通过算法减少可变阻尼减震器中传感器的使用数量
2024-03-24 10:44徐忠义张伦维石杨斌
时代汽车 2024年2期
徐忠义 张伦维 石杨斌
摘 要:本文主要研究了通过软件计算来减少汽车可变阻尼减震器(CDC)的传感器数量的可行性。CDC可变阻尼减震器通常需要多个位移传感器和多个加速度传感器,同时会需要车载惯性测量单元(IMU)和车载自适应大灯高度信号进行分析处理。这里主要研究了两种方案:1、通过位移传感器和IMU的信号推算出加速度传感器的信号,从而取代加速度传感器;2、通过车身的6自由度IMU和大灯高度信号取消所有加速度和位移传感器。减少更多的传感器会着降低更多的成本,传递到市场就可以使更多的用户在在自己可以接受的价格区间享受更好的驾驶体验。然而减少更多的传感器很可能提高了产生更多的误差的概率。这篇文章通过MATLAB进行仿真、构建算法模型和采集实车信号从而评估减少传感器数量的可行性。
关键词:CDC减震器 传感器 控制算法 信号转换
1 引言
减震器是汽车底盘很重要的组成部分,影响汽车的垂向运动。普通的被动减震器由于阻尼力不可控制,很难兼容平衡汽车运动的舒适性和运动性。为了兼具运动性和舒适性,目前CDC半主动减震器可以实时改变减震器的阻尼来适应各种路况和个性化的驾驶习惯。几年前CDC可变阻尼控制减震器只会配置在中高端车型上。随着硬件的更新和成本的降低,这套系统逐渐应用于价格区间更低的车型,覆盖更广泛的用户。因此考虑节约生产成本是值得研究的事情。通过软件算法的弥补,用数量更少的传感器得到同样的信号,是可以根据车身结构通过姿态算法,微分积分等方法去计算的。然而实际情况每个传感器会存在误差和延迟。另外,在本身有误差的信号的基础上进行计算处理会产生更大的误差。本文会在CDC天棚算法的基础上探索如何通过算法计算取代传感器的方法,以及通过产生误差的大小来评估方案的可行性。首先,通过应用已有的位移传感器和IMU传来的信号,取代加速度传感器。进而研究应用一个车身6自由度的IMU去取代所有加速度传感器和位移传感器,这样会应用到更多的计算方法,包括卡尔曼滤波去提高计算精度。
2 方案
2.1 模型建立
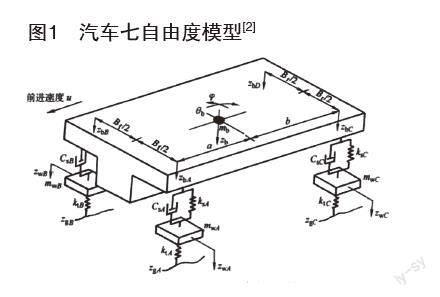
首先,建立汽车的物理结构模型,以此基础进行算法的研究。这个部分我们引用了一个7自由度的汽车模型,把汽车车身当成一个刚体,另外包括汽车垂向的弹簧和减震器自由体受力图。
如图1所示,假设车身为一块刚体,四角分别布置弹簧和减震器,A、B、C、D四点分别代表四个减震器系统所承受的震动来自车身垂向,俯仰侧倾这三自由度的影响。假设A,B,C,D 四处簧上配备加速度传感器和位移传感器,车体的上配备一个六自由度的IMU可输出车身的垂向加速度、俯仰角速度、侧倾角速度。无加速度的算法中主要通过位移传感器的二次求导,滤波和权重对比经计算过的IMU传来的加速度信号设计去计算加速度传感器的信号。无位移和加速度传感器算法需要更复杂的计算方法,包括振动,俯仰,侧倾导致的垂向的力分析。下边是在对减震器垂向分析所需要的公式用作对信号的处理与计算,并做出仿真结果分析。
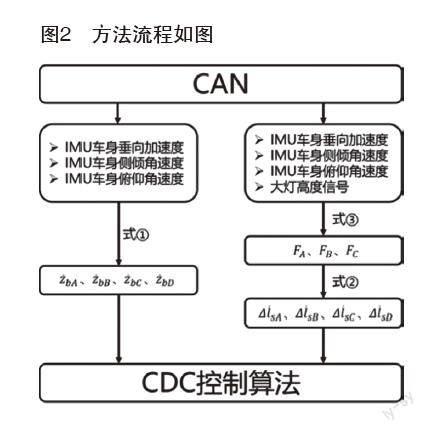
IMU可输出车身的垂向加速度、俯仰角速度、侧倾角速度,通过计算可分别计算出A、B、C、D四点垂向振动加速度函,因此可采用IMU信号替换加速度传感器。
車身垂向主要受四处减振器阻尼力和螺旋弹簧力的作用,车身受力可以由减震器受力和弹簧受力叠加组成。IMU传出的信号信息根据动力学运动方程式可以分别算出簧上的受力情况FA、FB、FC。再算出加速度信息。
上图2是无加速度和位移传感器方法通过从CAN里传出IMU和大灯高度信号去计算出原有配置的加速度和位移传感器提供的信息的方法流程图。用算出的信号信息去代替原有传感器的信息输入到CDC控制系统里。
2.2 无加速度传感器算法:
在实车上采集一段路程的数据,首先将这段路程的数据放在CDC的天棚控制算法里,一组输入为正常的位移传感器和加速度传感器的信号,另一组为只有位移信号输入,加速度信号通过位移传感器的信号和IMU发出的信号综合计算出。通过下面两组图可见两组数据几乎保持一致。
