配网线路卡线器动力学建模与分析
2024-03-11 23:05郑哲张翔李雁龙翔郑源
机电信息 2024年3期
郑哲 张翔 李雁 龙翔 郑源

摘 要:针对配网改造工程施工中紧线慢、卡线器运动受阻等问题,分析了卡线器的运动性能,提出了提高卡线器运动平稳性的方法。基于Adams软件建立卡线器虚拟样机模型,通过在拉环和定夹板的关节连接处添加驱动对卡线器受力运动进行仿真分析,分别得到了卡线器主要构件位移、速度和加速度曲线,并深入研究了卡线器主要构件在张开和夹紧过程中动能和动量的变化曲线,得到拉环和卡线器主体之间平移副传递力和旋转副传递扭矩的变化曲线,提出平移副传递的力与旋转副传递的扭矩对夹紧力的影响。最后得到夹线过程中应力和应变分布云图,给出了整体响应和变形特点。
关键词:卡线器;配网;运动学;动力学;仿真
中图分类号:TP391.9 文献标志码:A 文章编号:1671-0797(2024)03-0078-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.03.020
0 引言
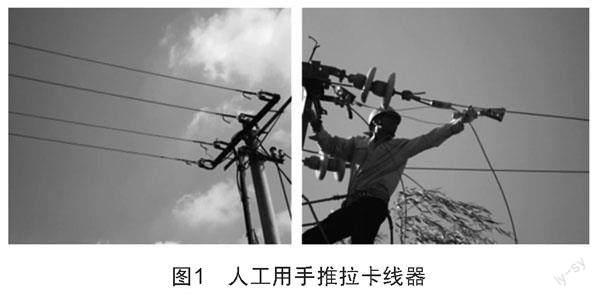
近年来,随着配网改造、完善工程量的不断加大,工程施工中紧线工作越来越多。在以往的紧线工作中,紧线需要施工人员手工进行推拉,既费时又费力,而且影响施工进度,所以,紧线慢的问题亟待解决。图1所示为采用传统方式人工用手推拉卡线器。
为解决紧线慢的问题,文献[1-2]提出了设计紧线辅助工具,将夹线口的位置移动得更远,使用棘轮紧线器对电线紧线操作时,就可以一次完成紧线的操作,而不需要像传统方式那样重复多次实现紧线,从而提高了工作效率。但紧线辅助工具在实际使用过程中时常发生卡线器运动受阻的现象,为此本文进一步研究了配网线路卡线器动力学特性。
1 配网线路卡线器结构分析与建模
如图2所示,配网线路卡线器由拉杆、定压板、动压板、上夹板、下夹板和卡线器主体组成。在卡线器使用过程中,拉杆在卡线器主体一侧的卡槽中运动,带动定压板转动,定压板与动压板、动压板与上夹板由螺栓连接,上夹板可以在卡线器主体的卡槽中运动。基于卡线器的结构,上下夹板的夹紧和张开可以通过控制拉杆的位置来实现。
在SolidWords里使用SolidWords Motion插件验证模型正确性、各部分是否干涉以及约束合理性,避免冗余约束,完成后保存为ADM文件。在Adams/View中打开ADM文件,添加模型的材料密度、需要的各种约束、接触摩擦、运动副和驱动。仿真时间为10 s,前5 s是卡线器上下夹板的张开过程,后5 s则为卡线器上下夹板的夹紧过程。
2 配网线路卡线器力学分析
2.1 配网线路卡线器运动学仿真
结构的动力学分析常用于结构设计中,文献[3]利用Adams设计了液压支架刚柔耦合模型,对其运动过程进行仿真分析,验证液压支架的可靠性与稳定性;文献[4]则对飞机前起落架收放机构进行了仿真分析。在上述文献研究方法的基础上,本文对卡线器进行运动分析。
图3为卡线器主要构件在Y与Z方向的位移曲线,拉杆只能在Z方向运动,定压板、动压板和上夹板可以在Y与Z两个方向运动。各构件Z方向位移曲线形状基本相同,因为零件倾角不同,具体数值存在差异。
