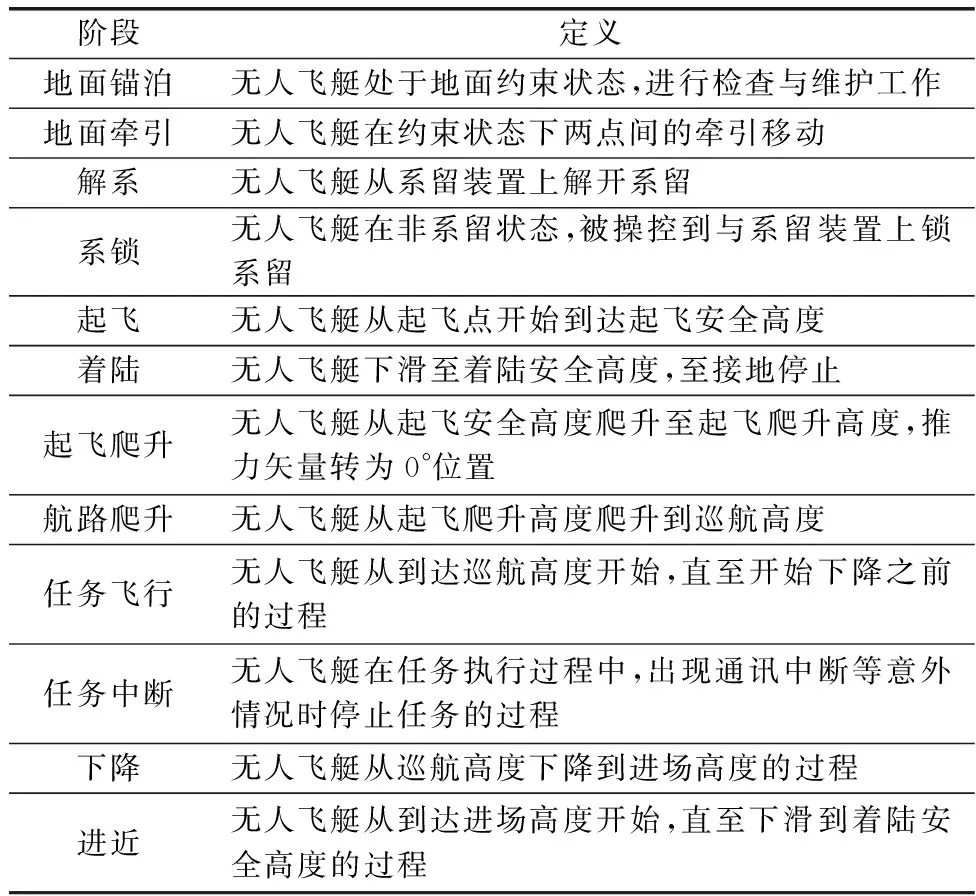
表3 任务阶段划分Table 3 Task phase division
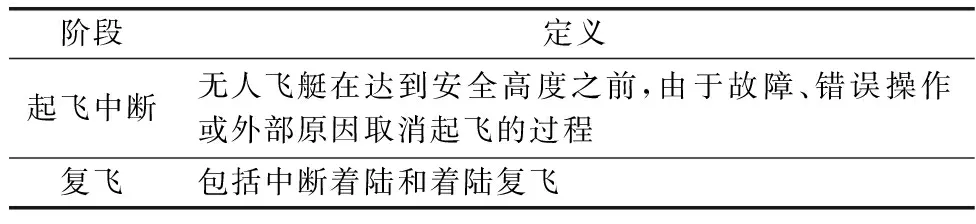
续表3Continued Table 3
根据航测航拍任务的阶段划分,建立无人飞艇航测航拍的活动图。主活动图如图4所示,主要分为艇库内准备、飞艇出库、飞行前准备、起飞、任务飞行、返航降落、系留入库7个阶段。
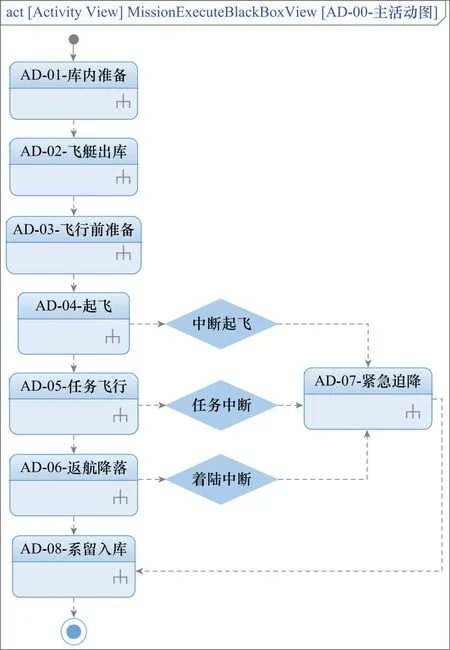
图4 航测航拍任务主活动图Fig.4 Main activity diagram of aerial survey and photography task
与直升机、固定翼飞机在地勤准备结束后飞行机组独立执行升降操作不同,无人飞艇需要大量的地面运营人员和设施设备来协助完成牵引、系留和降落等工作。同时,无人飞艇主要依靠静浮力进行飞行,速度较慢且囊体体积巨大,因此无人飞艇对环境变化异常敏感,气象适应性较弱。基于此,本节主要针对无人飞艇牵引出库、任务飞行两个阶段进行详细分析。
在库内准备工作完成以后,无人飞艇准备出库。首先,将起落架调整为自由转动状态,系留塔上的头锥锁处于水平面360°自由旋转,并确认无人飞艇出库时风速不大于5 m/s;然后,牵引系留车以不大于5 km/h的行进速度牵引无人飞艇出库,并在牵引过程中保持匀速行驶;在出库过程中,地面组长需时刻观察风速风向与艇体姿态,并根据风速风向情况,指挥拉绳员和吊舱扶舱员控制无人飞艇方向;最后,牵引无人飞艇到达指定位置后,柔和停车,详细工作如图5所示。活动图通过活动对事件、能力和数据流进行建模,使用控制节点控制活动的执行,通过Actor-pin(特殊的对象节点)表示动作的输入和输出。

图5 无人飞艇出库活动图Fig.5 Activity diagram of the unmanned airship of boathouse outbound
