基于nCode的无人机金属机翼结构疲劳分析
2024-03-25 15:26徐咏梅乐文强
科技创新与应用 2024年8期
徐咏梅 乐文强


摘 要:近年来,无人机的发展受到越来越多的关注,其主要部件机翼结构的疲劳分析对无人机的安全飞行起到十分重要的影响。该文通过对无人机机翼结构建模,然后采用流固耦合的方法在ANSYS Workbench中模拟计算出机翼正常飞行状态下的结构应力应变分布和形变情况,并使用应力疲劳分析理论,将机翼强度运算结果结合材料S-N曲线在nCode疲劳分析软件中计算分析该无人机机翼的损伤和疲劳寿命。结果表明,该无人机机翼疲劳寿命的最小值和损伤的最大值都出现在主翼梁与机身连接的根部,为后续无人机机翼结构疲劳设计提供另一种参考方法。
关键词:无人机;机翼;有限元;疲劳寿命;损伤
中图分类号:V241 文獻标志码:A 文章编号:2095-2945(2024)08-0011-05
Abstract: The development of drones has attracted more and more attention in recent years, and fatigue analysis of the main components, the wings, has a significant impact on the safe flight of the unmanned aerial vehicle (UAV). This paper proposes a modeling approach to assess the stress, strain and deformation properties of unmanned aircraft wing structures. Then the structure was modeled by a fluid-structure coupling approach and analyzed in ANSYS Workbench under normal flight conditions. The stress fatigue analysis theory was applied to calculate the damage and fatigue life of the wing using the strength calculation results combined with the material S-N curve in nCode DesignLife software. The results showed that the minimum fatigue life and maximum damage occurred at the root of the main wing spar and the fuselage connection, which provided a new reference method for the fatigue design of the UAV wing structures.
Keywords: UAV; wing; finite element; fatigue life; damage
无人机是一种由动力驱动、机上无驾驶员、可重复使用的航空器,自诞生以来备受瞩目。无人机具有许多优势,包括成本低、性价比高、无人员伤亡风险、生存能力强、机动性能好和使用方便等,因此,无人机最早在军事领域得到应用,并且如今也越来越多地应用于民用领域,如航测、航拍、植保等。在军用和民用领域中,固定翼无人机是最常见的类型。其具有速度快、载重量大、航程远等优点,在战场侦察、目标识别和打击、航测、航拍、土地规划、边境巡逻和资源勘探等众多领域中承担着重要地位。然而,随着无人机的广泛使用,人们越来越关注无人机自身结构的安全问题。
