软件定义云边协同架构下的水下监测新机制
2024-03-05 10:22金志刚苏毅珊羊秋玲
系统工程与电子技术 2024年3期
金志刚, 洪 叶, 苏毅珊,*, 羊秋玲
(1. 天津大学电气自动化与信息工程学院, 天津 300072;2. 海南大学计算机科学与技术学院, 海南 海口 570228)
0 引 言
海洋是生命的摇篮和地球资源的宝库[1-2]。近年来,国内海洋监测得到迅速发展,浮标监测网、水质自动监测站等技术设备被广泛应用于海洋监测网中;国外也进行了相关的研究,如日本地震和海啸海底观测密度网络(dense oceanfloor network system for earthquakes and tsunamis, DONET)与美国大型海底观测计划(ocean observatories initiative, OOI)[3]。为响应建设海洋强国的号召,应加快对海洋监测的研究。
水声传感器网络(underwater acoustic sensor networks, UASNs)是海洋监测的关键技术,其已在环境监测、资源勘探等领域得到了广泛应用[4]。传统UASNs结构有二维和三维网络[5],根据传统开放式系统互联通信参考模型(open system interconnection reference model, OSI)和传输控制协议/网际协议(transmission control protocol/internet protocol, TCP/IP)模型自下而上设置为物理层、数据链路层、网络层、传输层及应用层[6]。而UASNs大多依赖于硬件基础设施,相关协议及应用在部署之前就固化在节点的硬件存储器中[7],可控性及灵活性较差。为满足水下多样化监测任务的需求,迫切需要设计新型、智能且灵活的水声传感器监测网。
软件定义网络(software defined network, SDN)是一种新的集中式管理技术,将路由器的控制平面与数据平面分离[8-9]。在无线传感器网络(wireless sensor network, WSN)领域,基于SDN的研究较为成熟。文献[10]设计了一种基于软件定义WSN的能量路由算法,路由算法在控制器中运行,每个节点总是与其距离最近的节点进行通信,该研究验证了基于SDN的WSN路由协议比传统的WSN路由协议具有更好的性能。文献[11]将强化学习应用于软件定义WSN的路由路径优化,利用SDN控制器进行路由决策,实现了控制平面与数据平面的分离,并延长了网络的生命周期。而将SDN与UASNs结合是目前的重点研究方向之一,文献[12]定义了一种水下SDN体系结构,该体系结构可轻松结合新的水下通信解决方案,提高网络的健壮性和能效。文献[13]提出一种基于软件定义的多自主水下航行器(autonomous underwater vehicle, AUV)UASNs模型,提高了UASNs的可扩展性和可控性。文献[14]提出基于SDN的能量感知路由,利用SDN提出的集中式解决方案解决了UASNs低效以及不协调的信道接入导致的问题,并通过实验表明该研究在可靠性、时延、能效、寿命和公平性方面比传统路由协议表现更佳。将SDN应用于UASNs进行海洋监测,可解决传统UASNs监测存在的问题。