任务飞行阶段是完成航测航拍的关键,也是评判无人飞艇研制是否成功的最重要标志。在无人飞艇的爬升达到任务速度与高度以后,无人飞艇保持速度按照规划路线进入目标区域开始航测航拍任务。无人飞艇一旦发生严重故障或与地面通讯中断,就会立即执行紧急预案,并中断任务,进行紧急迫降。在正常状态下,无人飞艇会依据获取的地面控制站指令,切换自主飞行和地面站控制两种飞行模式,依靠舵面、副气囊、发动机等系统控制执行转弯、爬升、下降等机动动作。详细过程的任务飞行时序图如图6所示。时序图由垂直的生命线构成,能直观描述角色与用例之间按时间顺序的动态交互关系[30-31]。图6详细描述了无人飞艇在飞行任务中面对不同状况的运行场景。
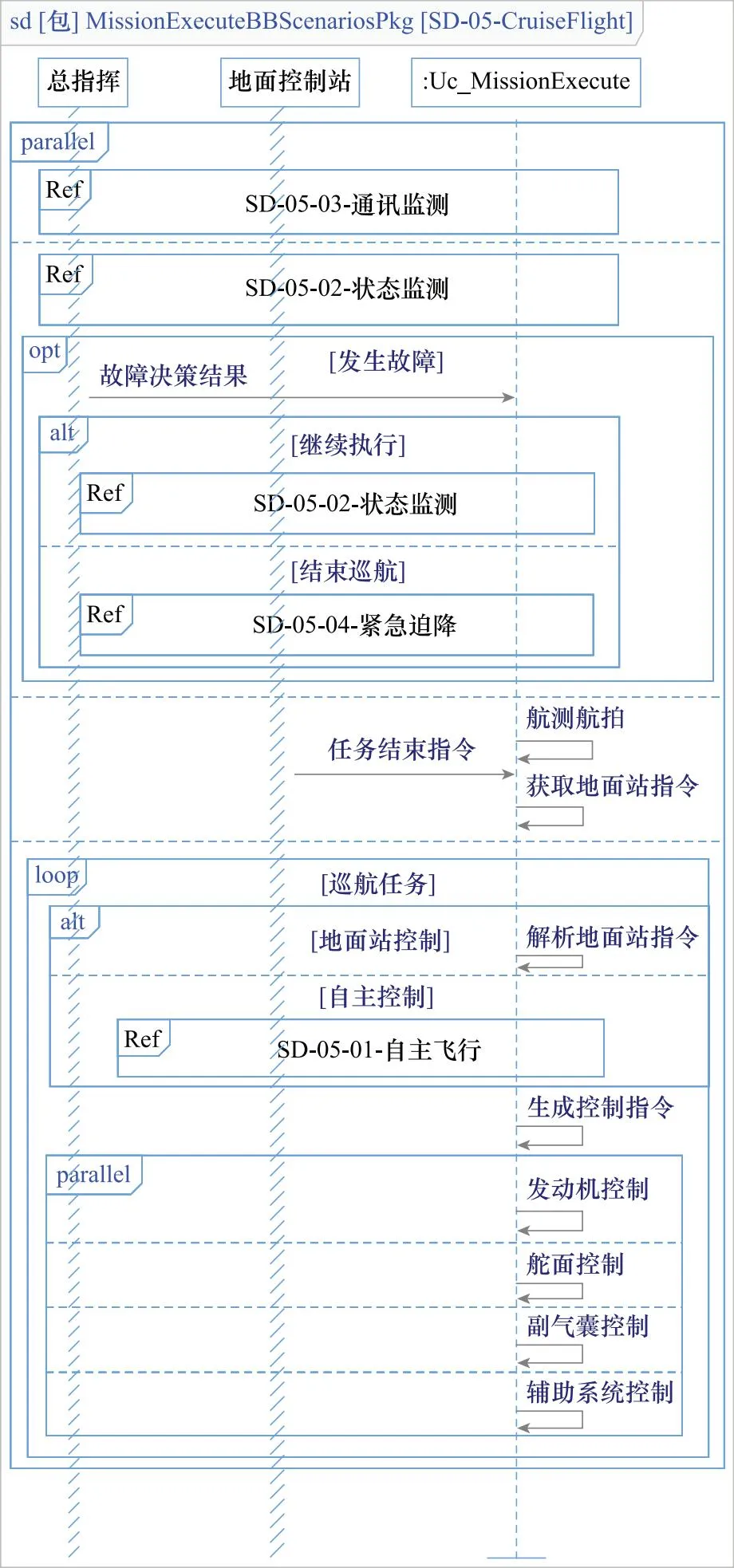
图6 任务飞行时序图Fig.6 Sequence diagram of mission flight
3.2 基于状态机的运行概念执行与需求验证
第3.1节基于活动图、时序图和内部块图完成了无人飞艇的运行场景设计,本节通过运行场景的状态机视角,对运行场景的执行逻辑进行验证。状态机图不同于活动图、时序图等行为图,其关注系统如何根据随时间发生的事件改变状态。模型通过遍历运行中的所有功能逻辑分支,判断状态跳转是否合理和符合条件、特情处置是否基于状态机运行,以此验证运行场景模型的逻辑正确性与操作完整性。
遍历状态机模型的另一个目的是验证利益攸关者需求的完整性。但随着模型的细化,前文利益攸关者需求与系统用例的关联关系已不能满足需求验证的要求,需将时序图下操作和状态机图下状态与系统用例承接的利益攸关者需求建立更加细化的〈trace〉关系,以通过状态机运行验证需求实现。部分操作和状态与需求清单的关联关系如图7所示。
在整个航测航拍运行过程中,各类事件对系统所产生影响的严重程度可以分为2级,即灾难性的(Ⅰ级)、严重的(Ⅱ级)。本节选取任务飞行过程无人飞艇发生Ⅰ级事故——地面控制站与飞艇数据通信功能丧失,展示整个特情处理与需求验证流程。
任务飞行阶段状态机图主要分为3个部分:航测航拍、系统故障诊断、通讯。① 航测航拍是无人飞艇运行的主要目的,主要分为捕获对象、数据存储与传输等子状态。在任务正常结束后,进入下一阶段;② 系统故障诊断主要是在飞行过程中,实时监测动力、电源、控制等各个分系统的状态。在发生故障时,根据故障等级与类型采取相应的应急措施;③ 通讯部分主要是在通讯正常的情况下,通过获取地面站命令、选择飞行模式、生成控制指令,以发动机、副气囊、舵面等控制无人飞艇完成相应的动作。而在通讯失效时,无人飞艇则会进入失联自动控制程序,随后进行紧急迫降。