众所周知,机翼是固定翼无人机整体结构的关键部件,在承受重力负荷、气动载荷、干扰载荷方面发挥着重要作用。机翼既产生升力以承受无人机自身的重力,还要在飞行过程中与周围大气相互作用,经受各种气动载荷和复杂的干扰载荷。这些载荷对机翼表面的压力分布和力矩产生影响,从而可影响无人机整体结构的可靠性。特别地,承受重力载荷的机翼在复杂的气动载荷和干扰载荷的作用下,容易发生疲劳破坏。疲劳破坏是由于长时间或重复加载下机翼材料出现应力集中、裂纹扩展和最终失效而引起的。机翼的疲劳破坏对无人机整体结构造成损害的同时也会对飞行安全构成威胁[1]。因此,无人机机翼必须满足结构强度和耐疲劳的要求,从而保证其安全有效地执行相应飞行任务。
本文将通过疲劳分析方法和有限元仿真的结合研究,求出无人机机翼巡航飞行时的应力应变情况,并进一步对机翼结构进行疲劳分析,对后续的无人机机翼结构设计有一定的指导意义。
1 结构疲劳分析理论
无人机机翼疲劳分析的关键是预测无人机机翼结构的疲劳寿命。疲劳寿命是材料或结构从投入使用直至破坏所受到的循环载荷的作用次数或时间[2]。结构的零、构件在变幅循环载荷下的疲劳寿命是由构成变幅载荷谱的不同载荷水平及其循环次数共同决定的。每种载荷水平,每循环一次都会给零、构件的疲劳寿命带来一定的影响。因此,要分析结构在变幅循环载荷下的疲劳寿命,就必须要定量评价不同载荷水平每循环一次对结构寿命的影响,这种影响在线性疲劳损伤累计理论中作为损伤的物理量来引入。
在最经典的Miner线性理论[3]中,某等幅循环应力的作用下,结构的疲劳寿命为N,那么受到该应力水平n次循环作用后,结构所受到的损伤D如式(1)所示
D=, (1)
式中:D为损伤;n为应力水平循环次数;N为疲劳寿命。
n的取值范围为0~N,值为0或N时,结构损伤值为0或1,说明结构没有受到损伤或结构已经完全发生疲劳破坏。
对于变幅载荷,如果结构在k个循环应力水平作用下,各经受ni次循环,则其受到的总损伤如式(2)所示
D=∑, (2)
式中:D为损伤;k为循环应力水平个数;ni为第i个应力水平的循环次数;Ni为第i个应力水平作用下的疲劳寿命。
并且当总损伤D=1时对应于结构已经完全损伤,疲劳破坏将发生。式(2)中与不同应力水平对应的寿命Ni,需要根据材料的S-N或者E-N曲线确定。
无人机机翼的疲劳分析问题通常比较复杂,在对整体结构的疲劳寿命与损伤分析之前,还要对机翼的应力应变情况进行分析。机翼结构的疲劳分析问题通常分为应力疲劳和应变疲劳2种类型,应力疲劳也称为高周疲劳,是一种经典的疲劳分析方法,基于材料的S-N曲线,其结构所受的循环应力水平低于材料的屈服强度,处于弹性形变范围内。应变疲劳也称为低周疲劳,以材料的E-N曲线为基础,结构所受的循环应力水平大于材料的屈服强度,以材料的塑形变形为主。随着数值计算和实验分析技术的不断提升,相关研究者也总结出了常用的结构疲劳分析方法[1]:名义应力法、局部应力应变法、应力场强法[4]等。在这些方法中,名义应力法适用于应力疲劳分析问题,局部应力应变法适用于应变疲劳分析问题[5]。
1.1 名义应力法
名义应力法是一种传统简单的疲劳分析方法,并在逐步发展的过程中还出现了应力严重系数法(SSF法)。首先,需要通过对无人机机翼结构的有限元分析来确定结构的疲劳危险部位,通常可以通过查阅相关手册来确定疲劳危险部位的应力集中系数,查取不到则可以采用有限元分析进行计算。再分析确定无人机机翼结构的载荷谱,载荷谱就是作用在结构上的载荷-时间历程。然后,根据结构载荷谱来计算得出机翼结构危险部位的名义应力谱,然后再结合与机翼危险部位相同的应力集中系数和应力水平下的材料S-N曲线,得到危险部位的S-N曲线,采用Miner线性疲劳损伤累积理论来求出无人机机翼危险疲劳部位的疲劳寿命。
无人机机翼结构里通常包含了连接部位,而SSF法是主要应用于结构连接部位而发展出来的疲劳寿命分析方法,实质是利用SSF值替代了应力集中系数,再使用连接件的S-N曲线来计算出连接部位的疲劳寿命,其关键就是求出连接部位的SSF值。
