
基于扩展卡尔曼滤波的多传感器目标跟踪*
2010-04-26 05:08潘丽娜
舰船电子工程 2010年12期
潘丽娜
(海军航空工程学院基础部 烟台 264001)
1 引言
靠单一的信息源已很难保证获取环境信息的快速性和准确性,以及给系统对周围环境的理解及系统的决策带来的影响。另外,单一传感器获得的仅是环境特征的局部、片面的信息,信息量十分有限,而且每个传感器采集到的信息还受到自身品质、性能噪声的影响,信息往往是不完整的,带有较大的不确定性,甚至出现错误。通常在传统方式中,各传感器采集的信息是单独、孤立地进行加工处理的。这不仅会导致处理工作量增加,而且割裂了各传感器信息的联系,丢失了信息的有机组合蕴涵的信息特征,也造成信息资源的浪费[1~5]。
在多传感器跟踪中,系统可能是非线性的。对这类系统,直到现在,在理论上还没有一套严格的滤波公式。目前所用的算法都是近似的,比较常用的非线性滤波方法,包括扩展Kalman滤波、不敏Kalman滤波、粒子滤波和基于修正极坐标的非线性滤波方法[6~7]。本文主要就扩展Kalman滤波进行展开。下面给出具体仿真环境研究扩展Kalman滤波解决多传感器目标跟踪问题,仿真结果表明该方法在解决多传感器目标跟踪问题的优势。
2 扩展卡尔曼滤波(EKF)
在线性、高斯情况下的Kalman滤波,由均值和协方差构成的充分统计量的递推计算是最简单可行的状态估计滤波。在具有非高斯随机变量的线性系统情况下,同样简单的递推式产生近似的均值和协方差:最佳线性估计。因此,对非线性系统,需要类似的结构。这种估计叫Kalman滤波(EKF),并可通过对非线性动态和量测方程的级数展开得到。
非线性系统离散动态方程表示为

为了便于数学处理,假定没有控制输入,并假定过程噪声是附加的零均值白噪声;且噪声分布矩阵 G(k)已知,即
假定过程噪声和量测噪声序列是彼此独立的,并且有初始状态估计(0)和协方差矩阵P(0)。
和线性情况一样,假定在k时刻有估计

它是一个近似的条件均值,相伴的协方差是P(k|k)。鉴于(k)不是精确的条件均值这个事实,所以,严格地说,P(k)是近似的均方误差,而不是协方差。
3 仿真分析
下面给出利用对二维平面内的目标进行跟踪的仿真环境。
传感器平台在x-y平面内运动,运动方程为

其中:t为时间,Δx,Δ y是相互独立的、零均值白色高斯噪声,其方差分别为rx=1和ry=1,且与过程噪声和量测噪声相互独立。
目标在y轴方向上运动,系统的状态方程为

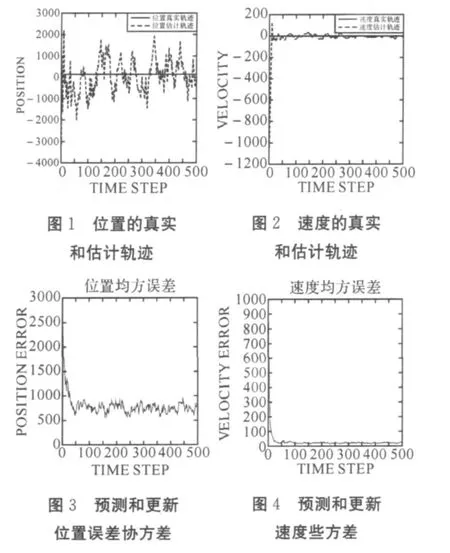
若在仿真中采用Monte Carlo实验方法,过程噪声和量测噪声在每次Monte Carlo循环时都必须重新产生,否则将会导致有偏估计。主要原因是:仿真时所加的过程噪声和测量噪声都是高斯白噪声,是由伪随机数产生的,因而每次仿真时必须重新产生新的种子数。故在实验中,进行了500步的跟踪仿真,并且使用蒙特卡洛(Monte Carlo)方法进行了50次的平均,以消除随机性的影响。由仿真曲线图1~图4可以看出:
1)目标预测和更新的位置、速度方差收敛较快,位置与速度的跟踪没有发散,效果是比较好的。
2)位置与速度的均方误差随着时间的增加趋于一个稳定的常数。
3)通过增加蒙特卡罗仿真次数可以提高收敛速度。
4 结语
本文在研究扩展Kalman滤波方法的基础上,通过具体仿真环境对多传感器目标跟踪问题进行分析比较。仿真结果表明目标预测和更新的位置、速度方差收敛较快,而且位置与速度的跟踪没有发散,能够很快趋于平稳,跟踪效果很好,充分表明该方法在解决多传感器目标跟踪问题的优势,使多传感器目标跟踪问题具有实际意义。
[1]Ashruf Elnugur.Predicion of Moving Objects in Dynamic Enviroments Using Kalman Filters[C]//IEEE International Symposium on Computation Intelligence in Robotics and Automation,2001:414~419
[2]Dolye R S,Harris C J.Multi-sensor Data Fusion for Helicopter Cuidance using Neuro-fuzzy Estimation Algorithms[J].The Aeronautical Journal,1996(6):241~251
[3]赵宇,吴丽竹.多传感器信息融合的实现[J].中国科技信息,2008(8):42~44
[4]王丽,杨全胜.多传感器数据融合的一种方法[J].计算机技术与发展,2008,18(2):80~82
[5]高崇,潘泉,肖秦琨.多传感器自适应滤波融合算法[J].电子与信息学报,2008,30(8):1901~1904
[6]何友,王国宏,等.多传感器信息融合及应用[M].第二版.北京:电子工业出版社,2007
[7]何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
计算机应用与软件(2019年2期)2019-04-01
经济研究导刊(2018年19期)2018-07-24
数学大世界(2018年35期)2018-02-22
雷达学报(2017年3期)2018-01-19
发明与创新·中学生(2017年5期)2017-05-12
考试周刊(2016年54期)2016-07-18
