基于通信载荷声纹特征的身份认证方法
2024-03-14 03:42赵德鑫陈迎亮
水下无人系统学报 2024年1期
陈 露 ,赵德鑫 ,王 俊 ,高 虹 ,陈迎亮
(1.国防科技创新研究院 前沿交叉技术研究中心,北京,100071;2.中国船舶集团有限公司 第705 研究所,陕西 西安,710077)
0 引言
受水下环境物理特性的限制,水声通信是水下最主要的通信方式之一,水下通信常通过水声通信网络来交换信息[1]。随着海洋环境日渐复杂,在组网通信时,面临着多通道通信[2]以及外界干扰,甚至存在恶意干预等情况[3],严重影响集群信息共享的质量和协同作业的效率,因此,如何构建安全的水声通信网络是水下通信面临的重要挑战。基于此已经开展了多项研究: 羊秋玲等[4]将数据加密融入隐蔽通信技术中,构建了一种新的水声通信网络安全防御机制,以确保通信传输正确性;陈惠芳等[5]基于多项式的密钥协商算法实现了移动汇聚节点和固定传感节点的相互认证,保护了信息的安全;黄亮平[6]提出了面向基于簇的混合认证协议,通过组网认证、新节点加入认证和移动节点认证,构建多重认证,保证通信网络的安全。这些研究针对水声通信网络的安全问题,主要关注于认证协议和数据加密,尽管能有效地提高网络的安全性,但也加重了通信网络的负担,无法平衡水声通信网络的安全问题和效能问题。为此,文中聚焦通信载荷在硬件制造中产生的差异,基于声纹特征对通信目标进行身份认证。
利用通信机在硬件制造中产生的差异进行身份认证有诸多优势。首先,水声通信机作为水下通信的主要设备具有广泛适用性;其次,通信机在制造过程带来的差异是不可控的,且这些差异始终存在于通信信号的传递过程中,因此这类差异对通信信号的影响具有不可复制的特点,通过这类特点标识不同个体搭载的通信机,可以有效识别不同目标个体的身份;此外,传统身份认证方式通过编码等形式对通信节点进行认证,增大了集群间网络的负载。文中从通信设备的物理特性出发,利用声纹进行认证,无需增加网络负载,在保证通信网络安全的同时,避免占用集群通信网络的通道资源,实现高效、低能耗的身份认证。
声纹特征作为区分、跟踪通信设备的标识,在无线电通信、移动智能设备通信等其他领域已经得到一些成功应用。Nguyen 等[7]通过对发射的无线电信号进行特征分析,以此识别出不同的发射机;冀晓宇等[8]使用CPU 模块辐射的磁感应信号,识别出不同设备个体;Das 等[9]提出移动智能设备内部嵌入的声学板块存在制造差异,利用声信号中遗留的差异特征,结合机器学习算法,成功对不同设备个体进行识别;Bojinov 等[10]收集多个移动设备传感器的声学信号,利用幅度表征传感器指纹,结果能可靠识别传感器个体。上述研究中均考虑了在频域范围内,经设备对信号产生的畸变影响,基于通信载荷的换能原理认识到: 通信设备对信号的影响体现在频域和相位域2 个方面,因此选择融合上述2 个域的特征,全面表征设备对信号产生的影响。此外,与上述研究相比,水声通信受水声环境的噪声干扰,仅提取信号中的幅度谱及其倒谱特征,难以展现出水声信号的差异,考虑到水声通信信号的能量分布,可以在通信频段进行非线性频率尺度转换,以增强信号能量集中区域的表征,一定程度上有利于捕捉到信号的有用信息。综上所述,尝试在信号倒谱特征基础上融合相位谱特征,试图更好表征通信载荷的声纹。