名义应力法的原理比较直观且容易掌握,因为其最早出现也累积了丰富的数据和经验。但预测疲劳裂纹形成寿命的名义应力法不稳定,需要花费大量的时间和经费来获得相应的材料S-N曲线,且精度较低,常用于筛选结构危险部位。
1.2 局部应力应变法
无人机机翼结构的疲劳破坏大多数情况下是出现在局部部位累积的疲劳损伤,这些局部部位在载荷的作用下不再是线弹性应力应变关系,而是产生了塑性应变,如果在疲劳寿命分析计算中考虑这些部位塑性应变的影响则需要使用局部应力应变法,其基本理论仍然是采用Miner线性疲劳损伤累积理论。局部应力应变法是通过对结构的应力分析得出局部危险部位的名义应力谱,再采用弹塑性有限元分析计算出局部应力应变谱,查取当前应力应变水平下的ε-N曲线和应用线性累计损伤理论最终计算分析结构的疲劳寿命[6]。
目前局部应力应变法已发展为一种精度较高的估算疲劳裂纹形成寿命的方法,试验工作量较小,同时直接应用危险部位的局部真实应力、应变,可以比较真实地反映结构的疲劳损伤状态,而且在工程上得到了广泛的应用。但仍有着不能考虑应力集中处的应力梯度和多轴应力的影响及对某些情况计算结果精度稳定性较差的缺陷。
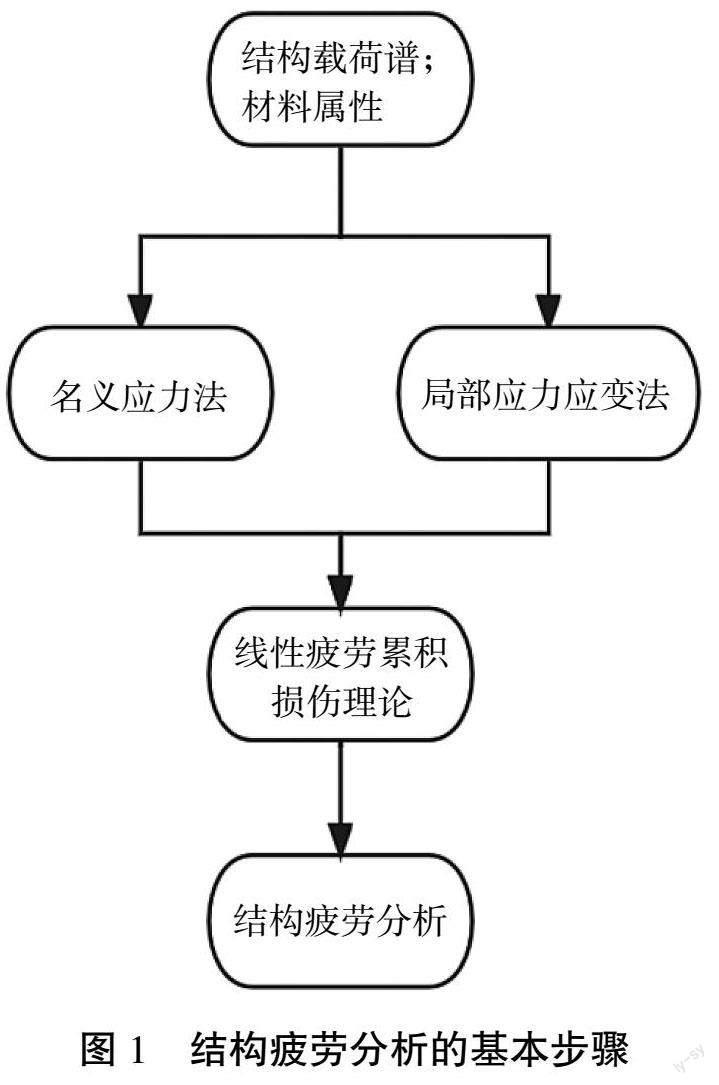
以上2种常用的结构疲劳分析方法都有各自的优缺点,在实际运用中可以根据不同的工程情况来使用对应的方法。总结下来,整个结构疲劳分析的步骤如图1所示。
2 无人机机翼结构疲劳分析
2.1 机翼有限元分析
本文采用典型无人机机翼的平面形状为矩形翼,翼型为NACA2414,翼弦200 mm,其机翼结构经过简化后由蒙皮、主副翼梁、翼肋等主要构件组成。由于无人机机翼关于机体纵轴对称,在巡航飞行的过程中受力也是对称分布,为了简化运算,取无人机的右翼结构运用CATIA软件建模后如图2所示。无人机机翼的翼梁主要承担机翼在各种载荷作用下的大部分弯矩和剪力,是机翼结构的主要承力件;翼肋主要确定了机翼剖面的气动外形,为展向翼梁和蒙皮提供稳定性支持;蒙皮用来构成机翼轮廓外形和承受局部空气动力。机翼材料均采用铝合金。
在无人机的巡航飞行过程中,其机翼承受的主要载荷分布为惯性力和气动载荷,而两者的作用方向相反,惯性力来源于机翼结构的自重。
本文利用ANSYS Workbench有限元计算,结合流固耦合的分析方法,先求解无人机机翼飞行中所受的气动载荷,然后再加载到机翼结构上,得到其受力强度分析[7]。流固耦合可以理解为固体和流体的共同求解,两者都不能忽略模拟问题。因为需要同时考虑流体和固体的结构特性,流固耦合可以有效节约分析时间和成本,同时保证结果更接近于物理现象本身的规律[8],所以近年来流固耦合分析在工程设计特别是仿真设计中的应用越来越广泛和深入。流固耦合可以分为单向和双向2种情况分析,本文中机翼结构飞行过程中对空气的影响较小,可以忽略不计,因此采用单向流固耦合分析。在Fluent流体分析软件中设置无人机机翼的飞行迎角为3°,马赫数为0.4,并采用Spalart-Allmaras湍流模型,该模型比较简单,常用于有壁面限制的流动问题,对飞机翼型的边界层计算有较为理想的计算效果[9]。
最终运算得出无人机机翼翼型的压力分布图,如图3所示,在无人机飞行过程中,气流接触到机翼前缘后被机翼分成2部分流動,因此前缘受到的气压值最大,气流流速在机翼上表面比下表面要快,故上表面压力值最小,上下压差形成无人机机翼的升力,该计算结果符合飞机绕流的基本规律。
在ANSYS Workbench结构强度有限元分析处理中,本文把无人机机翼的各部件之间的接触通过耦合约束来建立,并将机翼结构作为一个一端与机身固定连接,另一端自由的整体悬臂梁结构[10]。在无人机机翼结构上加载Fluent流体分析计算出来的气动载荷,最终求解得出机翼强度分析结果,其机翼结构等效应力的变化情况如图4所示,可以看出在机翼结构中,高应力主要集中在机翼蒙皮和主副翼梁,蒙皮越靠近翼根的位置,其所受的应力就越大;与机身连接的主翼梁的根部为整个机翼结构应力和应变最大值处,同时靠近机翼翼根并与翼梁连接的翼肋部位应力应变的大小也值得关注。从图4也可以看出,机翼结构所承受的最大等效应力小于铝合金材料的屈服强度,因此,可以把机翼的结构疲劳视为高周疲劳分析问题,采用基于材料S-N曲线的名义应力法来计算机翼结构的损伤和疲劳寿命。
