基于NESO-LFDC的四旋翼无人机滑模姿态控制
2024-03-05 10:22郑柏超
系统工程与电子技术 2024年3期
桂 洋, 郑柏超,2,*, 高 鹏
(1. 南京信息工程大学自动化学院, 江苏 南京 210044;2. 江苏省大气环境与装备技术协同创新中心, 江苏 南京 210044)
0 引 言
近年来,无人机因其结构简单、可悬停以及机动性强等优点而备受关注。作为无人机的代表之一,四旋翼无人机广泛应用于环境检测、基础设施监管、军事侦察、航空摄影、农业保护等领域[1-2]。目前,四旋翼无人机的姿态控制方案种类繁多,常用方法有比例-积分-微分控制[3-4]、自适应控制[5-6]、自抗扰控制[7]和滑模控制[8-10]。应注意的是,四旋翼无人机系统中存在模型不确定性以及外界未知干扰,使闭环系统不稳定。
滑模控制因其结构简单、鲁棒性强,已经在四旋翼无人机控制系统设计中得到广泛应用,但基于传统滑模控制方案的无人机系统状态在接近平衡点时的收敛速度非常慢且收敛时间不能确定[11-12]。为此,文献[13]提出一种终端滑模控制方法,能保证无人机系统状态在有限时间内收敛。进一步,为提升终端滑模控制的收敛速度并避免控制奇异性问题,文献[14-15]设计了基于非奇异快速终端滑模控制方法的飞行控制方案。其不足之处在于控制过程在复杂扰动环境中仍无法避免抖振发生。
主动抗干扰控制通过对扰动的估计与补偿,实现消除或减弱扰动对系统性能的影响。扩展状态观测器(extended state observer, ESO)在主动抗干扰控制中起着关键作用[16-17],其主要功能是将系统的扰动项扩展为新的状态以进行估计。文献[18]开发了基于跟踪微分器和ESO的滑模控制方案来处理四旋翼的轨迹跟踪控制问题,其参数设计依赖于未知扰动的信息。在文献[19-20]中,提出一种线性ESO(linear ESO, LESO)使参数的选取更加独立,其中文献[20]的LESO与低频干扰补偿器(low-frequency disturbance compensator, LFDC)结合获得干扰补偿值,对总干扰的低频分量进行补偿。在文献[21]中,设计了非线性ESO(nonlinear ESO, NESO)与复合非线性控制器结合的控制方法。与文献[19-20]相比,NESO在面对未知干扰有着更好的观测性能,且峰值较明显小于LESO,但其对扰动的直接补偿,干扰估计值的误差在面对突发扰动时会剧增,引起系统抖振。
为提升四旋翼无人机抗干扰能力和响应速度,本文结合NESO和非奇异快速终端滑模控制的优点,提出一种基于NESO-LFDC的非奇异快速终端滑模控制方法。其中,内环设计上,结合NESO与LFDC获取干扰补偿值,直接补偿总干扰的低频分量。外环设计跟踪微分器和可变切换增益的非奇异快速终端滑模控制器,用于补偿虚拟干扰估计值的误差和总干扰的高频分量。NESO提升扰动估计性能,与LFDC的构成的控制器可以获得更精准的干扰补偿值,补偿总干扰的低频分量,相较于传统NESO对总干扰的直接补偿[21],本文对扰动的处理避免了干扰估计值的误差在面对突发扰动时会剧增,导致系统抖振。跟踪微分器的设计提供了平滑可调的目标跟踪信号以及导数,从而避免高频振荡;与带有可变切换增益的非奇异快速终端滑模控制器的结合,相比文献[20]提升了姿态跟踪的响应速度。内外环控制器实现了四旋翼无人机在面对突发扰动有着更强的抗扰能力及更快的姿态跟踪性能。
1 四旋翼无人机数学模型
四旋翼无人机是一个欠驱动、强耦合的非线性系统,主要依靠四个螺旋桨转速的不同来提供不同的推力已完成各种运动。根据参考文献[22-23],姿态动态模型如下:
(1)
(2)
(3)

下面给出了所提控制方法的体系结构,以滚转角为例设计控制器,整个控制系统结构如图1所示。

图1 控制系统结构图(以滚转角子系统为例)Fig.1 Control system structure diagram (taking roll angle subsystem as an example)

(4)

(5)
由式(5),动态模型式(4)可以重新表示为
(6)
式中:fφv(t)∈R是一个衍生扰动,称为虚拟干扰,有:
(7)


(8)
(9)

(10)
(11)
(12)
式(7)重写为
(13)

2 内环控制器设计
2.1 NESO
在这一部分中,设计NESO能够观测系统的状态变量和虚拟干扰x3(t)。根据参考文献[24],对于动态模型式(10)~式(12),NESO设计如下:
(14)
(15)
(16)