此外,目前常见的海洋监测方法有卫星遥感、海底观测等,遥感卫星只能对海表进行大范围的监测,而UASNs仅在水下展开监测且面临着复杂多变的海洋环境[15-16]。所以,单一的监测方式无法完成全方位立体的海洋监测。
本文首先提出一种监测网络架构,通过控制器将集中式云中心的功能部署至底层传感器及边缘控制器上,并对网络进行分级控制;其次,基于该架构提出一种以水下监测为主联合低轨遥感卫星监测的多级协同水下监测(multilevel collaborative underwater monitoring, MLCUM)机制。该机制先通过低轨卫星进行大范围监测,随即展开二级小范围水下监测及水下联合监测。本文提高了网络的可扩展性及灵活性,减少了数据流量,降低了传输时延及能耗,实现了多监测任务的切换及对海洋的全面监测,满足了海洋监测多样化应用的需求。
1 系统模型
1.1 水下软件定义监测网络架构
本文首先构建了一种水下软件定义监测网络(underwater software defined monitoring networks, USDMN)系统架构,如图1所示。

图1 USDMN架构Fig.1 USDMN architecture
底层为智能感知层,由多种智能感知设备及AUV组成;中间层为边缘控制层,由主要控制节点(sink控制节点)以及具备边缘处理功能及控制功能的边缘控制节点组成;最上层为应用层,由低轨遥感卫星、地面数据中心及云数据中心组成。本文架构允许应用层的下行数据和边缘控制层的上行数据进行交互通信[17],通过SDN来管理网络并简化边缘计算架构的复杂性,使相对简单的边缘设备免于决策复杂的网络活动,如业务切换、流量控制等,具体设计如表1所示。

表1 网络结构设计Table 1 Network structure design
感知数据在原位置按照Open Flow协议定义的流表[18]进行原位处理,之后中继至边缘控制节点进行预处理[19],然后将处理结果上传至陆地数据中心及云数据中心,继续进行深度处理,并根据分析结果下发控制命令,使底层智能传感器进行特定数据的收集,最终实现全方位分层立体的广域海洋监测。
水下延迟包括5部分:sink控制节点向下进行功能部署的延迟TSDN、智能传感层向边缘控制节点传输延迟Tend-edge、智能传感层进行原位处理的延迟Tpreprocess、边缘处理的延迟Tprocess、边缘控制节点向云中心传输的延迟Tedge-cloud。其中,TSDN包括sink节点向边缘控制节点部署的延迟Ts-edge以及边缘控制节点向智能传感设备部署的延迟Tedge-end,Tend-edge又分为感知数据中继延迟Trelay和AUV移动延迟TAUV,总延迟为
Tdelay=TSDN+Tend-edge+Tpreprocess+Tprocess+Tedge-cloud
(1)