图4为卡线器主要构件在Y与Z两个方向的速度曲线,在张开过程中各零件在Y方向速度先增大到4 mm/s,之后减少到0 mm/s,在Z方向速度由0 mm/s增加到最大值,之后減小到0 mm/s。夹紧过程的速度曲线与张开过程是对称的。
图5为卡线器主要构件在Y与Z两个方向的加速度曲线,卡线器张开过程中各零件Y方向加速度由最大值4.5 mm/s2慢慢减小,在2 s减小到0 mm/s2,2—5 s加速度反向增加,5 s时加速度达到-2 mm/s2。卡线器夹紧过程与张开过程对称。卡线器张开过程中各零件Z方向加速度曲线是线性的,由-12 mm/s2增加到12 mm/s2。卡线器夹紧过程与张开过程对称。
图6为卡线器主要构件在张开和夹紧过程中动能的变化曲线,各零件的动能数值大小符合一般认知,大小从拉杆、定压板、动压板到上夹板逐渐减小。
图7为卡线器主要构件在张开和夹紧过程中动量变化曲线,卡线器张开和夹紧过程中,初始状态各零件具有零动量,随着施加力的作用,零件的动量会逐渐增加,直到达到某个最大值,然后,当施加的力减小时停止作用,零件的动量会逐渐减小,最终趋于零,表示停止运动。
图8为卡线器主要构件势能增量曲线,拉杆只在Z方向运动,势能无变化,动压板、定压板和上夹板都在Y方向有高度变化,且上夹板高度变化最大,动压板次之,定压板最小。
2.2 配网线路卡线器动力学仿真
图9为拉环和卡线器主体之间平移副传递力的曲线,平移副的作用是将拉环施加的力沿着平移方向传递到卡线器主体上,从而实现夹紧或松开导线的目的。已知拉环和卡线器主体之间平移副传递的力大小约为5.2 N,这个力的大小可能会影响卡线器的夹紧能力,因为夹紧力与平移副传递的力有关。
具体地说,如果平移副传递的力足够大,可以压缩卡线器主体内部的夹紧弹簧,从而增加夹紧力,使夹紧口更紧密地夹住导线。反之,如果平移副传递的力不足,夹紧力则会减小,导致夹紧口无法夹住导线。因此,控制平移副的力大小可以调节卡线器的夹紧程度,以适应不同尺寸和类型的导线。同时夹紧力还受到多种因素的影响,例如夹紧弹簧的初始张力、夹紧口的形状和摩擦系数等,因此,在进行具体的应用时,需要进行系统的设计和参数优化,以达到最佳的夹紧效果。
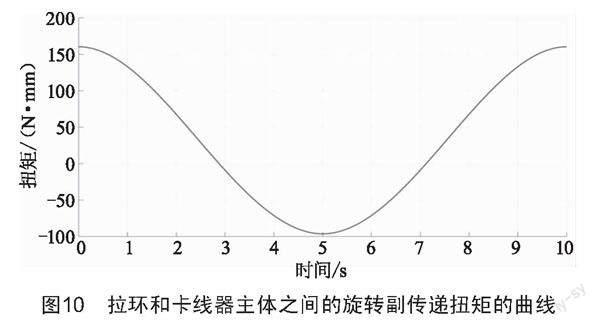
图10为拉环和卡线器主体之间的旋转副传递扭矩的曲线,根据扭矩曲线,在0 s和10 s时刻达到峰值,表示系统在这些时刻受到的扭矩最大。这可能会对卡线器产生较大的负荷和应力,需要确保卡线器具有足够的强度和耐久性来承受这些力矩。
在2.8 s和7.2 s时,扭矩曲线发生方向反转。这意味着在这一时刻,卡线器可能需要应对扭矩的突变,由正向扭矩转变为负向扭矩,或者反之。这种突变可能对卡线器的稳定性和工作效果产生影响,需要设计适当的机械结构来应对这种变化。
扭矩曲线的特性对卡线器的工作有以下重要影响:首先,卡线器的设计需要满足足够的强度要求,以承受最大扭矩。其次,在扭矩曲线发生反转的时刻,卡线器需要保持稳定,避免振动或失效,因此稳定性要求也十分关键。最后,考虑到扭矩曲线在不同时间点的变化,卡线器需要具备快速响应的能力,以适应突变的扭矩。因此,这些特性的综合影响会直接影响到卡线器的性能和工作效果。