2.3 无加速度传感器算法:
应用相同的数据,对比加速度传感器的垂向加速度和用IMU算出的垂向加速度。下图红色部分是加速度传感器采到的信号经过滤波处理后的数据,黑色是用IMU得到的信号经过计算和滤波得到的垂向加速度的数据。通过对比两组数据非常接近,整个路段中是相同的走势。不过也存在着一些不同,例如IMU算出的数据存在一定的偏移。另外在遇到高频率振动的时候明显看出IMU算出的数据存在一些滞后性,当回到低频运动的时候,滞后有所降低。
图7上方两个信号的傅里叶变换图,从图中可以看出在低频时波形相同,当进入了高频IMU算出的信号波形明显减弱了一些。
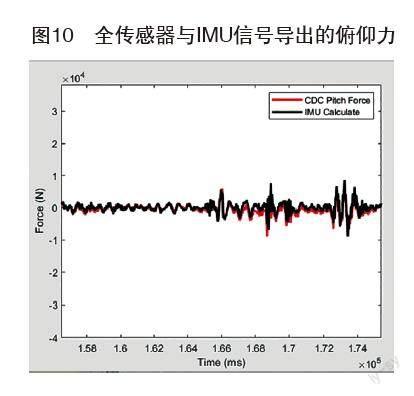
三幅图:图8,图9,图10分别是用原信号模拟出的垂向,侧倾,俯仰所产生的阻尼力之和和用IMU算出的力进行对比。在三幅图中可以看出IMU算出的阻尼力和真是的原信号算出的阻尼力基本趋势相同,但是也明显能看出一些误差。例如图8的垂向阻尼力,明显可以看出一些偏移,另外在高频的波动下误差会变得明显。
3 分析
从以上的仿真分析中,可以发现通过算法减掉四个加速度传感器,在天棚算法里仍然可以很好的适配,尽管会存在一定的误差,但是可以通过各种算法去进行优化和减小误差。但是此方法局限于天棚算法,如果需要为汽车匹配更多功能,例如加上更具有运动性的地棚算法,取代加速度传感器会有一定的影响。用IMU代替所有加速度和位移传感器的方法则会更容易出现偏差和响应延迟问题。通过实车采集数据进行仿真分析的结果表明,一些对比明显存在较大的误差,这些误差是在理论之外的。如果在实际中进行实车测试可能会产生更大的误差。在特定的车型里应用一些标定的方法和增加卡尔曼滤波的方法可以提高理想控制的精度,但同时也提升了算法的难度。总体而言,无论是减少加速度传感器还是去掉所有簧上的加速度和位移传感器,都是可行的,这点通过基本的天棚算法上可以证实。尽管会存在少量的误差、偏移和延迟,但后期可以通过标定和滤波设计进行优化。不过减少传感器数量的方法也限制了整体功能。
4 结论
随着传感器的发展,其精度及频率越来越高,目前在理论上,传感器已经可以通过软件算法取代。但是算法结果的精度误差和延迟无法避免,具体的延迟数据需要更多的实车检验。另外,在无加速度和位移传感器算法里IMU的位置布置和信号传递频率也会对结果产生很大的影响。同时,减震器阀门本身会存在一定的滞后性,软件算法层面上的滞后可能对实际效果影响不大。集中天棚算法可以达到一定的效果,大部分低价区间的车型主要以舒适性为主,五传感器的算法理论上可与提高汽车的舒适性。减少传感器在传感器信号失真的情况下确实会增加风险;多传感器的情况下,在某一传感器出现误差时,可以通过其他传感器在短时间内进行矫正。随着硬件的不断优化,传递频率提高,在未来IMU算法的精度会有很大的提升,这也会提高IMU算法代替其他传感器的可行性。
参考文献:
[1]余志生.汽车理论.第5版机械工业出版社2009.
[2]喻凡 . 汽车系统动力学.第2版机械工业出版社2017.
[3]Kicheol Jeong, Seibum B.Choi,. Vehicle Suspension Relative Velocity Estimation Using a Single 6-D IMU Sensor. IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY . 2019.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年9期)2018-08-04
电镀与环保(2018年2期)2018-04-19
制造技术与机床(2017年6期)2018-01-19
江西理工大学学报(2015年3期)2015-12-22
电源技术(2015年1期)2015-08-22
电源技术(2015年9期)2015-06-05