文中介绍了一个声纹特征的身份认证系统,聚焦于通信载荷在硬件制造中产生的差异,论证了利用通信机的声纹特征进行身份认证的可行性,并提出了一种基于该声纹特征的认证方法,利用注意力机制融合了非线性倒谱和相位谱特征,最后开展了相关的湖试试验。经试验验证,上述身份认证的方法不仅能识别不同型号的通信机,对相同型号的通信机也能有效区分,表明利用通信载荷的声纹特征进行身份认证是可行的。
1 身份认证机制
1.1 水下通信组网
水下通信网络可分为目标与地面控制平台的通信,以及目标之间的通信。为保证通信安全,文中设计了一种基于声纹特征的身份认证方法,可在水下通信网络的中转节点接入身份认证系统,如图1 所示。

图1 水声通信网络身份认证系统结构Fig.1 Architecture of underwater acoustic communication network authentication system
当目标在向上或目标相互间通信时,通信节点首先对信号进行身份认证,以防止未知信号的干扰和攻击,接着对通过认证的信号进行身份标识。在后续通信过程中,每一通信信号将携带自身的身份标识进行通信交流。通过该身份认证系统,对每一个目标发送的通信信号进行标识,便于后续控制平台和目标间对通信信息的分析和利用,实现高效且低能耗的网络通信。
1.2 通信载荷声纹
水声通信机是水下目标进行声学通信的最主要设备,其通信系统构成如图2 所示。信源经过通信机内部的算法处理后,由发射换能器发出。在内部处理信号过程中,传感器或滤波算法对信源产生一定的衰减和混淆,同时通信机内部换能器的性能也会对信源产生影响,如表1 所示。信源在通信机内部的每一阶段都可能引入混淆伪影,导致后续信号中将留下关于通信机的特征,因此,最终的接收信号将具有基于通信设备物理特性的差异。
通信机内部换能器结构如图3 所示,具体来说,通信机内部换能器的发声原理[11]是: 换能材料(如图3 中压电陶瓷环及其弯曲圆盘)受交变电场或者磁场激励,产生伸缩应变。不同类型换能器对不同频率信号有不同的响应特性,同一信号经不同频响后,可能存在一定的区别。同一型号的不同换能器个体在制作过程中的磨损,也将影响换能器对激励产生的伸缩效果,即影响换能器的响应灵敏度,从而在信号中引入可变性。
即使采用同种软件、同种算法进行调制,不同的通信机也会因为制作过程中产生的微小变化导致其发射的信号存在差异,由于这些变化不可避免且不可控,致使信号存在的差异具有难以复制的特点。此外,这些差异能始终存在于通信信号中,一起在信道中传递,故可以通过识别通信机发射的通信信号来标识不同的通信机,从而识别不同目标个体的身份。
2 识别方法模型
文中提出一种基于自主水下航行器(autonomous undersea vehicle,AUV)通信载荷声纹特征的识别方法。该识别方法的流程如图4 所示,以AUV通信信号作为输入样本,以通信机设备个体的标签作为识别类别,该方法最终得到的分类结果是对测试样本进行预测的标签。在训练阶段,对样本进行预处理、倒谱特征提取和相位谱特征提取后,输入到注意力机制网络中进行特征融合,并将融合特征与标签一起输入到AlexNet 神经网络中进行训练,得到分类识别模型t;在测试阶段,输入未知标签的样本信号,经数据预处理、特征提取和融合后,输入到模型t中,得到预测的设备标签作为分类结果;最后用模型预测准确率作为效果评价方式,具体为

图4 基于AUV 声纹特征的识别方法流程图Fig.4 Flow chart of the recognition method based on AUV voiceprint features