因航测航拍场景过于复杂,以上活动图与时序图只对任务中的部分阶段进行了呈现,接下来借助内部块图(见图8),以全视图视角展示航测航拍用例与外界的交互关系。
执行状态机图如图9所示,在任务飞行执行航测航拍任务时,地面控制站与飞艇数据通信功能丧失,无人飞艇进入失联自动控制状态。
与此同时,地面总指挥注意到地面控制站在预定时间内数据没有更新,且指令上行没有任何响应或者飞控计算机在连续若干周期内都没有收到上行数据时,会判定地面控制站与无人飞艇的数据通信功能已经失效,然后立刻通知空管部门,报告故障情况。同时,总指挥利用故障前航线信息,判断无人飞艇的自动返航路径及时间,并设置多个观察岗位,目视观察飞艇动向,在确定无人飞艇可能降落的地点以后,组织地面人员迅速前往并报告消防力量请求援助,具体如图10所示。
通过起飞阶段的状态机执行,验证了该无人飞艇系统满足任务飞行、飞行控制和应急情况处理等利益攸关者需求。结合现有的利益攸关者需求清单与起飞过程状态分析结果,可进一步补充和完善通讯备份、自主控制飞行与降落等相关需求,从而不断迭代运行概念模型与利益攸关者需求清单,直至两者达到最优状态,为后续确定设计方案提供参考。

图7 关联利益攸关者需求与状态机图Fig.7 Diagram of correlation of stakeholder requirements and state machine diagram

图8 航测航拍用例接口与端口Fig.8 Interface and port of aerial survey and photography use case

图10 通讯失效时总指挥状态机图模型执行动画展示Fig.10 Animation display of the overall command state machine diagram model execution in case of communication failure
3.3 模型优势
在对流层无人飞艇运行概念分析过程中,本文使用模型代替文本,建立了可追溯到利益攸关者需求的运行场景模型,并基于状态机图对运行场景执行逻辑和需求的正确性与完整性进行了验证。该方法有效解决了传统基于文本描述方法存在的问题:
