高速置换索引差分混沌移位键控通信系统
2024-03-05 10:22蒋忠均
系统工程与电子技术 2024年3期
张 刚, 陈 茜,*, 蒋忠均
(1. 重庆邮电大学通信与信息工程学院, 重庆 400065; 2. 贵州省网络安全和信息化委员会, 贵州 贵阳 550000)
0 引 言
混沌信号由于其良好的特性,被广泛运用于扩频通信中。在以往的研究中,不少学者提出了一些相干和非相干的混沌通信系统,最早提出的一种混沌数字调制技术是混沌移位键控(chaos shift keying, CSK)[1-2],但由于其混沌同步问题尚未得到有效解决,因此在实际中应用较少。
为了绕开同步问题,文献[3]提出了一种非相干混沌数字调制技术——差分CSK(differential, DCSK),由于采用非相干方式接收信号,DCSK接收端并不需要信道同步,系统结构较为简单。该技术采用传输参考(transmitted-refe-rence, T-R)方法[4],将每个比特持续时间分为两个时隙,在第1个时隙中发送参考混沌序列,在第2个时隙中发送经数据比特调制的时延参考混沌序列。在接收端,参考序列与数据调制序列进行相关,以恢复发送比特。此调制系统无需完成信道估计和扩频码同步,优点是简化了系统结构,降低了实现成本。
但是,DCSK系统将一半的信号用来传输不携带信息的参考信号,传输效率较低。为了弥补DCSK的一些不足之处,学者们提出了采用索引值传输多进制信息的索引调制(index modulation,IM)系统[5-7]。文献[8]中提出了一种码IMDCSK(code IMDCSK, CIM-DCSK)系统,该系统应用扩频码与传输信息比特之间的映射,可以达到提高传输速率的目的。文献[9]中提出了一种结合空间调制(spatial modulation, SM)和码IM-扩频(code IM-spread spectrum, CIM-SS)两种常用的合理调制技术,该方案具有更快的数据速率、更低的传输功率和更好的误差性能。近几年,不少学者又提出了基于置换矩阵的IM技术。文献[10]中提出了一种置换索引DCSK(permutation index DCSK, PIDCSK)系统,通过置换矩阵形成多个准正交数据序列,消除了参考序列与承载数据序列之间的相似性。文献[11]中提出了一种差分PIDCSK(differential PIDCSK, DPIDCSK)通信系统,该系统在传输多进制信息时,使一个要发送的混沌序列代表当前已调制的多进制符号,并同时将其作为数据帧中下一个调制符号的参考信号。
