
潜艇机动规避主动定向声纳浮标方法研究*
2010-04-26 05:08纪金耀楼晓平
舰船电子工程 2010年12期
纪金耀 薛 涛 楼晓平
(海军潜艇学院 青岛 266071)
1 引言
近年来,国内外对航空探潜的建模与仿真开展了大量的研究工作,取得了一定的成果[1~2]。声纳浮标是反潜飞机和部分反潜直升机搜索、探测和跟踪水下潜艇的主要器材。从工作方式上可分为被动式和主动式两大类[3]。由于被动声纳浮标属于隐蔽性对潜观察器材,通常情况下,处于水下的潜艇无法感知其对潜搜索、探测及跟踪的征候,因而对被动浮标搜索往往无从进行规避或对抗。而主动声纳浮标属于暴露性探测器材,易被潜艇所感知。机载监视设备通过无线电超高频指令控制浮标,并接收主动声纳浮标对水下目标主动测距、测向及多普勒信息[4]。主动声纳浮标可以实现对潜艇的精确定位,直接为对潜攻击提供确定的位置信息,因而对潜艇的威胁常常是致命的[5]。所以,分析研究潜艇机动规避主动声纳浮标方法,对于提高潜艇在作战中的生存能力具有重要意义。
根据不同的海洋战场环境、兵力态势、浮标数量的多少和浮标阵布设时机等因素可以布设不同的阵形,所以,主动定向声纳浮标的布阵方式可以是多种多样的。在此,我们仅针对常用的三枚和四枚主动浮标阵形为例,分析潜艇机动规避的方法。
2 主动定向声纳浮标对潜跟踪定位方法
反潜飞机在应召搜索潜艇或发现潜艇之后以及使用武器之前,往往采用主动定向声纳浮标对潜艇实施跟踪和定位。主动定向声纳浮标既能测定浮标与潜艇之间的距离,又能测出方位。因此,使用主动定向浮标跟踪潜艇时,只需要一枚浮标保持与潜艇接触就能对目标进行定位。为了达成对潜攻击的要求,通常情况下需要使用三枚或四枚主动定向声纳浮标,根据潜艇可能散布区域的大小布设成一定的阵形,以便控制一定的区域范围并实现定位。
2.1 三枚主动声纳浮标阵的布设阵形与布设方法
布设阵形与时机有很大的关系,布设三枚主动声纳浮标的时机主要有:1)针对小区域实施布设。由于主动定向声纳浮标作用距离往往较小,并且在最后攻击阶段要求定位误差尽可能小,所以,主动定向声纳浮标往往专用于小区域对潜定位跟踪。2)延迟时间在5min以内。当反潜飞机通过雷达或目视得到的潜艇概位(基准点),同时潜艇通过雷达侦察仪或潜望镜发现反潜飞机后立即下潜规避,为了能够在较小区域内发现水下潜艇,延迟时间往往要求比较短,因此通常情况要求延迟时间在5min以内。