TSDN=Ts-edge+Tedge-end
(2)
Tend-edge=Trelay+TAUV
(3)
在能耗模型中,N和M分别表示节点发送和接收数据包的数量,Cξ为数据发送能耗,Cφ为数据接收能耗,Epre为智能传感层原位处理的能耗开销,Epro为边缘处理任务的能耗开销,sink节点间发送接收数据包的能耗为Ebetween。因此,能耗模型需要满足以下要求:
Etotal=Eξ+Eφ+Epre+Epro+Ebetween=
NCξ+MCφ+Epre+Epro+Ebetween
(4)
1.2 多业务切换机制
该架构中sink控制节点作为SDN主控制器,可完成路由计算、网络拓扑管理、监测业务切换等管理任务。边缘控制节点作为次控制器仅对其控制域内的节点进行管理,将部分数据处理任务部署至智能终端传感设备,并完成上级控制器部署的数据处理任务。
此外,通过网络功能虚拟化可完成网络资源切片,从而实现网络资源的按需灵活分配,极大地增强了网络的灵活性[12]。因此,当有不同业务需求时,可下达指令至USDMN的sink控制节点以进行业务分析并将拓扑调整、流量配置等策略通过东西向接口发送给边缘控制节点,边缘控制节点再将相应的网络结构变动按照Open Flow协议以流表的形式部署至智能传感设备,传感设备按照所部署的流表进行网络功能切换及必要的拓扑调整。该监测架构实现了根据任务需求的监测任务切换,并可通过移动的AUV及深度可调节传感设备[20]完成整个网络基础设施的重新部署,具体流程如图2所示。
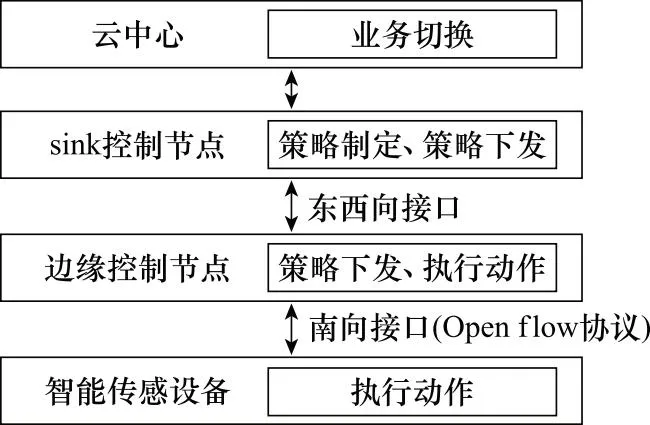
图2 多业务切换示意图Fig.2 Multi-service switching schematic diagram
具体来说,在收到业务转换需求时,云中心通过无线电链路向sink控制节点发送指令。当新业务不需要网络重新部署时,sink控制节点便直接下发指令调动新业务模块,边缘控制节点收到指令后将数据预处理算法转换至新业务数据的处理体系并将控制指令下发至其控制域内的底层智能传感器节点上,底层传感器接收到控制指令后进行响应并根据控制指令做出相应的变化,收集的数据类型及原位处理算法也转换至新业务相关;当新业务要求网络重新部署时,网络中的节点除以上所有变化外,再根据sink控制节点计算得出的新拓扑策略进行重新部署。与通过船舶投放节点来实现新的监测任务相比,基于SDN的业务切换机制节省了大量的人力和物力资源。
1.3 MLCUM机制
MLCUM机制如图3所示,先利用低轨遥感卫星对大规模海域进行异常筛查,若发现异常,则由云数据中心通过控制器向智能传感设备下发指令,进行信息采集并处理分析,生成二级监测结果。确认异常后,通过sink节点告知相邻的监测网络进行水下联合异常监测。该机制实现了基于SDN的云洋协同海洋监测。

图3 MLCUM机制Fig.3 MLCUM mechanism
1.3.1 低轨遥感卫星监测