式中:Aacc为准确率;Ccorr为正确识别的样本数;Eerr为错误判别的样本数。
2.1 预处理
经数据准备后,将样本信号输入预处理部分,对其先后进行峰值归一化和端点检测。为防止信号中高振幅被忽略,需进行峰值归一化,即
式中:x1(n)为原始样本信号;x3(n)为峰值归一化后的样本信号。
通过对样本信号的采样点进行幅度累加后求均值,用信号原幅度值减去幅度均值以去除样本信号的非零均值,并用信号原幅度值与最大幅度值相除得到0~1 之间的幅值范围,将幅值波动设置为同一水平。接着,通过设置最小静音长度0.01 s和静音阈值-35 dB 实现端点检测,去除幅值为0 的沉默片断,以减少水声环境噪声对系统识别的影响。
2.2 特征提取
2.2.1 非线性滤波尺度
考虑到水声环境下噪声作用,为更好地表征信号的精细结构,捕捉到硬件制造中产生的差异对信号带来的细微影响,通过非线性滤波尺度[12],将获取的特征进行尺度转换和映射。非线性滤波尺度思想:为了增强信号能量主要集中区域的表征,对能量集中区域进行密集分布滤波,对其他区域进行稀疏分布滤波。其具体的过程是: 先使用Fratio 比率如式(4)所示,对信号整个频带进行分析;再利用每一频率段的F-ratio 比率进行滤波器分布密度设计,即
式中:Fratios为第s频带上的F-ratio 比率;ui为第s频带上的平均向量;u为所有频带的平均向量。将得到的滤波器密度分布应用于提取到的幅度和相位特征,对其进行尺度转换。
2.2.2 倒谱和相位谱特征
基于不同换能器对通信信号产生的影响,分析了数据在时域、频域和相位域的差异。其中来自不同通信机发射的通信信号,在时频上表现为波形畸变和在信号段的能量衰减;在同一频率下,从谱图中的细节处可以看出不同通信信号的能量值在能量和相位上也存在差异。因此在预处理和傅里叶变换后,文中首先提取了能量倒谱和相位谱特征,具体过程如图5 所示。

图5 特征提取流程图Fig.5 Flow chart of feature extraction
通过计算频谱实部与虚部平方和的标准差,可得到幅度谱系数,计算能量后应用非线性滤波尺度进行转换,最后通过对数变换和离散余弦变化得到非线性倒谱特征,具体为
式中:an表示频谱的实部;bn表示频谱的虚部。
通过式(6) 计算得到信号的相位谱,并在相位谱特征基础上应用非线性滤波尺度得到非线性相位特征,其提取过程如图5 所示。幅度谱计算公式为
2.2.3 提取过程
为了增强数据处理能力,将预处理后的样本信号归一化到固定音频长度1 s,并对不足长度的音频用插值补零法进行补齐。基于通信信号的非平稳性,把信号分割为固定长度0.025 s 的帧,并将汉明窗[13]应用于每帧,最终得到平稳的短时量。
对于上述得到的每一帧短时量,需重复以下步骤提取特征: 首先对每帧计算离散傅里叶变换,通过公式计算得到幅度谱、相位谱和能量谱;然后应用非线性三角滤波器组,得到非线性相位特征和非线性能量谱特征;经对数运算和离散余弦变换,可将激励信号和信道响应的卷积信号转换为加性信号,并映射在倒谱域中得到非线性倒谱特征。
2.3 特征融合及分类
为了抑制多特征在表征信号时的冗余,将上述2 个特征输入融合迭代注意力机制(iterative attentional feature fusion,IAFF)的AlexNet 卷积神经网络[14]进行特征融合和分类。