为了提高数据传输速率,降低比特能量,本文提出了一种高速PIDCSK(high-rate PIDCSK,HR-PIDCSK)系统,在该系统中,采用置换矩阵传输多进制信息,再缩短参考信号的长度。利用高斯近似[12](Gaussian approximation, GA)法推导系统在多径瑞利衰落信道[13]以及加性高斯白噪声(addictive white Gaussian noise, AWGN)信道[14]中的误码率公式,并进行蒙特卡罗仿真[15]以验证其准确性。
1 系统模型
1.1 HR-PIDCSK发送端
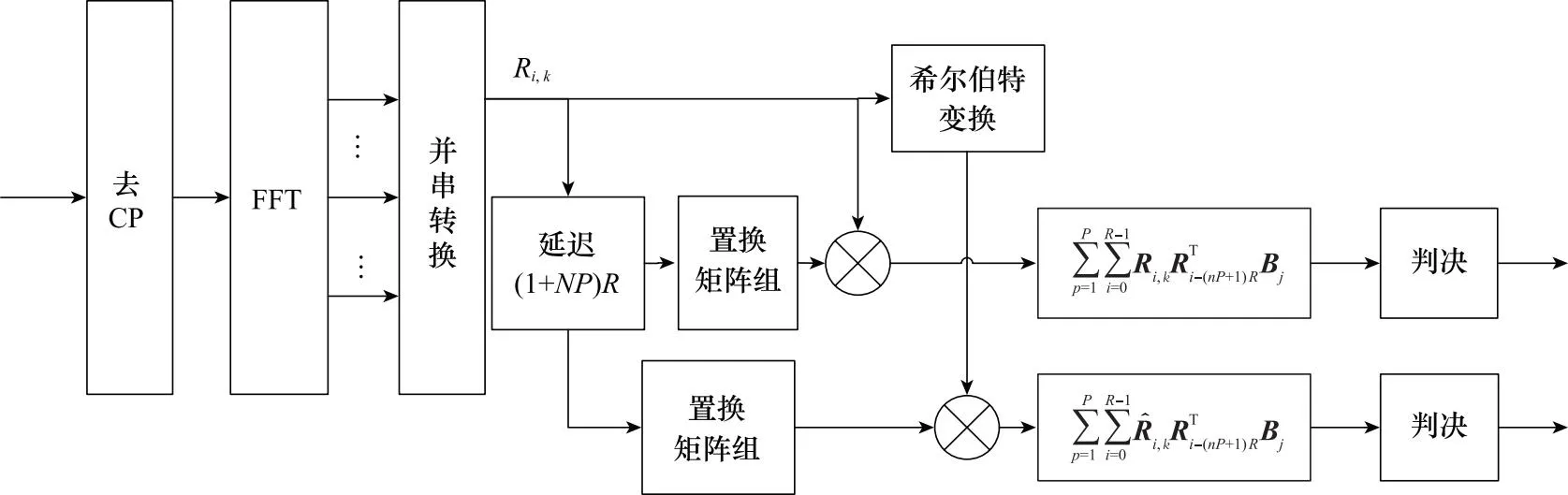
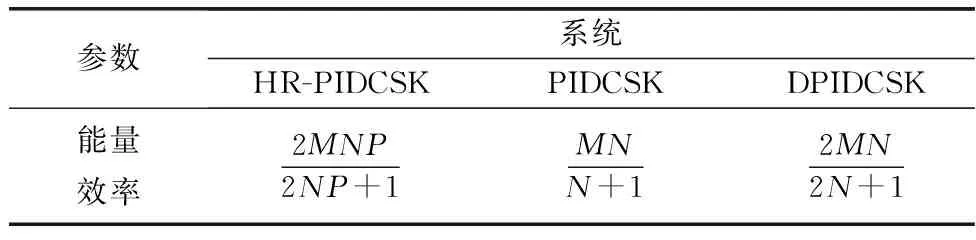
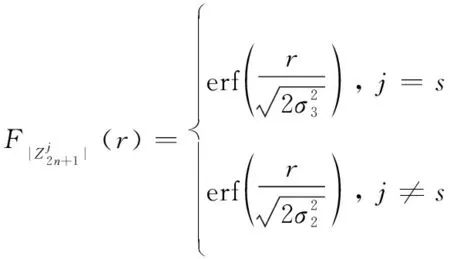
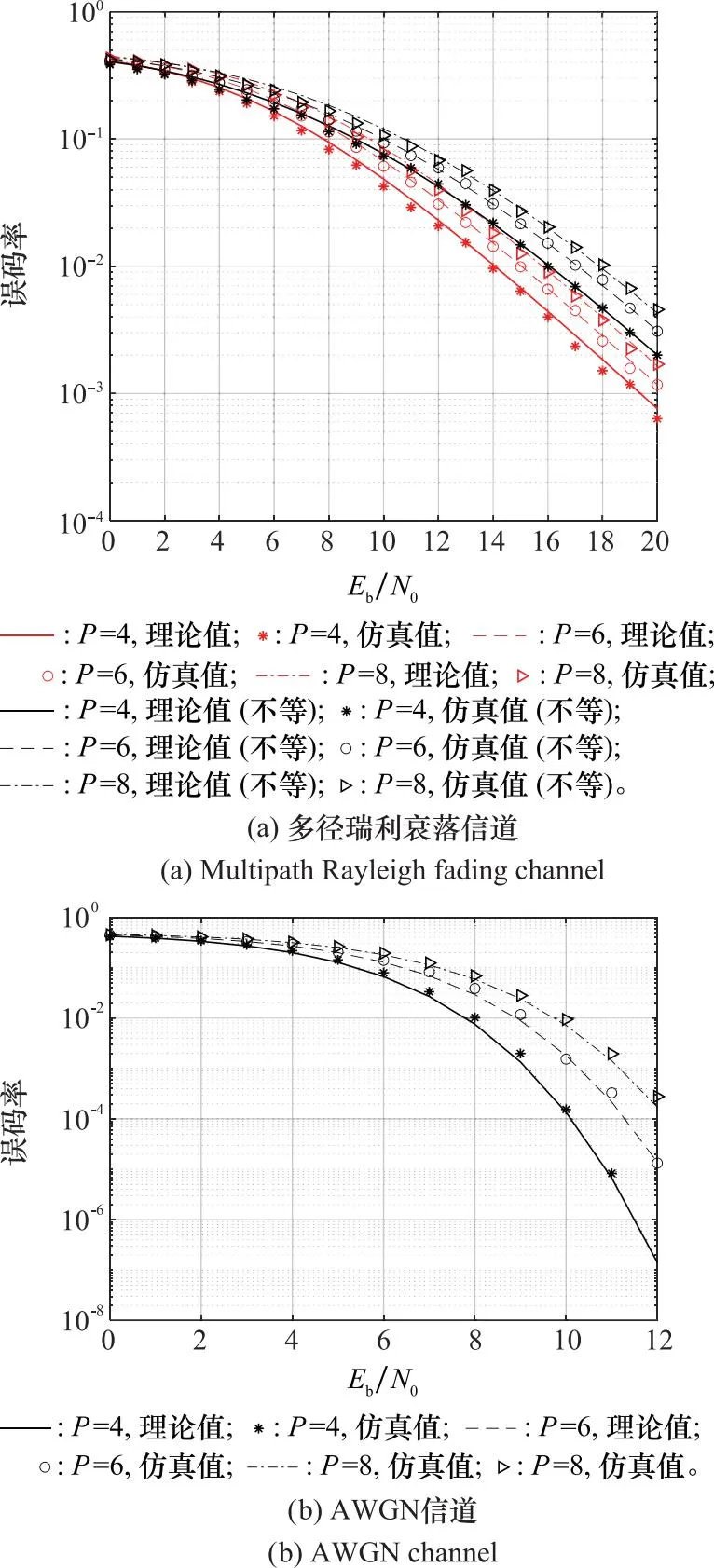
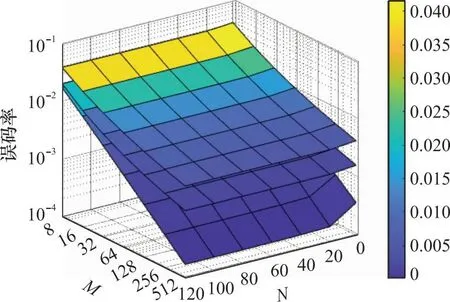
图1所示为HR-PIDCSK系统第2n+1和第2n+2个用户发送端的框图。在本系统中,m+1表示每符号持续时间所传输的比特数,M=2m+1表示进制数,比特流在发送端发送m+1比特,其中m个映射比特被用来选择一个预定义的置换矩阵,而一个调制比特被置换信号传输并表示调制符号。除此之外,在发射端处,混沌发生器采用二阶Logistics映射[16]产生长度为R的混沌样本作为参考信号,其中第k帧混沌信号为xi,k=[x1,k,x2,k,…,xR,k]T,0 图1 HR-PIDCSK系统发送端Fig.1 Transmitter of HR-PIDCSK system 每个进制数对应一个置换矩阵[20-21]Cn: Cn=R,n=1,2,…,2m (1) 每个置换矩阵由随机的β阶正交矩阵Rβ×β乘若干次移位矩阵Sh得到,移位矩阵为β阶矩阵,如下所示: (2) 正交矩阵乘n次移位矩阵也就等价于全部列向量向右平移n次。以单位矩阵为例,当m=2时,存在4个置换矩阵,可假设每个矩阵对应分别乘1,2,3,4次移位矩阵。 x(xTCi)T≈0 (3) (xTCi)(xTCj)T≈0,i≠j,0 (4) 由置换矩阵的性质,可用其携带多进制信息。置换矩阵承载m位比特信息,再通过混沌序列xi,k调制一位比特,因此需要2m个置换矩阵就可传输m+1个比特信息。第k个符号周期内的信号di,k表达式如下所示: (5) 图2 HR-PIDCSK系统信号结构Fig.2 Signal structure of HR-PIDCSK system 系统接收端框图如图3所示。接收到从信道传来的数据后,接收端去掉CP然后进行快速傅里叶变换[27](fast Fourier transform, FFT)恢复出并行序列为Ri,k,为解调第2n+1个用户的信息,将Ri,k延迟后的信息序列分别与置换矩阵组中的2m个矩阵相乘,解调2n+2个用户的信息时,则是将延迟后的信息序列Ri-(nP+1)R,k进行希尔伯特变换,与矩阵组的矩阵相乘,之后再与接收到的信号进行相关,判决后得到信息比特。