(1) 通过Gateway模块,集成DOORS与Rhapsody软件接口,建立了利益攸关者需求与系统用例的追踪关联关系,保证了运行概念分析对利益攸关者需求的设计可追溯性。
(2) 针对文本描述设计一致性较差、容易产生歧义等问题,本文使用SysML半形式化图形建模语言,基于活动图、时序图、内部块图等不同视角全面、立体地描述无人飞艇的运行场景。
(3) 通过运行对流层无人飞艇运行概念状态机模型,验证了无人飞艇在运行过程中操作流程的正确性,解决了静态文本缺乏验证手段的局限性。同时,在状态执行中,结合面临的实际问题可进一步完善补充利益攸关者需求清单。
4 结 论
本文将MBSE方法引入对流层无人飞艇运行概念研究中,重点探讨了传统基于文本的运行概念研究方法的局限性与MBSE方法的优势,提出了基于MBSE的对流层无人飞艇运行概念模型设计流程。首先,通过供应链中上下游关系识别利益攸关者并建立利益攸关者需求清单,并与系统用例建立追踪关联关系。然后,基于活动图与时序图进一步细化用例,建立无人飞艇航测航拍运行场景模型。最后,建立状态机图,通过地面控制站与飞艇数据通信功能丧失的特情处理流程动态演示,验证运行模型的执行逻辑,并进一步验证与完善了利益攸关者需求。
本文提出的基于MBSE的对流层无人飞艇运行概念模型设计方法,使用模型代替文本,往上承接利益攸关者需求,往下通过运行状态机图遍历运行中所有功能逻辑分支以进一步补充完善需求,较好地解决了之前方法所带来的难以保证设计可追溯性、精确性较差、方案验证较难等问题,并且该方法逻辑性、适用性和可行性较强,可适当推广至其他系统的运行概念分析过程。
猜你喜欢
绿色科技(2022年18期)2022-10-20
社会观察(2021年3期)2021-11-15
区域治理(2021年14期)2021-08-11
科技视界(2020年24期)2020-08-26
东坡赤壁诗词(2017年3期)2017-07-05
载人航天(2016年4期)2016-12-01
太空探索(2016年12期)2016-07-18
成都信息工程大学学报(2016年6期)2016-06-01
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07