海洋遥感利用传感器实现对海洋的远距离非接触观测,以获取海洋要素的图像或数据[21]。遥感卫星可搭载多种具有不同功能的传感器,如云遥宇航研发的星载全球导航卫星系统(global navigotion satellite system, GNSS)反射探测载荷[22],以提供海洋监测数据从而对海洋进行多方位的监测。目前,海洋遥感监测主要应用于海洋环境灾害及海洋地质灾害的监测,不同遥感卫星或其所搭载的不同功能的传感器可以获取大量的水温、海流、海水污染等图像或数据[23],基于这些信息可对海洋灾害进行监测。
水温是影响海洋环境的重要因素[24],因此低轨遥感卫星可对海表温度进行监测,获取实时海表温度,以实现海洋环境的实时监测。美国国家海洋和大气管理局提供了对珊瑚礁的监测方法[25],利用低轨遥感卫星获取的5 km海表温度值得到周热度指数和热点指数,将得到的指数值按照珊瑚礁白化警报级别判断标准给出其白化预警结果。大气温度及海浪海波的状态变化是海洋地质灾害的主要表现,海洋地震发生前,震中位置的大气温度折线图会出现“蝴蝶形”特殊曲线形状[26],因此可通过星载GNSS反射探测载荷卫星对海洋大气温度进行监测,若大气温度折线图出现特殊形状,则产生灾难预警,以此来达到海洋地震监测的目的。
1.3.2 二级小范围水下监测
二级小范围监测的关键在于智能传感层与边缘控制层的信息交互与处理。传统UASNs收集完数据以时间触发的方式全部上传。但上传数据中包含大量的正常数据,使网络负载过大,降低其整体性能。因此,在边缘端对数据进行处理,可避免不必要的传输和浪费,数据驱动的异常数据检测如图4所示。

图4 数据检测流程图Fig.4 Data detection flow chart
部署在底层的智能传感设备具有感知数据的能力并可对数据进行原位处理来判断是否出现异常,然后联合AUV进行协同分析。若判断为正常,则原位存储不再上传;若数据异常,则边缘控制节点通知AUV收集数据进行判断。若AUV判断数据为正常,则其对智能传感设备展开故障检测;否则上传至边缘控制层进行下一步处理,并将处理结果上报至数据中心。该监测方法需要提前将数据异常判断的标准设置在底层智能传感设备中,如海水pH值、温度等指标。
1.3.3 水下联合监测
在进行水下联合监测时,小范围海洋监测网络架构共用同一云端,不同网络之间通过sink控制节点进行无线电通信。
具体示意图如图5所示,当一小范围网络监测到异常且sink控制节点接收到数据异常的确认消息后,sink节点立即向相邻监测网络广播异常信息并启动联合监测,使其对本监测区域进行数据收集并检测是否存在异常情况,数据检测方法与二级小范围水下监测相同。

图5 水下联合监测示意图Fig.5 Underwater joint monitoring schematic diagram
2 实验性能与评价
本节通过仿真软件进行数值仿真实验来评估本文的工作:首先分析MLCUM机制对异常数据的平均处理时间和传输能耗的影响;其次评价在不同传输方式下,本文架构与传统架构在总能耗、端到端延迟以及包投递率3个指标上的表现;最后,更换实验场景来说明本文架构的灵活性,可满足不同监测任务的需求。