(a) 机翼整体应力云图
(b) 机翼内部结构应力云图
2.2 机翼疲劳分析
根据前面相关的疲劳寿命分析理论,无人机机翼结构的疲劳分析需要用到对应的材料性能数据S-N曲线和疲劳载荷历程。nCode疲劳分析依托于ANSYS Workbench有限元分析,包括了众多的材料种类及丰富的材料性能数据。本文采用的无人机机翼材料为铝合金,由于轻质高强度的特点使其在航空航天领域中得到广泛使用。材料铝合金的弹性模量为71 GPa,泊松比为0.33。从ANSYS Workbench中查取Aluminum Alloy并获得相应的应力寿命S-N曲线。
载荷历程,也称载荷谱,对结构疲劳分析的影响较大,作为疲劳分析的重要因素,决定了结构疲劳寿命分析结果的准确度。nCode疲劳分析软件可以定义不同类型的载荷历程,分别为时间序列载荷谱、时间步长载荷谱、恒定幅值载荷谱等。本文无人机机翼采用静态疲劳分析,在nCode疲劳分析中导入之前运算得出的机翼结构强度分析结果,由于在常温环境下,载荷谱的波形对结构疲劳强度的影响很小,故使用正弦波形[11],创建恒幅正弦疲劳载荷谱。并采用Goodman理论来修正平均应力,该理论作出的疲劳分析偏保守,在工程设计中应用较广。
结合上述的材料S-N曲线和疲劳载荷谱,本文采用Minert线性累积损伤理论对机翼结构进行疲劳强度估算,在nCode中设定好各模块的参数后,提交运算可得机翼疲劳累积损伤云图和疲劳寿命云图,如图5、图6所示。
从疲劳损伤云图和疲劳寿命云图可以看出,本文无人机机翼结构越靠近翼根部位区域的疲劳损伤值就越大,其中损伤最大在主翼梁的根部,其原因应该是沿展向分布的大部分气动载荷集中在靠近机身的机翼部分,而机翼翼尖部分的气动载荷较小,机翼气动载荷沿翼展分布是不均匀的,这是由于无人机飞行时,机翼下表面的高压气流会绕过机翼翼尖而流向上翼面低压区,使翼尖部分上下表面的压强趋于平衡,升力趋于零。靠近翼尖附近的其他剖面显然也要受到不同程度的影响,离翼尖越远,影响越小。而机翼结构疲劳寿命的最小值出现在主翼梁与机身连接的根部,同时也是应力值最大处,其值为9.421×107次循环。
3 结束语
本文结合了有限元计算和疲劳分析理论,对无人机机翼有限元计算分析可以得出以下结论。
1)机翼是无人机在飞行过程中的关键承力部件,其结构的安全可靠性往往也决定了整个无人机的安全可靠性。根据无人机机翼的气动计算结果和机翼材料的属性参数,本文通过nCode疲劳分析软件对无人机机翼结构的疲劳损伤和疲劳寿命进行估算分析,可以得出应力最大的同时最为危险处是机翼主副翼梁的根部,以及靠近机身处的翼肋与翼梁的连接位置也值得让人关注,该无人机机翼疲劳损伤和疲劳寿命的值基本满足结构疲劳设计的要求,本文结合有限元分析和疲劳设计的方法,可以给无人机的疲劳设计提供新的思路和解决方法,进一步优化无人机的结构设计。
2)在实际工程应用中,无人机的疲劳载荷工况会更加复杂多变,因此,本文对无人机实际载荷谱的获取仍不够完善,如果要想得到更加准确的无人机机翼损伤和疲劳寿命,必须对无人机的飞行过程做出准确的模拟,例如突风载荷和发动机的振动载荷等,这样才能得到更加准确的载荷谱,使疲劳分析结论具有更高的可信度。这也是下一步的研究方向。
参考文献:
[1] 崔德刚,鲍蕊,张睿,等.飞机结构疲劳与结构完整性发展综述[J].航空学报,2021,42(5):71-92.
[2] 姚卫星.结构疲劳寿命分析[M].北京:科学出版社,2019.
[3] 陈传尧.疲劳与断裂[M].武汉:华中科技大学出版社,2002.