判决过程中,由于置换矩阵组中只有一个矩阵承载信息符号,而该矩阵与其他矩阵近似正交,因此相关后绝对值最大的矩阵索引值可映射符号信息值,该值的符号即为第m+1个比特判决。当解调第2n+1个和第2n+2用户的信息时,输出判决表达式Z2n+1和Z2n+2分别为 (6) 式中:Bj为随机正交矩阵进行j次移位得到的置换矩阵。 (7) (8) 图3 HR-PIDCSK系统接收端Fig.3 Receiver of HR-PIDCSK system 在一个符号持续时间内,系统发送了2N(m+1)比特。因此,HR-PIDCSK系统的比特能量表示为 (9) 能量效率为一个符号持续时间内传输信息比特的能量与总能量的比值[28],其表达式为 (10) 表1比较了不同系统间的能量效率。由表1可知,HR-PIDCSK系统的能量效率与进制数M、用户数N以及复制次数P相关,当N和M相同时,该系统能量效率均大于PIDCSK系统和DPIDCSK系统,且当P越大,能量效率越大。 表1 系统能量效率比较Table 1 Comparison of system energy efficiency (11) 本节将分析系统在多径瑞利衰落信道和AWGN信道中的误码性能,多径瑞利衰落信道模型如图4所示。 图4 多径瑞利衰落信道模型Fig.4 Multipath Rayleigh fading channel model 图4中,di,k为加入信道前系统发送端的输出,αl(l=1,2,…,L)为信道系数,τl为路径延迟,ni,k是高斯白噪声,其均值为0,方差为N0/2。Ri,k为经过图4所示信道后的信号,其表达式为 (12) 由图4可知,第k帧中两个用户解调方式相同,接下来将以第2n+1个用户为例对系统性能进行分析。其判决变量表达式为 (13) 该系统在一个码片时间内可传输2N个用户的数据,每个用户传输log2M=m+1位比特,其中m位为索引比特,1位为调制比特。本系统误码率Pber由索引误码率Pm和调制误码率Pm+1组成,可以表示为 (14) 由误码概率和误符号概率之间的关系可知,索引误码率Pm与索引位数m和错误索引检测概率Ps相关,表达式为 (15) 调制比特出错有两种情况,一种是置换索引解调出错,这时正确检测概率为1/2,另一种是索引比特正确解调,但解调调制位时出现错误,此时调制误码率与传统DCSK误码率相同。因此,调制比特误码率Pm+1与错误索引概率Ps和传统DCSK误码率Pd相同,表达式为 Pm+1=Pd(1-Ps)+0.5Ps (16) 将式(15)、式(16)代入式(14)中,可得到系统误码率为 (17) 在本系统中,由于两个符号信息在同一个频率中传输,可能会出现选择同一个置换矩阵的情况。