2.1 实验场景设置
本实验选取20 000×20 000×5 000 m3的三维网络作为海洋灾难监测的场景,部署了300个传感器节点,其中包括智能传感设备以及边缘控制节点,并在水面共布置4个位置已知的sink控制节点,用于控制指令的下发以及区域间的信息交互,主要实验参数如表2所示。
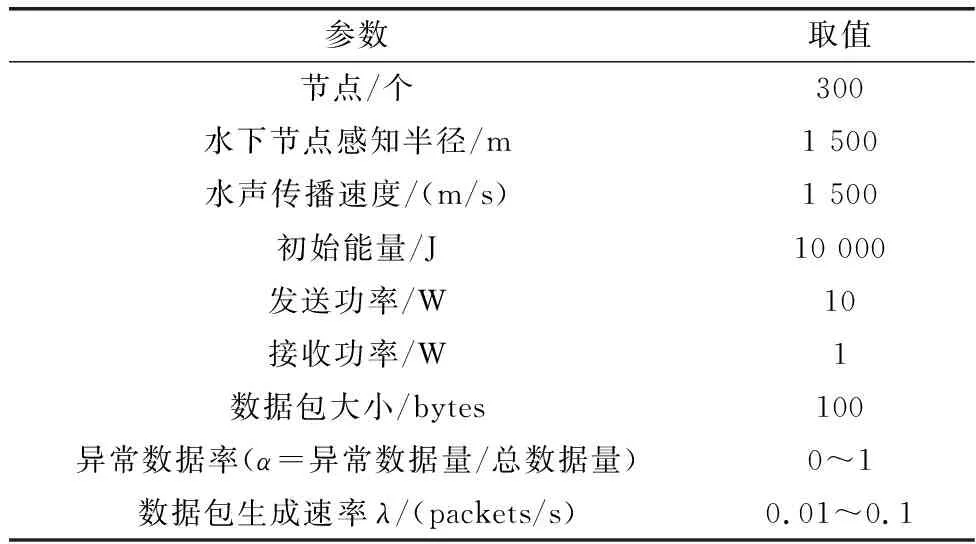
表2 实验参数设置Table 2 Experimental parameters setting
2.2 性能评价
2.2.1 监测机制评价
本文所提出机制的重点在各个部分的数据处理、传输及交互,经典的路由协议基于矢量的逐跳转发协议(hop-by-hop vector based forwarding,HHVBF)可以很好地检测UASNs转发数据时的性能,因此采用HHVBF来完成数据的传输。
本实验数据包生成速率为0.1 packets/s,α在[0,1]内变化,其中0为数据无异常,1为全异常。表3显示了α为0.5时的异常数据平均处理时间,本文所提出的数据驱动的异常数据分散处理方法需要2.375 s。这是因为SDN将异常判断及数据处理功能分别部署至智能传感设备及边缘控制节点上,距离数据源更近。将异常数据传输至水下的边缘端进行处理比传统的将全部数据上传至水面数据中心进行处理所需要的跳数少,这样可以避免数据包碰撞和重传,缩短时延,减轻数据中心的压力。

表3 异常数据平均处理时间Table 3 Average processing time of abnormal data s
图6表示本文所提出的数据处理方法与传统的数据处理方法在不同异常数据率的情况下传输能耗方面的差异,传输能耗为数据从数据源传输至数据处理地点所消耗的能量。两种处理方式的主要区别在于驱动方式、数据处理地点以及处理数据类型:传统数据集中处理是以时间触发的方式将收集到的所有数据全部上传至水面数据中心进行处理,而新型数据分散处理是以数据驱动的方式只将异常数据传输至水下边缘设备进行处理。数据驱动的异常数据检测方法只有当数据出现异常时才会将数据上传,而异常数据是少量的,剩余正常数据原位存储一段时间后丢弃,因此本文所提出方法的传输能耗明显低于传统方式。随着α的增加,异常数据量不断增加,本文方法的传输能耗不断增加。当α为1时,本文方法与传统方式所需上传的数据量相等,因此传输能耗也相同。
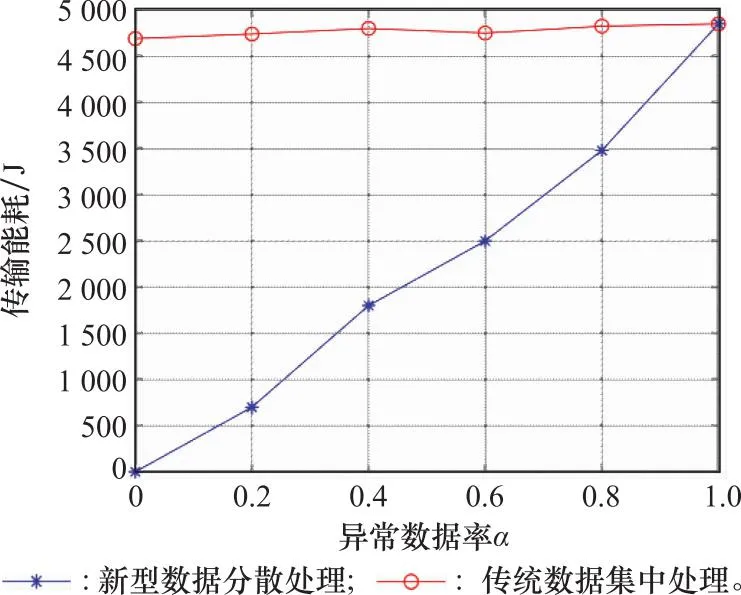
图6 传输能耗Fig.6 Transmission energy consumption
2.2.2 USDMN系统架构性能评价
本节对比了新架构与传统架构在不同中继协议下端到端时延、包投递率以及总能耗的性能,中继方式分别采用HHVBF协议[27]、基于深度调整的地理和机会路由(geographic and opportunistic routirg with depth adjustment, GEDAR)协议[28]以及基于Q学习的自适应路由(Q-learning based adaptive routing, QELAR)协议[29],且将异常数据率设置为0.3。