[4] 陈健,崔海涛,温卫东.基于应力场强法的缺口构件疲劳寿命预测方法研究[J].长春理工大学学报(自然科学版),2010,33(4):87-91.
[5] 王彦伟,罗继伟,叶军,等.基于有限元的疲劳分析方法及实践[J].机械设计与制造,2008(1):22-24.
[6] 邸洪亮,陈亮.高机动无人机机体结构疲劳寿命分析方法研究[J].航空科学技术,2022,33(6):41-45.
[7] 高清冉.农用无人机气流扰动翼疲劳有限元分析[J].农机化研究,2022,44(2):50-53.
[8] 刘基海,易阅城,谢科,等.单向及双向流固耦合方法在无人机翼的应用分析[J].应用科技,2022,49(4):70-78,91.
[9] 曾炳寿,蒋蓁.基于FLUENT的机翼损伤小型无人机气动分析[J].工业控制计算机,2014,27(5):94-96.
[10] 王龍,段静波,路平.无人机机翼悬臂梁结构损伤检测影响因素研究[J].电光与控制,2017,24(5):77-81.
[11] 姜年朝,谢勤伟,戴勇,等.基于ANSYS/FE-SAFE的无人机复合材料机翼疲劳分析[J].玻璃钢/复合材料,2009(6):3-4,11.
自动驾驶技术是未来道路交通的重要关键技术,车辆所在车道的识别是自动驾驶技术的一大基石。对于道路隐形指示标志的合理使用,可有效弥补现有道路显形标志标线存在的问题,提高交通标志的使用寿命,完善了智慧交通领域的基本组成。
1 交通标志的发展历程
交通标志起源于德国,距今已有80多年的历史。在早期西方工业社会,道路边线的设计和涂划相对简单,交通管理部门仅在道路上施划中心线及人行横道线。自西方工业社会经济危机结束至第二次世界大战全面爆发前,道路交通快速发展,这一时期的道路已有同向多车道,交通管理部门通过涂划道路交通标志起到分隔车道的作用,从而保障同方向行驶车辆安全。随后,标志由最初的单实线逐渐补充了虚线和双实线,标志的颜色也从单纯白色到现在的白、黄、红和蓝等颜色。
2 现有交通标志的缺陷
近年来,随着交通事业的蓬勃发展和对出行体验、道路运输效率的重视,人们对道路标志的要求逐渐提高,而伴随着自动驾驶及相关智能化产业的飞速发展,能否准确、快速地识别道路标志,并基于识别结果引导驾驶行为,日趋成为交通安全的重要前提。现有交通标志是基于可见光频谱内的人眼(摄像系统)识别的标志,即显形交通标志。当前道路车道识别技术依赖于路面标志线的识别,包括车道标志线、交通标志线等。目前,现行道路交通标志线,其性能是得到了充分验证的,也成为了道路交通的一大基本要素。但现有道路标志线难以克服以下几个问题。
2.1 气象环境影响
标志标线受雾气、雨水、冰雪、雾霾和沙尘等气象影响服役性能大幅下降。交通标志正常服役的基础是可识别性,在可见光视觉感知条件下,无论是驾驶员可识别还是人工智能可识别,都需要标志标线的完整、清晰和连续可视。而受恶劣气象环境影响,驾驶员和图像识别系统无法视觉观测到道路前方連续清晰的道路表面显形交通标志标线及视觉区域范围内的交通标志标线,这对于交通安全是一巨大隐患[1-3]。
2.2 复杂交通环境影响
主要受一定范围其他车辆遮蔽和阻挡的视觉感知,如城市道路中前方公交车对随后小型车的视觉遮挡,跨线车辆对后方摄像头和其他传感器的影响。在复杂车流环境下,高精度和低延迟就成为了首要的自动驾驶需求[4-6]。
2.3 标志线工作状态的影响
标志线的污损及材料老化导致交通标志线服役寿命不足。交通标志正常服役的另一大基础是连续性和服役期与有效寿命匹配。现有交通标志线在实际工作环境中,其寿命往往低于道路面层,需要反复涂划,既影响交通通行,又增加了道路养护费用,同时降低交通安全[7-8]。
因此,亟需一种不受交通载荷和路面环境影响且长寿命的新型道路标志。同时,随着基于各类传感器的计算机识别技术的高速发展,使得满足自动驾驶需求的新型标志及识别系统已成为可能。
3 道路隐形指示标志的创新设计
3.1 道路隐形指示标志的基本定义
道路隐形标志是一种埋设于道路上面层之下,可以被车辆感知的交通标志。相比于现有的涂划于道路表面的道路标志(显形道路标志),埋设在道路面层之下的交通标志不可被人眼感知或图像识别,因而命名为道路隐形标志。道路隐形标志的识别方式为传感器识别,传感器在完成识别后,可直接将电信号转化为数字信号并引导自动驾驶。现有道路标志采用的识别技术路线为:首先通过视觉或视觉仿生传感器获得路面标志的图像,通过驾驶员或图像处理手段获得图像信号,再将获得的图像信号转化为数字信号或电信号,进而对驾驶行为进行决策,最终表现为一般的驾驶行为;道路隐形标志则直接获得路面以下的信号,将其转化为电信号或数字信号,并传递给驾驶员或直接接入自动驾驶的数据库进行决策,最终也表现为一般的驾驶行为。道路隐形标志与显形标志的明显区别在于无须进行图像识别,从底层逻辑优化了道路标志的信号转化,提高了响应速度。
3.2 道路隐形指示标志的几何设计
