基于改进PID的多电机功率平衡的研究
2024-04-18 12:06袁炜徐燕飞赵鹏程卓旭
廊坊师范学院学报(自然科学版) 2024年1期
关键词:仿真
袁炜 徐燕飞 赵鹏程 卓旭


【摘 要】 矿用多电机复杂系统中,电机之间输出功率不平衡不仅会影响系统的整体性能,还会导致电机寿命缩短,严重时甚至造成电机损坏和系统瘫痪,故对多电机功率平衡问题的研究十分重要。以煤矿井下多电机驱动的带式输送机为例,设计了基于动态神经网络的PID控制器,建立了多电机驱动的输送机控制模型,提出基于ANNPID控制器的转矩控制方案。利用Matlab/Simulink软件进行仿真,结果证明该方案可以提高系统性能,增强系统的稳定性和可靠性。
【关键词】 多电机功率平衡;ANNPID;转矩控制;仿真
Research on Power Balance of Multi-Motor Based on Improved PID
Yuan Wei1,2, Xu Yanfei3, Zhao Pengcheng4, Zhuo Xu1
(1.Huainan Normal University, Huainan 232000, China;
2.Philippine University of Science and Technology, Manila 0900, Philippines;
3.National Engineering and Technology Research Institute of Coal Mining, Huainan 232000, China;
4.Huaihe Energy Group Information Management Service Center, Huainan 232000, China)
【Abstract】 In complex mining multi-motor systems, the imbalance of output power between motors not only affects the overall performance of the system, but also shortens the lifespan of the motor, and in severe cases, even causes motor damage and system paralysis. Therefore, the study of multi-motor power balance is very important. Taking the belt conveyor driven by multi-motors in coal mines as an example, the author analyzes the reasons and research status of power imbalance during the operation of multi-motors, designs a PID controller based on dynamic neural network, establishes a control model for a multi-motor driven conveyor and proposes a torque control scheme based on ANNPID controller. After simulation by using Matlab/Simulink software, the results show that this scheme can improve system performance, enhance system stability and reliability.
【Key words】 multi-motor power balance; ANNPID; torque control; simulation
〔中图分类号〕 TP29 〔文獻标识码〕 A 〔文章编号〕 1674 - 3229(2024)01- 0058 - 06
0 引言
多电机功率平衡是指在一个系统中有多个电机运行时,确保各个电机之间功率分配合理,以实现整体系统的高效、稳定运行[1]。这在许多工业和工程应用中都非常重要,然而驱动点的增多使得多台电机输出功率分配不平衡。若多电机长时间在功率不平衡状态工作,会导致个别或部分电机因超载或欠载,使用寿命缩短,严重时会造成电机损坏、系统瘫痪。反之,如能够实现多电机功率合理分配,不仅可以更好地保护电机,还能提高系统整体的工作效率[2]。