图7描绘了在不同传输方式下,本文新网络架构与传统网络架构的端到端延迟随数据包生成速率的变化情况,端到端时延为数据包从源端正确传输到接收端所需的时间。可以看出,在相同路由协议下,本文架构具有比传统架构更低的端到端时延,这是因为本文架构通过SDN控制器将数据处理任务部署至智能传感设备及边缘控制节点上。相比于传统架构在云端集中处理的方式,本文架构的数据处理地点更靠近数据源,处理响应速度更快。数据包生成速率越高,就越容易发生数据包的碰撞重传,从而延长了每种传输方式的端到端时延。此外,因为HHVBF相比于其他两种路由协议转发跳数更多,所以其端到端时延总是最大。

图7 端到端时延Fig.7 End-to-end delay
图8表示本文架构与传统架构在不同数据传输方式下的包投递率与数据生成速率的关系,包投递率为sink节点接收数据包数量与源节点发送数据包数量的比值。可以看出在相同路由协议下,本文架构的包投递率总是高于传统架构的包投递率。这是因为在本文架构中,SDN控制器进行不同传输方式的路由决策,再将最优路由表以流表形式部署至边缘端。sink控制器掌握全局试图并定期更新网络状态,采用预设的路由算法来寻找最优路径。路由决策在功能强大的控制节点上进行,路由计算的速度更快,且网络拓扑变化能及时被控制器发现,路由的收敛性更强[30]。水下节点除AUV外一般不主动运动,且水下移动速度缓慢,因此拓扑变化量与节点的通信范围相比较小。所以,通过SDN进行部署路由表比传统架构进行自主决策的方式效率更高,所以传输效率更高,包投递率也更高。每种传输方式的包投递率都随着数据生成速率的增加而减少,这是因为随着数据生成速率的增加,传输一定数量数据包时产生的碰撞会增加,因此损失的数据包增多,包投递率随之减小。GEDAR通过对无效节点的深度调整进行拓扑控制,其包投递率在这几种传输方式中最高。
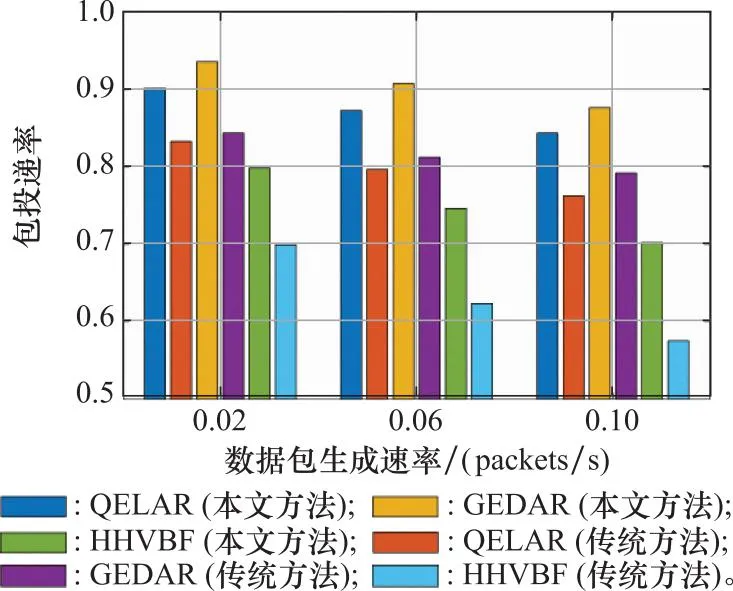
图8 包投递率Fig.8 Packet delivery rate
图9可以看出,本文架构与传统架构在不同数据传输方式下的总能耗与数据生成速率的关系,其中本文架构的总能耗包括数据收集能耗、数据处理能耗及数据传输能耗,传统架构的总能耗包括数据收集能耗及传输能耗。可以看出,本文架构的总能耗总是低于传统架构的总能耗。首先,本文架构通过SDN部署实现了数据的原位处理,数据处理地点更靠近数据源且只将异常数据上传,减少了数据的传输能耗;其次,本文架构数据处理传输的能耗小于传统架构将全部数据上传的能耗;最后,SDN将路由表部署至每个节点,节点按照路由表转发数据,减少了数据包自主转发时不必要的探索,且传输路由表给底层转发节点带来的传输负荷与其自主决策所消耗的能量相比给整体网络能耗带来的影响相对较小[14]。单位时间内数据生成速率越快,产生碰撞越多,能耗越高。但是在传输一定数量的数据包时发送时间对能耗的影响更大,因此当数据生成速率越快,所耗费的总时间越少,总能耗就越少,从而每种传输方式的总能耗都随着数据生成速率的增加而减少。