IAFF[15]在注意力机制(attentional feature fusion,AFF)上新增了初始注意力模块,并引入多尺度通道注意力模块(multi-scale channel attention module,MSCAM)关注基于局部的本地特征域和基于全局的上下文特征域。目前IAFF 广泛应用于不同领域的特征融合问题。Sun 等[16]在IAFF 基础上设计网络,对空中物体进行检测,实现了较好的特征融合能力,显著提高了卷积网络的精度;Wang 等[17]利用IAFF 整合不同模态特征,并在CrossFuse 数据集上提练出优于其他方法的特征融合能力。
针对数据分布不一致问题,将传统卷积层中的局部响应归一化改换为批量归一化(batch normalization,BN),以减小数据偏移。网络层结构如图6所示,将倒谱和相位谱特征作为网络输入,经IAFF 模块进行特征融合后(见图7),输入5 个卷积层、1 个池化层和3 个全连接层进行训练,最终生成预测标签。
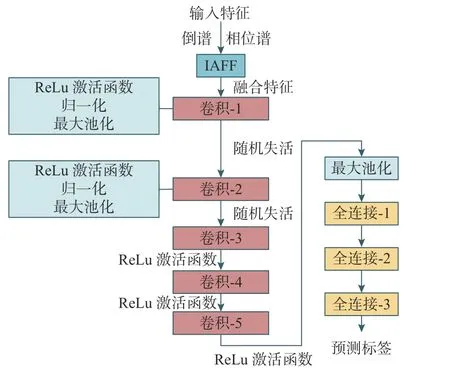
图6 神经网络结构图Fig.6 Structure of neural network

图7 特征融合Fig.7 Feature fusion
3 试验验证
在苏州湖域内开展了实地采集试验,由采集端实时采集目标水声通信机发射的通信信号。试验过程中,将水声通信机按设备编号为01、02、03、04 和05。01 水声通信机作为发送信号端,连接发送端电脑串口,05 水声通信机作为接收信号端,连接接收端电脑串口,在湖中指定点将两者放至水下指定深处。通过连接水听器、功率放大器以及录音笔或示波器构成采集线路,在指定点将水听器放至水下指定深处。完成线路连接和布放工作后,打开电源进行通电。通过控制发送端电脑发送信号指令,成功建立发射端与接收端的通信链路,此时水听器收集两者通信过程中发出的信号和环境数据。试验通过替换02、03 和04 通信机作为发送端,收集不同通信机个体发射的信号,以此提取不同通信机个体的声纹特征。
试验布局如图8 所示。其中,发射端通信机与接收端通信机相距L1=13.37 m,与水听器相距L2=5 m;发射端通信机、水听器以及接收端通信机均放置在水下深度D1=D2=D3=0.5 m 处。

图8 实验布局图Fig.8 Experimental layout
试验使用2 种不同型号的水声通信机,每种型号包含2 台水声通信机,共4 台设备。过程中每台设备发送多种18~28 kHz 频段的信号,使用水听器和录音棒采集信号。最终采集结果如表2 所示。
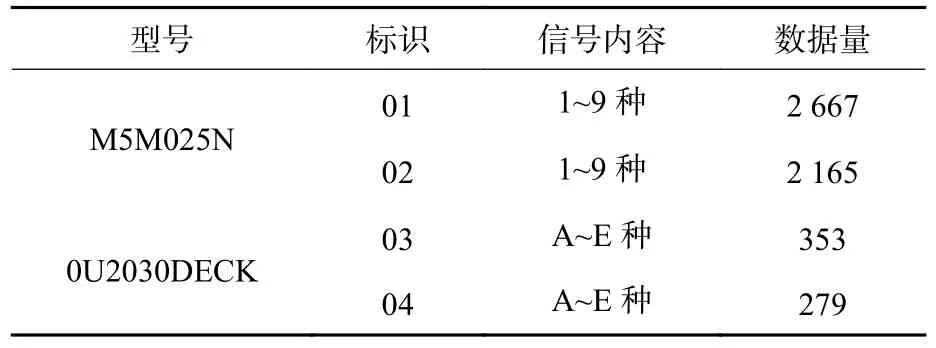
表2 信号采集表Table 2 Signal acquisition
将实验采集的通信信号按设备进行标记。根据不同的信号内容进行数据集划分(见表3)。利用划分好的数据集对上述识别方法进行验证,提取样本信号的非线性倒谱和相位谱特征,通过神经网络对训练集样本所提取的特征进行特征融合和分类模型训练,最后对测试集样本特征进行预测,得到识别准确率为98.15%,混淆矩阵见图9。
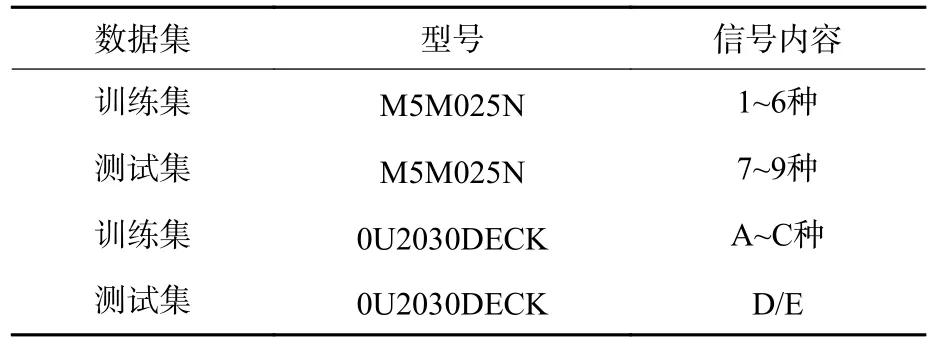
表3 数据集划分Table 3 Division of data set
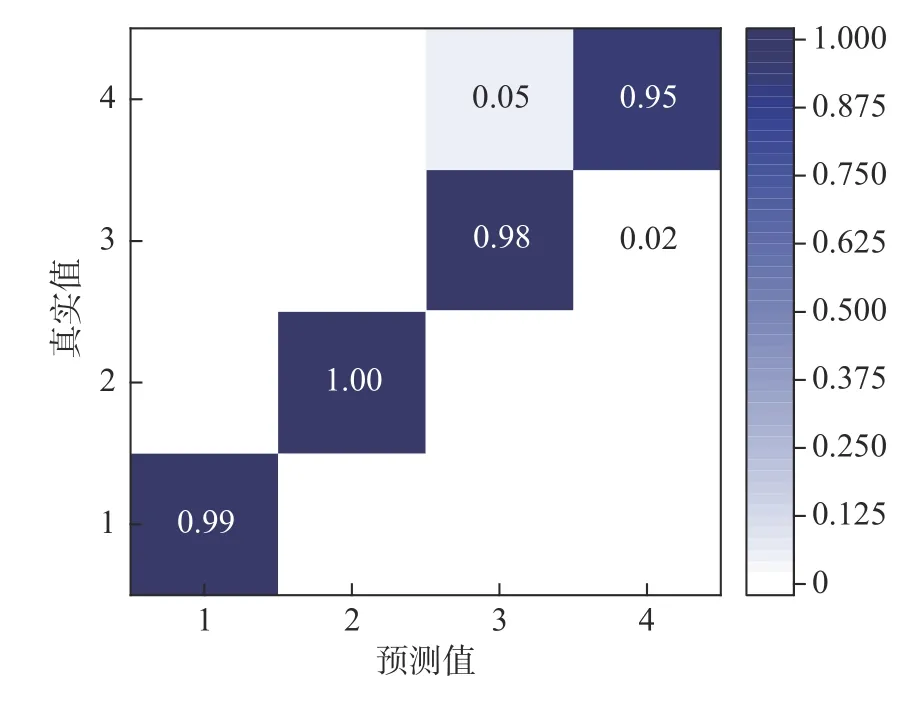
图9 混淆矩阵Fig.9 Confusion matrix