因此,接下来将对两种情况分别进行考虑。 (18) 式中:Bj为第j个置换矩阵。假设最大路径时延远小于参考信号持续时间,即0<τmax≪RTc,此时可以忽略符号间干扰。式(18)的均值和方差可近似为 (20) (21) (22) (23) [exp(-(y-u1)2)+exp(-(y+u1)2)]dy (24) 式中: (25) (26) 当索引比特正确解调,但解调调制位时出现错误时误码率表示为 (27) (28) 将式(24)、式(27)代入式(28),就可以得到第1种模式的总误码率。 (29) 式(29)的均值和方差分别表示为 (31) (32) (33) [exp(-(y-u2)2)+exp(-(y+u2)2)]dy (34) 式中: (35) (36) 当索引比特正确解调,但解调调制位时出现错误时误码率表示为 (37) (38) 将式(34)、式(37)代入式(38)中,即可得到第2种模式的总误码率。 假设每个用户的数据比特都是等概传输的,因此系统的总误码率为 (39) (40) 最后,系统在多径瑞利衰落信道下的平均误码率为 (41) 需要注意的是,当L=1,α1=1时,式(41)也为系统在AWGN信道下的平均误码率。 图5分别为多径瑞利衰落信道和AWGN信道中不同信噪比情况下混沌序列长度R对系统误码率的影响。可以看出,无论是瑞利信道还是AWGN信道,理论值和仿真值都非常吻合,可以证明第3节理论分析的正确性。当R较小时,理论值和仿真值结果吻合程度较差,这是由于GA法的局限性,只有R较大时,判决变量的分布才满足高斯分布。当N=64,M=8,P=4时,信噪比越大,误码率越低,抗噪声性能越好,R越大时,误码率越高,这是由于R越大时,引入的噪声越多。 图5 不同信噪比时R对误码率的影响Fig.5 Effect of R on bit error rate at different signal to noise ratios 图6为N=64,M=8,R=128时,分别在多径瑞利衰落信道和AWGN信道中不同复制次数P情况下信噪比和系统误码率的关系。信噪比越大时,误码率越低,这也证实了图5中的结论。P越大时,误码率越高,抗噪声性能越差,这是由于信号复制次数增多,信号与噪声间的干扰也就越多。在多径瑞利衰落信道中,信道增益相等的情况下的误码率低于信道增益不等的情况,抗噪声性能更优越。 图6 不同P时信噪比对系统误码率的影响Fig.6 Effect of signal to noise ratios on system bit error rate at different P 图7从上到下依次为不同增益的瑞利衰落信道、相同增益的瑞利信道以及AWGN信道条件下M和用户数N对误码率影响的三维图。