为了确保道路隐形指示标志的基本定位能力,其几何特性是最重要的设计指标。图1展示了道路隐形指示标志设计过程中最基本的5个几何特征:标志的数量(N)、标志的长度(L)、标志的宽度(W)和同一组道路隐形标志块内部各标志的间距(D)和相邻组道路隐形标志块外部的标志间距(M)。通过与行驶速度和步进频率测试方法的耦合,可以完美匹配获取上述几何特性,这为后续精确定位提供了基础。在这种设计方案中,所有标志都设置在行车道的中间,其目的是确保所有类型的汽车都能识别这些信息。同时,几何设计的总宽度不宜过大,以便提高传感器与车辆耦合过程中的适配性。上述5个基本的几何特征可以满足对车道宽度、车辆位置和行驶速度的要求。同时,道路隐形标志检测系统对编码的基本要求是确保信息密度。如图1所示的道路隐形指示标志几何设计方法,其编码具体方式为存在性编码,即所在位置是否具有可识别的标志,具有可识别性则输出1,不具有可识别性则输出0,则在标志数量设计为8时即可形成一个八位二进制编码。利用八位二进制编码的不同组合形式可以有效进行车道导向和地理位置导向(表1)。
(a) 道路隐形指示标志设计的立面图
(b) 道路隐形指示标志设计的平面图
目前使用的道路交通标志的总数还比较少,这使得八位编码可以有效地表示现有的交通标志。通过道路隐形指示标志的设计和使用,将有效提高自动驾驶的驾驶行为决策的效率,从而提高复杂环境下的道路行车安全。
对比现有显形道路标线所存在的老化开裂、易磨损、雨夜反光性不足和振荡标线失能等安全隐患,道路隐形标志的一个显著特点是具有长寿命性。其布设原则是将道路隐形标志置于上层路面之下,该设计目标是保证道路隐形标志能够被检测到,同时又得益于上层路面的保护,有效地延长了道路隐形标志的使用寿命。从理论上讲,道路隐形标志的使用寿命和上面层的使用寿命基本相同。进而,道路隐形标志可以延长交通标志的使用寿命,避免现有显形道路存在的因标志性能下降而导致交通安全隐患的问题,进而提高道路交通安全和通行能力。
3.3 道路隐形指示标志的材料设计
道路隐形指示标志的具体涂划材料应当经过反复多次的材料试验决定。本文提出基于瞬变电磁法(TEM)测试时的材料关键属性。TEM测试感应电压V算法如下
V(t)=■, (1)
式中:k1为常数;I为发射电流;q为线圈面积;σ 为介质电导率;t 为时间。
而TEM测试过程中一次场的传播τ速度为
?子=2?仔 , (2)
式中:ρ为均质介质的电阻率;μ0为介质的磁导率,在空气中等于 4 π×107 h/m;t为瞬时场的扩散时间。
上述公式表明,检测的具体内容与被穿透层的电导率、电阻率和磁导率密切相关。现有的研究表明,沥青材料的介电常数[9]约为 2.8~3,而沥青混凝土材料的介电常数[10-12]为4.5~8。金属材料的介电常数与沥青混凝土的介电常数明显不同,因此可以产生一个明显的感应电场(二次场)。基本原理图如图2所示。
3.4 道路隐形指示标志的检测与识别
道路隐形标志的识别精度和速度是整体设计的关键点。现有技术表明,三维探地雷达(3D Ground-Penetrating Rader, 即3D GPR)在识别异介质层的形状和深度的能力是卓越的[13],这为道路隐形指示标志的探测提供了高可行性;同时,经过一系列的初步技术验证,电磁探测设备也具有探测金属介质或其他可以激发二次场介质材料几何特性的性能,电磁探测设备主要采用的探测方法包括瞬变电磁法(TEM)、平衡线圈法(Balanced Coil, BC)等。相比于探地雷达,电磁检测的方法更具有经济性,但其精度受地下介质的复杂程度、设备的灵敏度等因素的影响,因此,需要通过不断实验来优化提高电磁检测的精度以满足不同场景下的特定需求。两者的设计检测方法如图3所示。
三维探地雷达(3D GPR)的基本组成包括发射天线、接收天线和图像处理设备,其工作原理是:利用发射天线发射电磁波,由于不同层间的介电常数不同,其层与层之间会发生反射和折射,再通过接收天线接收这些返回的回波(A-扫描信号),并对回波进行数据处理后形成B-扫描图像,即完成了对不同目标的探测、识别和定位工作。其工作原理如图4所示。
(a) 三维步进探测方案
(b) 探测器具体排布方案
相比于普通的探地雷达(GPR)技术,三维探地雷达(3D GPR)具有下述更突出的优势。
1)雷达信号源输出的频率分量可以精确控制,而且每个频率分量的能量相等。
2)通过控制雷达主机的信号带宽,可以有效抑制噪声,从而提高灵敏度。
3)探地雷达信号是一种频域信号,可以方便地应用频域的信号处理方法进行数据分析,100 MHz~3 GHz,可由用户根据需求设定,同时兼顾探测深度和高分辨率的需要。
同时,在三维GPR方法中采用了阶梯式频率脉冲测试方法。阶梯式频率脉冲是指GPR的工作频率以阶梯式方式进行,GPR发出的信号从起始频率(f. start)到终止频率(f. stop),在一个扫描周期内的频率间隔Δf,而其工作带宽B和频率间隔Δf为
, (3)
式中:B为工作带宽;f. start为起始频率;f. stop为终止频率;Δf为频率间隔;N为步进频率次数。