同一型号的2 台通信机之间在声纹特征上具有一定程度上的相似,导致识别结果在相同型号间存在些许的错误判断,但总体来看,不同型号的通信机以及同一型号不同个体的通信机均具有可区分的声纹特征,且该特征的差异与通信内容无关。因此,可以初步推断,利用水声通信机的声纹信息可以有效对AUV 进行身份认证。
此外,文中提取了无线通信等其他领域利用通信设备指纹进行安全认证的常用特征和线性滤波的倒谱特征,输入到AlexNet 神经网络中进行预测识别。表4 展示了不同特征及其组合用于识别的结果对比。结果表明,文中提出的非线性倒谱和相位谱的融合特征对身份认证方法的分类识别有一定的改善。

表4 不同特征下识别结果对比Table 4 Comparison of recognition results under different features
试验采集了不同深度、不同距离和发送端在不同运动状态下,01、02(同一型号的2 台通信机)的5~9 种通信信号。将采集到的随机环境信号标注后,作为验证集输入识别系统中,得到的识别结果如表5 所示。其中5~6 种信号在先验信息下,识别成功率均能达到80%以上;在通信信号内容不同情况下,模型识别效果受深度变化的影响最小,不同通信距离和运动状态下识别率均超过75%。识别结果表明,所训练的模型具有较优的鲁棒性,在不同信号内容、深度、通信距离和运动状态下,训练模型均可有效识别出发射端的通信机个体。这也表明文中所提利用通信载荷的声纹特征对水下通信网络进行目标身份认证的识别方法具有较好的可靠性。

表5 不同条件变量下识别结果对比Table 5 Comparison of recognition results under different condition variables
试验结果显示,AUV 声纹特征具有明显的可分性,对身份识别有积极的效果;此外,文中所提出的识别方法具有较好的可靠性,其识别性能并不局限于特定的条件和环境。综上所述,利用AUV声纹特征进行身份认证是可行的。
4 结束语
文中在现有身份认证方法基础上,引入了声纹认证技术。从通信设备的物理特性出发,提出了一种基于通信载荷声纹特征的身份认证方法,最后通过湖上试验,采集了2 种不同型号的水声通信机发出的多种信号。通过所提方法,利用非线性倒谱和相位谱的融合特征,不仅识别了不同型号的通信机,还有效识别了相同型号的不同通信机个体,验证了利用通信载荷的声纹特征进行水下目标的身份认证具有可行性和可靠性。该方法为解决水下通信网络的身份认证问题提供了新的思路,在维持高效且低能耗的通信网络运行的基础上,对实现水声通信网络的安全有一定参考价值,对保证通信网络信息共享的质量和协同作业的效率有积极的现实意义。
文中的试验仅涉及2 种不同的水声通信机,且每种通信机的数量较少。其次,在模型的评估方面,采取的不同条件变量都为单一变量,无法适应复杂的海洋环境。因此,未来将继续深入研究,针对多对象、多变量场景进行验证,同时在特征选择、融合和分类算法上进一步优化,以便更好地表征通信载荷的声纹信息。
猜你喜欢
通信产业报(2018年32期)2018-11-24
时代英语·高二(2017年4期)2017-08-11
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
公民与法治(2016年22期)2016-05-17
小猕猴智力画刊(2015年4期)2015-04-28
浙江大学学报(工学版)(2015年1期)2015-03-01
声学技术(2014年1期)2014-06-21
今日教育(2014年1期)2014-04-16