(17)
(18)
(19)
式中:g1(χ)=ξ(χ)τ;g2(χ)=ξ(χ)2τ-1;g3(χ)=ξ(χ)3τ-2。


引理 2存在正常数λi(i=1,2,3),β和连续的正定函数V1∈R,满足:



定理 1当满足引理1和引理2的情况下,对于估计误差动态系统式(17)~式(19),有如下结论成立:


其中:i=1,2,3;N为任意正常数;H=D1βλ2/λ1λ3是一个有界正常数。

(20)
由式(20)可知:
(21)
于是有:
(22)
则估计误差满足:
(23)
由式(23)可以得出:
(24)
在不等式(23)中,对于任意正常数N,当t∈[N,∞)时,对ε取极限可以得到
此时,存在虚拟干扰估计值的误差|e3(t)|≤D2∈R+。从不等式(24)得,若取ε为充分小的正数,对t取极限为
证毕
较大的突发扰动会引起系统抖振,造成姿态收敛速度减缓[26-27]。本文将NESO引入在四旋翼无人机的设计中,相比于文献[20]中的LESO,不仅有效的衰减干扰,且估计值更加准确,令总干扰的低频分量和高频分量补偿更加精准,改善了四旋翼无人机的姿态跟踪性能。
2.2 LFDC算法
(25)
式中:kw∈R,δ∈R是正可调系数;sat(c1,c2)定义为

根据式(13)、式(25)和虚拟干扰估计的误差e3(t),可得
(26)
根据式(13)、式(26)和虚拟干扰估计的误差e3(t),得
(27)


3 外环控制器设计
3.1 跟踪微分器
参考信号在传输过程中,容易受到噪声的影响。跟踪微分器具有令人满意的频率滤波器响应,对高频振荡有明显的限制,其表示为
(28)

(29)
式中:h>0为采样周期;fst(·)可以定义为
(30)
(31)
(32)
(33)

3.2 非奇异快速终端滑模控制器设计
本节设计基于NESO-LFDC和跟踪微分器的非奇异快速终端滑模控制器。对于动态模型式(10)和式(11),设计如下非奇异快速终端滑模面:
(34)

滑模控制器设计为

(35)


(36)
定理 2对于滚转角子系统式(8)和非奇异快速终端滑模面式(34),设计控制输入式(36),在NESO式(14)~式(16)和LFDC式(25)有效的情况下,跟踪误差eφ(t)一致最终有界。
(37)
根据式(35)

(38)
情况 1|sφ(t)|≥λ和以下不等式成立:
(39)
可以得出:
(40)
那么当t→∞时,不仅得到|sφ(t)|≤λ,还可以推出

情况 2在|sφ(t)|≥λ且式(39)不成立,式(38)为

(41)
(42)
在这种情况下跟踪误差eφ(t)可以收敛到与k1,k3,k4和λ相关的可调范围。
情况 3在|sφ(t)|≤λ的情况下,|eφ(t)|满足
(43)
在这种情况下,跟踪误差eφ(t)可以收敛到与k1和λ相关的可调范围。
证毕
由以上3种情况可知,跟踪误差eφ(t)一致最终有界,系统稳定,因此本文选取的滑模控制器是有效的。
4 实验验证
为了测试本文所设计的四旋翼无人机姿态的抗扰与跟踪性能,根据本文的模型和控制器算法,分别设计了两组仿真实验。此外本文方法与方法1[21](基于NESO的控制)和方法2[20](基于LESO-LFDC的滑模控制)进行比较。四旋翼无人机物理参数选择如表1所示,内外环控制器仿真参数如表2所示。

表1 四旋翼无人机物理参数Table 1 Physical parameters of quadrotor unmanned aerial vehicle

表2 内外环控制器仿真参数Table 2 Simulation parameters of inner and outer ring controllers
4.1 控制系统抗干扰实验
无人机在执行任务时总会遇到各种干扰,因此抗干扰性对无人机来说极为重要,本节设计了控制系统抗干扰实验。



图2 姿态角随时间的变化(情景1)Fig.2 Change of attitude angle with time (Scenario 1)

图3 干扰补偿值、虚拟干扰估计值和可变切换增益随时间的 变化(情景1)Fig.3 Disturbance compensation values, virtual disturbance estimatesand values and variable switching gain with time (Scenario 1)

图4 控制输入的仿真结果(情景1)Fig.4 Simulation results of control input (Scenario 1)


图5 姿态角随时间的变化(情景2)Fig.5 Change of attitude angle with time (Scenario 2)