同时,使用数字频率信号源代替传统的锁相循环,步进频率的三维探地雷达可以产生0.5~10 ms的扫描周期,包含1 500个从100 MHz~3 GHz不同频率的信号。由于步进频率的三维探地雷达是一个同相位接收器,保证了整个扫描周期的信号在毫秒内可以被完全利用。同时,步进频率扫描技术可以通过编程以控制测试性能,针对不同的测试目的,使用不同的频率范围来控制整个频谱。步进频率信号模型如图5所示,初始频率f0,步进频率为Δf,第n个时间段的频率为f0+(n-1)Δf。
与三维探地雷达技术相比,电磁探测技术采用不同磁通量对应于不同的电磁场的基本原理,其突出优势在于其成本低。瞬變电磁法(TEM)和平衡线圈法(BC)是电磁探测技术采用的2种主要探测方法,2种探测方法应用于道路隐形标志方面各有优劣势。
瞬变电磁法(TEM)也称时域电磁法(Time Domain Electromagnetic Method)。瞬变电磁法共使用2个线圈进行接收,一个为不接地的返回线圈,另一个为恢复线圈。不接地的回流线圈发射一个脉冲电场(主场)来激发被测物并产生一个二次场。恢复线圈接收二次场在发射脉冲之间的时间变化。通过分析接收到的二次场数据,可以确定异常电场的位置,从而发现该物体。瞬变电磁法工作示意图如图6所示。
平衡线圈法的工作原理如图 7 所示。发射线圈和接收线圈在自下而上的方向上相互平行排列。一对双胞胎接收线圈使用平衡差分连接到一个差分放大器电路。当没有金属时,发射线圈的磁场在双子接收线圈中感应出大小相等但方向相反的电动势。这导致感应电动势相互抵消,接收线圈的磁场处于平衡状态。当金属物体进入磁场范围时,电磁感应在金属内部产生感应电势,产生涡流,从而激发变化磁场。由于金属物体相对于2个接收线圈的位置不同,接收到的信号信息也有所不同。差分电路输出的电平信号反映了金属的大小和特性。2个接收线圈接收到的信号的振幅和相位根据金属物体的位置、大小、导电性和渗透性而变化。这种振幅和相位信息被用来探测和区分金属异物。与瞬变电磁法相比,平衡线圈法的探测深度较浅,但可用于大面积区域的快速探测。
4 道路隐形指示标志的应用与前景
4.1 检测预期结果
三维探地雷达技术通过对不同探测方法的原理和技术发展状况进行预估,将具有更高的预期结果或期望值。通过读取编码信息并将电信号转换为数字信号,这一结果可以直接写入自动驾驶的驾驶行为决策数据库中。同时,三维探地雷达技术的检测结果也将通过中央处理器传输到用户界面,以引导驾驶员的行为。
瞬變电磁法、平衡线圈法等方法通过探测上面层下部的异质材料,进而获得信号振幅以得到相对应的道路隐形标志。探测过程中将多个探测器以固定排列方式耦合,可以检测整个行车道范围内的信号振幅变化。通过将图8(a)所示的频率信号转换为图8(b)所示的电平信号,可以有效地获得关于标记存在的信息。车辆前进速度和探测周期的组合可以测试长度,结果如图8(c)和8(d)所示。瞬变电磁法和平衡线圈法可以有效地降低设备成本,同时为整个系统的简便化提供更为可靠的技术路线。
4.2 布设位置预期成果
道路隐形标志的结构设计采用了保护层设计的概念,如图9所示。上层路面设计为保护层,以保证现有道路标线和道路隐形标志同时存在。沥青混凝土路面上层的设计寿命不低于5 a,维护周期为2~3 a。道路隐形标志的设计是与上层路面同时更换。根据弹性层体系理论和基本假设,铺设在上层下面的道路隐形标志材料几乎不会被损坏,为其长寿命提供了理论依据。道路隐形标志系统整体设计模型示意图如图10所示。利用道路隐形标志几何布设对应的八位二进制编码进行车道和相关经纬度等地理位置的布设,通过现有GPS定位作为对应位置的确认以确保道路隐形标志布设位置的准确性。
4.3 综合应用前景
关于自动驾驶中的车辆定位的研究,各课题组都在快速展开并有效进行。既往研究表明,车辆的精确空间定位需要多个传感器之间的协作。本文描述的道路隐形标志为车辆定位提供了一种新形式的基础设施支持,其提供了超越现有标线系统的车道间的精确定位和交通规划潜力。道路隐形标志体现了一种新形式的预感设计,通过提前编写道路交通指令来规划前方路线,并通过连续检测为自动驾驶提供连续的交通信息。现有的标线系统受其视野的限制,不能有效地预测前方的情况,因此道路隐形标志更适合未来的发展。
参考文献:
[1] GIBBONS R, ANDERSEN C, HANKEY J. Wet night visibility of pavement markings[J].Transportation research record: journal of the transportation research board,2005,1911(1):113-122.
[2] THOMAS M W, CAROL S, VICTORIA S D, et al. Volcanic ash impacts on critical infrastructure[J]. Physics and chemistry of the earth,2012,45/465-23.
[3] WOLSHON B. Transportation's role in emergency evacuation and reentry[J]. Nchrp synthesis of highway practice, 2009.