由图7可以看出,无论在哪种条件下,随着M的增大,误码率都降低,这是由于当M增大时,系统传输比特能量降低,因此实现某个误码率性能所需Eb/N0也降低了。当用户数N增加时,系统误码率降低,但随着N的增大,误码率变化逐渐平稳。这是由于当N逐渐变大时,系统传输比特能量变大,但大到某一程度时,该值趋于定值。 图7 M和N对系统误码率影响的三维图Fig.7 Three-dimensional plot of the effect of M and Non the bit error rate of the system 图8为多径瑞利衰落信道和AWGN信道下不同系统信噪比和系统误码率的关系,其中设置参数为N=64,P=2,M=8。由图8可以看出,提出的HR-PIDCSK系统的误码率比PIDCSK系统和DPIDCSK系统都低,抗噪声性能最好。 图8 不同系统误码率比较Fig.8 Bit error rate comparison of different systems 本文提出了一种多用户高效PIDCSK系统,并对其误码率公式进行了推导和验证。该系统通过置换矩阵来承载多进制信息,再采用希尔伯特变换和OFDM传输多用户信息,从而在增强系统安全性的同时,提高了数据传输效率;同时推导了多用户高效PIDCSK系统的误码率公式后,通过蒙特卡罗仿真对其进行验证,并讨论了系统不同参数的影响;最后将本系统与其他几个系统进行比较,证明了提出的系统传输效率和抗噪声性能都得到了显著提高,在实际应用中具有更好的前景。由于提升传输速率是以提高了系统复杂度为代价,下一步需考虑如何在保证现有优势的前提下降低复杂度。

1.2 HR-PIDCSK接收端

2 效率及保密性分析
2.1 能量效率分析
2.2 数据传输效率分析

2.3 安全性分析

3 性能分析

3.1 发生选择碰撞情况下的误码率


3.2 不发生选择碰撞情况下的误码率

3.3 系统误码率

4 仿真结果



5 结束语
猜你喜欢
雷达与对抗(2022年1期)2022-03-31海峡姐妹(2017年10期)2017-12-19三联生活周刊(2017年33期)2017-08-11银行家(2017年1期)2017-02-15汽车零部件(2015年4期)2015-12-22家教世界·创新阅读(2015年8期)2015-07-21物探化探计算技术(2015年2期)2015-02-28单片机与嵌入式系统应用(2014年7期)2014-03-24铁路通信信号工程技术(2014年3期)2014-02-28山西大同大学学报(自然科学版)(2014年5期)2014-01-23