图7 控制输入的仿真结果(情景2)Fig.7 Simulation results of control input (Scenario 2)
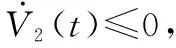
4.2 控制系统跟踪性能实验
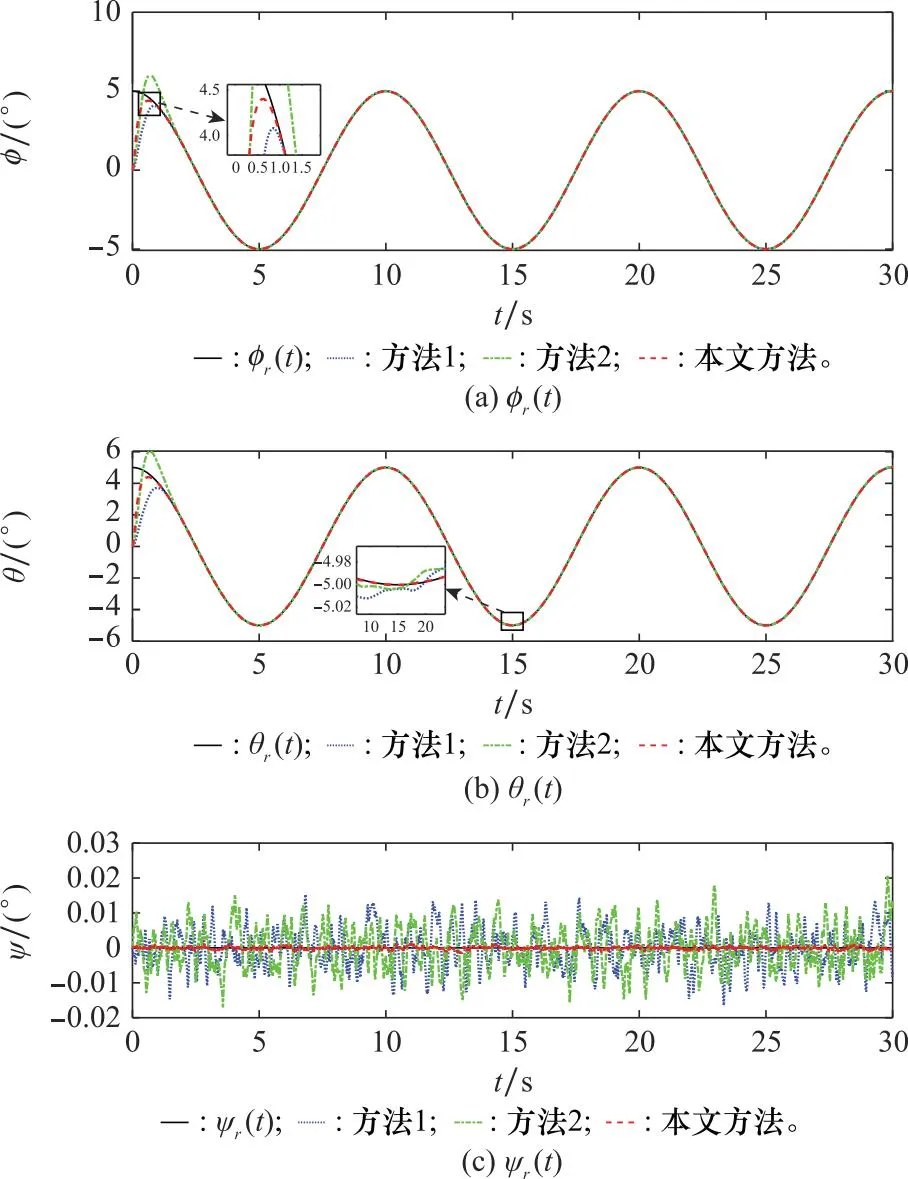
图8 姿态角随时间的变化(情景3)Fig.8 Change of attitude angle with time (Scenario 3)
图9 干扰补偿值、虚拟干扰估计值和可变切换增益随时间的 变化(情景3)Fig.9 Disturbance compensation values, virtual disturbance estimatesand values and variable switching gain with time (Scenario 3)

图10 控制输入的仿真结果(情景3)Fig.10 Simulation results of control input (Scenario 3)
5 结 论
本文所提出的基于NESO-LFDC的四旋翼无人机非奇异快速终端滑模姿态控制,改善了四旋翼无人机的抗干扰以及提升姿态跟踪性能。NESO与LFDC结合,设计在内环中以估计干扰补偿值并直接补偿总干扰的低频分量。外环采用跟踪微分器和具有可变切换增益项的非奇异快速异终端滑模控制器间接补偿虚拟干扰估计值的误差和总干扰的高频分量。仿真结果表明,本文设计的控制算法减少了虚拟干扰估计值的误差的影响,保证了受扰四旋翼无人机姿态的高精度跟踪,提高了四旋翼无人机的抗干扰性能,加快了姿态跟踪的响应速度。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
中学生数理化·高一版(2019年12期)2019-12-31
电子制作(2019年9期)2019-05-30
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
当代石油石化(2018年1期)2018-08-10
中国钢铁业(2018年6期)2018-07-26
北京航空航天大学学报(2016年8期)2016-11-16