[4] WANG C, LI Z, FU R, et al. Lane change safety assessment of coaches in naturalistic driving state[J].Safety science,2019(119):126-132.
[5] YUAN W, FU R, GUO Y S, et al. Drivers' lane changing intention identification based on visual characteristics[J], CHINA journal of highway and transport, 2013,26(4):132-138.
[6] SAINA R, ABDOLLAH H, ALI K, et al. Identification of Anomalies in Lane Change Behavior Using One-Class SVM[C]//2016 IEEE International Conference on Systems, Man, and Cybernetics: SMC 2016, Budapest, Hungary,9-12 December 2016,pages 4082-4877,[v.6].:Institute of Electrical and Electronics Engineers,2016:4405-4410.
[7] ABBOUD N, BOWMAN B. Cost- and longevity-based scheduling of paint and thermoplastic striping[J]. Transportation research record journal of the transportation research board, 2002(1794):55-62.
[8] MULL, D.. Paint Pavement Marking Performance Prediction Model That Includes the Impacts of Snow Removal Operations[R].
[9] LI Q S, HEI D P, ZHANG H. Research on dielectric characteristic of guss asphalt concrete[J].Highway Engineering,2015 40(5):134-140,106.
[10] AU P A, KOMACKA J. A comparison of dielectric constants of various asphalts calculated from time intervals and amplitudes[J].24th russian-polish-slovak seminar on theoretical foundation of civil engineering,2015(111):660-665.
[11] PIUZZI E, CANNAZZA G, CATALDO A, et al. Measurement system for evaluating dielectric permittivity of granular materials in the 1.7-2.6-GHz Band[J]. Ieee transactions on instrumentation and measurement,2016, 65(5):1051-1059.
[12] ZHANG B, NI Y W, ZHONG Y H, et al. Influence of temperature on the dielectric properties of asphalt mixtures[J].Journal of materials in civil engineering,2022,34(4):04022008.
[13] JOHNSTON B J, RUFFELL A, WARKE P, et al. 3DGPR for the Non-Destructive Monitoring of Subsurface Weathering of Sandstone Masonry[J].HERITAGE,2019,2(4):2802-2813.
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
山东工业技术(2016年24期)2017-01-12
航空兵器(2016年4期)2016-11-28
体育时空(2016年9期)2016-11-10
体育时空(2016年9期)2016-11-10
中学课程辅导·教师教育(中)(2016年9期)2016-10-20
科技视界(2016年11期)2016-05-23
航空学报(2015年4期)2015-05-07
振动、测试与诊断(2014年5期)2014-03-01
新疆人文地理(2009年4期)2009-09-24