多电机功率不平衡时,各电机的输出功率与其额定功率之比不一致,主要有两类因素影响多电机功率平衡:(1)静态因素,如摩擦因数、滚筒直径、各电机的机械特性等;(2)动态因素,如皮带张力变化、负载扰动、电动机输出的电磁转矩等[3]。近年来,国内外相关学者致力于研究多电机功率平衡问题并取得一些进展。文献[2]建立了被控对象液体粘性软启动的电机模型,提出了基于PID的功率平衡控制方法,仿真表明输送机启动比较平稳。文献[3]阐述了传送带与其驱动装置之间的关系,提出了液粘软启动装置的联接方式,给出了多电机驱动时多电机功率分配平衡的可行性方案。文献[4]提出一种控制策略,将BP神经网络的学习能力与PID控制的快速响应能力结合实现各电机功率平衡控制。
1 高精度随动ANNPID控制器设计
为解决传统PID控制器对[KP]、[KI]、[KD]控制参数不能自我调整的问题,本文将具有非线性及自学习能力的人工神经网络ANN与PID控制策略相结合,克服了传统PID参数不能自主在线调整的问题,提高了控制的精度,丰富了ANN的应用途径。
图1为动态神经网络PID控制器结构图。ANN采用前馈型结构,可根据系统输入、输出以及误差信息,进行动态学习与修正,来实现对[KP]、[KI]、[KD]的自我调整[3]。
选取动态神经网络ANN为基于BP学习算法的三层前馈型4-5-3网络拓扑结构,I=4,J=5,K=3。系统给定为[r(n)],实际输出为[y(k)],则控制系统单路输出的偏差为:
[e(n)=r(k)-y(k)]
定义系统输出均方误差的二次型准则函数为:
[En=12e2n=12rn-y(n)2]
为加快ANN的收敛速度,添加惯性项,则每次的修正幅度为:
[?wn=-μαEnαw+α?wn-1]
[α*Enαw=αEnαy(n)αynα?u(n)α?u(n)αO(n)αOnαnet(n)αnetnαw] 上式中,[μ]为迭代步长,[α]为惯性系数。本文使用[sgnαy(n)αu(n)]去近似[αy(n)αu(n)]。通过运算修正后,隐含层和输出层权系数为:
[?wjkn=α?wjkn-1+μ1δKkOJj(n)]
[δKk=ensgnαynα?unα?unαOKknf'2[netKk(n)]]
其中[k=1、2、3],修正后输入层和隐含层的权系数为:
[?wijn=α?wijn-1+μ2δJjOIi(n)]
[δIi=f'1[netJj(n)]k=13δKkwjk(j=1,2,…,5])
根据[KP]、[KI]、[KD]为正值,隐含、输出两层的激活函数[f1[netJj(n)]]、[f2[netKk(n)]]分别选择对称[Sigmoid]函数和非负[Sigmoid]函数:
[f1x=ex-e-xex+e-x],[f2x=exex+e-x]
[f'1x=1-f1x/2],[f'2x=1-f21x/2]
2 多电机功率平衡控制模型建立
针对具有变频调速功能的交流电动机驱动系统,可通过改变电源频率f来调整电机转速n,获得启动电流小、功率因数和传动效率高、电机启动平稳等优点[4]。本文以双电机驱动带式输送机模型为例进行研究,如图2所示。
2.1 双电机驱动的带式输送机模型
由于异步感应电机具有非线性、强耦合的特点,故以交流异步电动机为研究对象。为实现对交流电机转矩的良好控制[5],可采用三相电机磁场矢量控制(VC)方法。
图3中,给定转速[ω?],控制器输出两相定子直流转矩分量参考值[i?t]和励磁分量参考值[i?m],经过[VR-1]坐标变换得到两相交流分量[i?α和i?β],再经过[23]变换得到交流定子电流参考值[i?A]、[i?B]、[i?C],由转速[ω1]控制的变频器输出三相电流,再经[32]变换和[VR]变换后,获得定子电流的转矩、励磁分量,最后计算出直流电动机转速并反馈给转子磁链控制器,形成闭环控制。对电机动态数学方程进行坐标变化,将异步电动机的数学模型由三相交流坐标系表示转换为两相正交旋转坐标系表示,可得到:
(1)电压方程
不考虑零轴分量有:
[usdusqurdurq=Rs 0 0 00 Rs 0 00 0 Rr 00 0 0 Rrisdisqirdirq+pψsdψsqψrdψrq+-ω1ψsqω1ψsd-(ω1-ω)ψrd(ω1-ω)ψrd]