图9 总能耗Fig.9 Total energy consumption
当有监测任务更换的需求时,若需要对网络拓扑进行重新部署,则通过SDN下发指令移动网络设备进行该监测任务的执行。为验证所提出架构的灵活性,实验又进行了珊瑚礁监测的仿真实验,选择6 000×6 000×2 500 m3的仿真场景作为珊瑚礁监测的场景,与海洋灾难监测场景的不同之处主要在于场景范围的大小,其他实验参数如表2所示,仿真结果如表4所示。
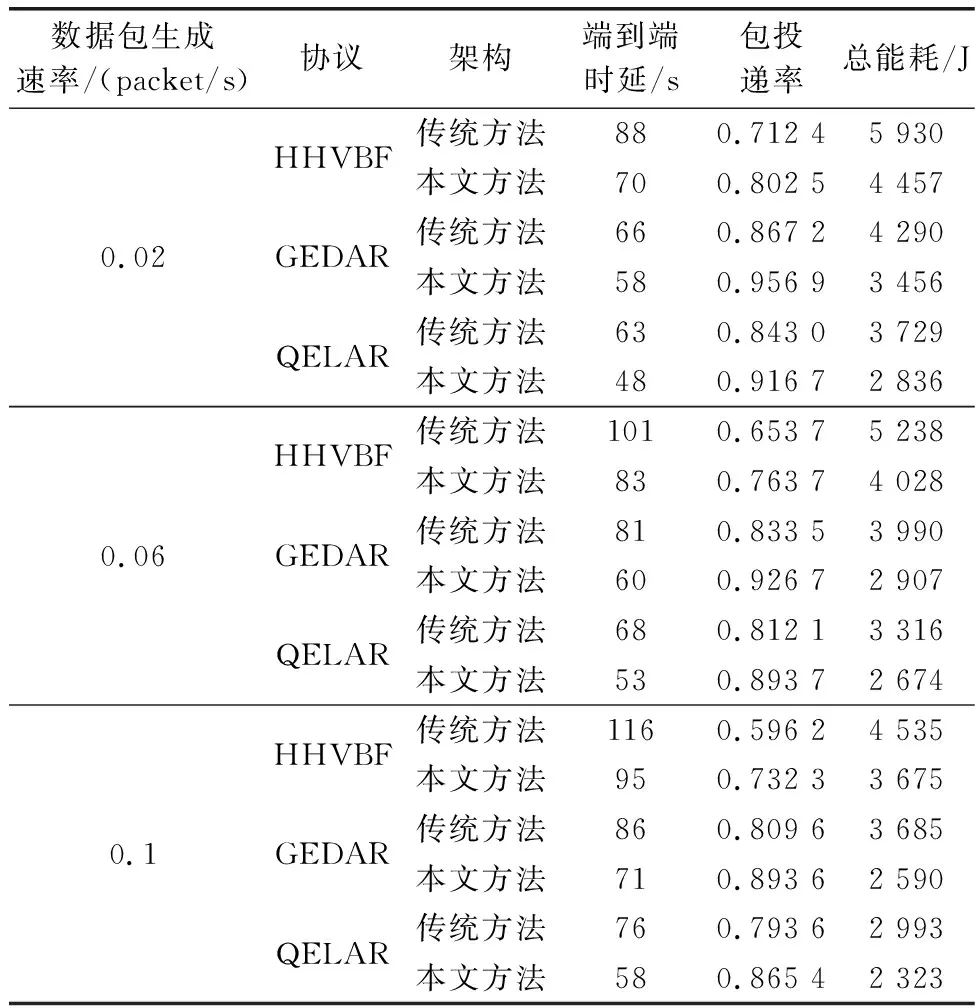
表4 珊瑚礁监测场景下的各项指标Table 4 Indicators under coral reef monitoring scenario
可以看出,本文架构在珊瑚礁监测场景中也有良好的表现,端到端时延、包投递率以及总能耗随数据生成速率的变化趋势与图7~图9中的变化大致相同。珊瑚礁监测场景范围相比地质灾害监测场景较小,节点密度更大,因此SDN按照路由协议进行路由表生成时,就能找到从源节点到sink控制节点跳数更少的路径,且可参与转发的邻居传感设备变多了,因此与地质灾害监测场景中的仿真结果相比,端到端时延有所减小、包投递率与总能耗都有所增加。表4说明本文架构可用于多个监测任务,且相比传统架构有更好的表现。
综上所述,本文所提出的USDMN系统架构在端到端时延、包投递率以及网络能耗方面与传统架构相比都有更好的性能。在更换场景后,该架构依然具有比传统UASNs更好的性能,验证了该架构可适用于不同的监测场景以执行多样的监测任务,说明了本文USDMN架构在灵活性方面的表现比传统UASNs架构更加突出,可以满足水下多样化监测任务的需求。
3 结 论
现有传统水声传感器监测网络灵活性、可控性较差,无法满足水下多样化监测任务的需求。因此,本文构建了一种基于软件定义的水下监测网络架构,通过SDN将数据处理功能部署至边缘端,可实现数据的原位处理及边缘处理。同时,基于该架构提出一种MLCUM机制,通过遥感卫星监测、小范围水下监测及水下联合监测实现了云洋联合的立体海洋监测。实验结果显示,本文提出的监测网络架构与监测机制提高了异常数据处理效率并降低了数据流量,在端到端时延、包投递率以及总能耗方面都有较大的提升,能够满足海洋多监测任务的需求,节省了资源。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
汽车工程(2021年12期)2021-03-08
网络安全和信息化(2018年3期)2018-11-07
电信科学(2017年6期)2017-07-01
通信产业报(2016年44期)2017-03-13
电测与仪表(2015年22期)2015-04-09
电测与仪表(2014年16期)2014-04-22
计算机工程(2014年6期)2014-02-28
河南科技(2014年5期)2014-02-27
雕塑(1999年2期)1999-06-28