2.3 配网线路卡线器有限元分析
文献[5]利用ANSYS软件对减重助行机器人进行结构强度分析,文献[6]利用ANSYS软件分析了门式起重机在多工况条件下整体结构的变形和应力分布情况。在上述文献研究方法的基础上,本文对卡线器进行了强度分析。
图11和12分别为卡线器在夹线过程中的应力和变形分布云图,图中最大等效应力集中在卡线器主体和下夹板一侧,说明这两部分在使用过程中容易出现问题。根据卡线器受力过程中的总变形图,可以看出在卡线器工作过程中,卡线器主体变形程度较大。
应对措施如下:首先,选择具有足够强度和刚度的材料以承受应力;其次,通过结构优化增加刚性和稳定性,如增加横向加强筋;第三,可以考虑在主体中添加加固结构或加强件;第四,优化工作过程,控制受力范围,避免超过设计范围。
3 结论
1)卡线器在整个运动过程中,Y方向位移曲线先增大再减小,位移最大者是上夹板,Z方向位移曲线先减小后增大,位移最大者是拉杆;Y方向的速度曲线和Z方向的速度曲线在张开和夹紧过程中均是先增大再减小;卡线器张开过程中Y方向加速度变化最大的是定压板,各零件Z方向加速度曲线是线性的,变化最大的是拉杆。卡线器夹紧过程与张开过程运行曲线对称。2)卡线器在张开过程中,平移副传递的力是先增大再减小的,旋转副传递的扭矩先减小再增大,卡线器夹紧过程和张开过程受力曲线是对称的;整体运动过程中卡线器受力呈波浪式,变化过程中无骤变凸起,符合无冲击工程要求。3)根据卡线器的应力分布云图和应变分布云图可知,在运动过程中,应力主要集中在卡线器的主体部分,最大变形位置为主体部分的卡槽头部;在卡线器工作过程中,卡线器主体变形程度较大,可以通过选择具有足够强度和刚度的材料以承受应力。
[参考文献]
[1] 孙磊,夏昊,孙晓伟,等.一种配农网线路紧线辅助工具:CN218586757U[P].2023-03-07.
[2] 沈铭福,龙威,高营,等.一种配网线路紧线辅助工具:CN114284944A[P].2022-04-05.
[3] 彭婧,李旭涛,李胜利.基于ADAMS的液压支架运动学仿真分析[J].煤炭技术,2023,42(8):237-239.
[4] 侯鑫新,王巍然,姚贺龙,等.基于ADAMS的某型飞机起落架收放机构仿真研究[J].科学技术创新,2023(20):31-34.
[5] 孙雅,张军,许靖宜,等.基于ANSYS的减重助行机器人结构分析[J].河南工程学院学报(自然科学版),2023,35(3):53-57.
[6] 许志敏,黄志强,阙华长.基于ANSYS的门式起重机结构有限元分析[J].机械研究与应用,2023,36(2):12-15.
收稿日期:2023-10-20
作者簡介:郑哲(1990—),男,浙江瑞安人,工程师,从事综合安全及应急管理工作。
猜你喜欢
发电技术(2021年1期)2021-03-16
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科学与财富(2016年28期)2016-10-14
海军航空大学学报(2015年1期)2015-11-11
机械制造与自动化(2014年1期)2014-03-01