式中[usd]、[usq]、[isd]、[isq]为定子相电压、相电流,[urd]、[urq]、[ird]、[irq]为转子相电压、相电流;[Rs]、[Rr]为定、转子电阻,[p]替换[ddt]。[ψsd]、[ψsq]、[ψrd]、[ψrq]为各相全磁链;[ω1]为定子同步角速度;[ω]为转子转速。
(2)磁链模型
不考虑零轴分量有:
[ψsdψsqψrdψrq=Ls 0 Lm00 Ls 0 LmLm0 Lr 00 Lm0 Lrisdisqirdirq]
式中[Lm]为定、转子互感,[Ls]为定子等效自感,[Lr]为转子自感。
(3)转矩方程
不考虑零轴分量有:
[Te=npLm(isqird-isdirq)]
(4)运动方程
忽略传动机构的摩擦及弹性,可以列出运动方程:
[ Te=TL+Jnpdωdt]
2.2 膠带控制模型建立
由于胶带具有粘弹性,故可以考虑通过建立一个基本的粘弹性模型来代替胶带的动力模型。带式输送机的皮带一般刚度较强,且常带有恒力张紧装置,体现为蠕变特性,因此考虑采用由弹簧和阻尼器并联构成[Voigt]模型[6]。该模型为具有线性、粘弹性的力学模型,又称开尔文模型。分析应力变化与应变变化的函数关系,得到基本构方程为:[σ=Eε+ηε],当应力恒定时,有[σ=σ0],可得:[ε=σ0E1-e-Eηt],在施加的应力[σ]不变的情况下,应变[ε]随着时间的增加而增加,直到稳定。
现通过有限元分析法来建立胶带动特性模型,将[Voigt]模型分割成尽可能小的若干段,每段都用对应能反映其特性的[Voigt]数学模型来代替,且段数越多,模型越精确。有限元分析法具有高精度、强适应性等特点[7]。图4所示为有限元分析流程。
3 多电机功率平衡控制方案
目前针对多电机输出功率平衡控制策略中,电流控制法、转矩控制法、电流-转速控制法是3类较为常用的方法。
3.1 电流控制法
根据三相异步电动机功率公式P=[3UIcosφ],当[U]恒定时,电机功率与负载电流呈正比例关系,则可通过采集对各电机负载电流监测的信号,利用控制器算法调节电机的输出功率使各电机的负载率相等,从而达到多电机功率的平衡[8]。
3.2 转矩控制法
由[P=Ten9550]可知,当保持转速接近恒定时,功率[P]与转矩[Te]成正比。对转矩信号进行监测,并将采集到的信号输入给控制器来实现多电机功率的平衡[9]。
3.3 电流-转速控制法
由公式[P=Ten9550],建立输出功率[P]、电流[I]和转速[n]之间的关系。为控制电机的转速,系统采用电流互感器采集转速、电流信号并传输给控制器。通过改变电机转速来调节输出负载功率,实现电机之间功率的平衡输出。
转矩控制具有优良的动静态性能,结构简单,参数变化对系统影响小,响应迅速且无超调,故采用转矩控制来解决多电机功率平衡的问题。图5为双电机驱动带式输送机控制系统结构简图,利用变频器实现对电机的驱动,进而通过电机带动减速机、滚筒等传动机完成对带式输送机的拖动,使带式输送机正常运行。
控制器给定相同时,刚性连接基本能够保证和满足各电机转速的同步。根据多电机功率平衡要求,两个电机之间的输出功率应满足以下条件:
[P1Pn1=P2Pn2]
[PS=P1+P2]
[P1=T1ω1],[P2=T2ω2]
式中,[Pn1]、[Pn2]为额定功率,[Ps为系统功率,][P1、P2为电机输出功率],[T1]、[T2]为输出转矩,[ω1]、[ω2]为电机转动角速度。
由于刚性连接下各电机的转速基本保持一致,即[ω1=ω2],那么两台电机理想的功率分配比,也就是转矩分配比为:
[T1T2=P1P2=Pn1Pn2=K]
根据公式[P=Te*n],只需要控制各个电机的输出转矩保持一致即可。
图6为双电机功率平衡主从控制策略原理图,主电动机根据系统给定速度进行速度、磁通控制,从电机根据主电机的输出转矩以及其与主电机转矩理想的分配关系进行转矩的控制,跟随主机转矩以达到功率平衡的目的。
4 多电机功率平衡的仿真验证
4.1 动态神经网络PID控制性能验证
通过Matlab2020b,采用Simulink对动态神经网络PID控制器的性能进行仿真验证,比较其与传统PID控制器在同一控制对象下控制性能的差异,判定动态神经网络PID控制器是否有优越性[10]。
ANNPID控制器参数设定为:ANN网络结构选取为[4-5-3],学习速率[μ=0.5],惯性系数[α=0.5]。仿真步长类型选择[Fixed-step],输入给定选用单位阶跃信号,仿真时长为10[s]。下面的仿真均采用上述控制器参数。
(1)一阶惯性环节[GO(S)]
采用串联校正的方式对被控对象进行闭环跟踪控制,其结构控制如图7所示。
典型一阶惯性环节传递函数为:[Gos=K1Ts+1]。
经过串联校正之后得到I型系统的开环传递函数为:[Gs=GcsGos=K1K2s(Ts+1)=Ks(Ts+1)],选取被控对象[Gos=10.25s+1],则可知[K=2],[T=0.25]。图8为Simulink绘制电路图仿真验证。
图9为ANNPID跟踪惯性环节仿真验证结果,其中红色实线为ANNPID控制器的跟踪波形,蓝色实线为给定信号,绿色实线为传统PID控制器的跟踪波形。可知,采用ANNPID控制的跟踪误差和超调量都比较小,且响应速度较快,控制效果优异性显著。
(2)时变系统
为了测试ANNPID控制器跟踪时变系统的性能,对控制对象添加时变因子,参数T不再为常数,有:
[Gos=K1Tvs+1=K10.25+0.15sin60ts+1]
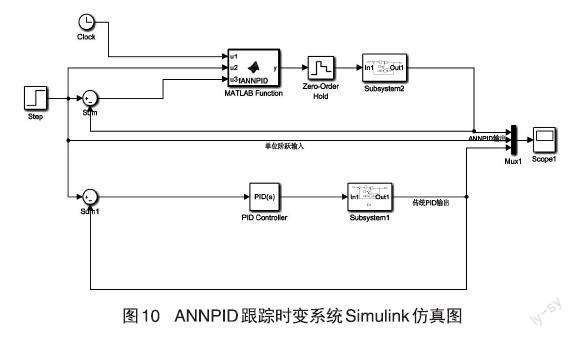
对该时变对象进行验证分析,两个控制器的仿真及控制参数均保持不变。图10为ANNPID跟踪时变系统Simulink仿真图。图11为ANNPID跟踪时变系统Simulink仿真结果,其中红色实线为ANNPID控制器的跟踪波形,紫色实线为给定信号,绿色实线为传统PID控制器的跟踪波形。明显可知,采用ANNPID控制的跟踪误差和超调量都比较小,响应速度较快,而且跟踪过程中受系统变化的影响较小,抖动较小,控制效果优异。
通过上述验证和分析可知,ANNPID控制器与传统PID控制器相比,响应迅速、静差较小,控制性能更好,具有更好的动态特性。
4.2 转矩控制与ANNPID控制器复合控制方案验证
对引入ANNPID控制器刚性连接的双电机驱动输送機控制系统的功率平衡问题进行分析验证。系统给定转速为600[r/min],功率分配比为1:1时,两台异步电动机均空载启动,在[t]=0.3[s]添加系统总负载,大小为60[N?m],[t]=0.4[s]负载大小变为110[N?m],仿真得到图12的双电机输出转矩变化波形图。
图中红色实线为主电机输出转矩,绿色实线为从电机输出转矩。从电机跟踪主电机同步精度高,负载率相同,实现了两台电机之间的功率平衡,验证了将多电机功率平衡转矩控制与ANNPID控制器进行复合控制,可以實现多电机功率平衡控制,且控制性能良好。
5 结语
本文提出了多电机转矩控制方案,采用Matlab/Simulink软件进行仿真,验证了ANNPID控制器良好的控制性能。最终采用转矩控制与ANNPID控制器复合控制方案,很好地实现了多电机运行时功率的合理分配,达到输出功率平衡控制的目的,增强了系统的稳定性和可靠性。
[参考文献]
[1] 王伟.口袋布自动缝制设备多电机偏差耦合同步控制技术研究[J].廊坊师范学院学报(自然科学版),2023,23(2):27-31.
[2] 罗明华.带式输送机多电机功率平衡PID控制仿真研究[J].自动化与仪器仪表,2017(4):22-24.
[3] 张浩.煤矿带式输送机多电机驱动功率平衡性控制研究[J].煤矿现代化,2016(1):88-89.
[4] 杨昆. 基于功率平衡的多电机驱动带式输送机的节能策略研究[D].合肥:合肥工业大学,2016.
[5] 宁君宇,储昭碧,张康,等.基于模糊PID控制的多电机功率平衡控制研究[J].煤矿机械,2015,36(9):295-298.
[6] 杨光辉. 基于模糊神经网络的多电机功率平衡控制研究[D].徐州:中国矿业大学,2014.
[7] 陈蕾蕾,程林琳,熊兴中.三相异步电机矢量控制系统[J].四川轻化工大学学报(自然科学版),2021,34(6):79-84.
[8] 刘丽超. 基于神经网络的异步电动机随机自适应动态面控制[D].青岛:青岛大学,2017.
[9] 祁辰,孟文俊,赵建飞,等.压带带式输送机输送带有限元分析[J].起重运输机械,2021(13):54-57.
[10] 赵国庆,王云龙,马小云,等.长距离管带机多机可控驱动方案的对比研究及应用[J].中国管理信息化,2019,22(23):72-73.
[11] 耿婧.基于模糊PID的智能小车单片机温度控制技术[J].廊坊师范学院学报(自然科学版),2022,22(4):30-36.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21