具体布设时,以潜艇概位(基准点)为中心、2000码(1829m)或当日主动声纳浮标侦测距离为半径的圆周上,成等边三角形的态势布设3枚浮标,构成一个声纳浮标圆形阵,如图1所示。布设时,首先在潜艇的概略航向上布设一枚浮标,然后依次布设其他两枚浮标,最后飞到潜艇概位点或疑似潜艇位置区上空进行监听。
2.2 四枚主动声纳浮标阵的布设阵形与布设方法
四枚主动声纳浮标布设的一般适用时机为:1)当使用布设三枚浮标时的主动声纳浮标阵无法有效定位潜艇时。2)通过雷达或目视得到的潜艇概位(基准点)或者当反潜飞机进行应召搜索时,反潜飞机抵达基准点上空的迟到时间在10min以内。
具体布阵为:在以潜艇概位(基准点)为中心、4000码(3658m)为半径的圆周上,每间隔90°布设l枚主动声纳浮标,构成声纳浮标圆形阵。该阵形要求单枚主动声纳浮标的当日侦测距离大于2000码(1829m),以使各浮标的搜索区域有一定程度的重叠。如图2所示。具体布设过程类似于三枚声纳浮标阵的布设。
3 潜艇规避主动声纳浮标阵的仿真计算
为了更好地分析研究潜艇机动规避主动声纳浮标阵的探测跟踪,我们借助于Window s平台,采用编程工具Visual C++6.0,对主动声纳浮标的探测区域进行模拟仿真。通过模拟仿真,计算出潜艇规避声纳浮标阵探测的速度和时间,进而得出潜艇机动规避声纳浮标阵跟踪的一般方法。
3.1 仿真软件的运行界面
仿真软件运行界面如图3所示。
潜艇规避主动声纳浮标阵仿真过程的逻辑描述为:
1)确定声纳浮标阵形和参数;
2)将潜艇的位置、声纳浮标阵的基准点位置、每个声纳浮标的位置转化为屏幕坐标;
3)根据潜艇规避航向,生成潜艇在规避时的相应态势;
4)在每一步,实时解算潜艇与每个声纳浮标之间的距离、舷角,结合潜艇规避声纳浮标阵各要素的计算公式进行计算。
5)仿真结束后,输出计算结果。
3.2 潜艇规避声纳浮标阵各要素的计算
3.2.1 三枚声纳浮标的机动规避计算
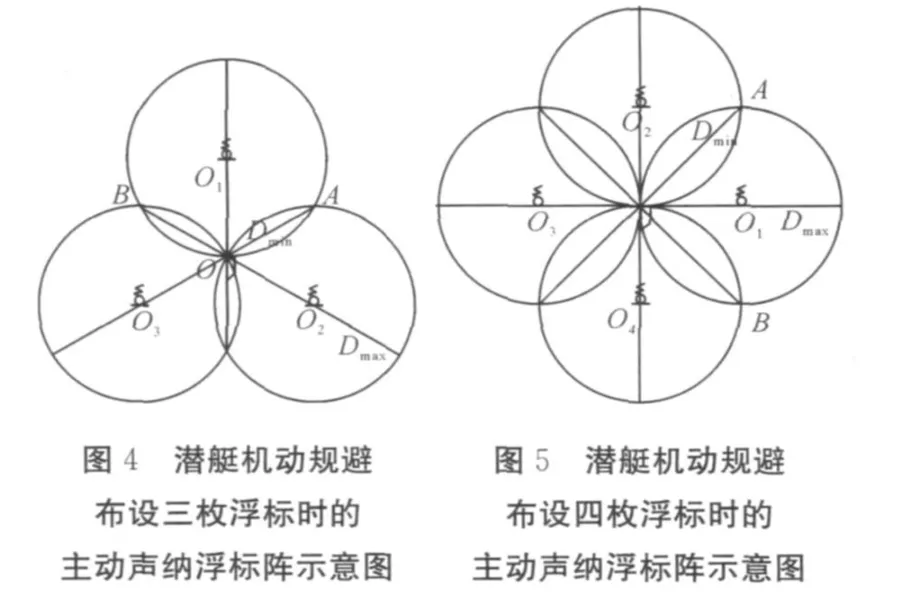
潜艇机动规避布设三枚浮标时的主动声纳浮标阵示意图如图4所示。
潜艇驶出主动声纳浮标阵作用区域所经过的最小距离Dmin由下式计算:

式中:MDR为主动声纳浮标侦测距离。
潜艇驶出主动声纳浮标阵作用区域所经过的最大距离Dmax由下式计算:

潜艇规避航向上航行时间Tgb由下式计算:

图3 仿真软件运行界面

式中:O1O2、O2O3、O3O1为主动声纳浮标之间的距离;Vbs为反潜飞机布设主动声纳浮标时的速度;Tjt为反潜飞机从布设完主动声纳浮标阵至飞至听测空域的时间。
潜艇走出主动声纳浮标阵的规避速度Vqgb由下式计算:

3.2.2 四枚声纳浮标的机动规避计算
潜艇机动规避布设四枚浮标时的主动声纳浮标阵示意图如图5所示。
潜艇驶出主动声纳浮标阵作用区域所经过的最小距离Dmin由下式计算:

式中:MDR为主动声纳浮标侦测距离。
潜艇驶出主动声纳浮标阵作用区域所经过的最大距离Dmax由下式计算:

式中 :O1O2、O2O3、O3O4、O4O1为主动声纳浮标之间的距离;Vbs为反潜飞机布设主动声纳浮标时的速度;Tjt为反潜飞机从布设完主动声纳浮标阵至飞至听测空域的时间。
潜艇走出主动声纳浮标阵的规避速度Vqgb由下式计算:

4 计算结果与分析
主动定向声纳浮标通过发射和接收主动声纳脉冲信号来测定目标与浮标间的距离,水下潜艇在听测到主动声纳浮标声脉冲信号时(意味着将被攻击),可以根据主动浮标的使用特点和信号特征识别出主动声纳浮标的探测,并可以通过各主动声纳浮标的声纳方位判断出大致的态势,合理利用当时情况下的水文条件,采取适合的规避措施,以摆脱主动声纳浮标对本艇的探测、跟踪,减少被攻击的可能性或降低被反潜武器毁伤的概率。
4.1 计算结果
假设反潜飞机以220km/h的速度依次布设主动声纳浮标,第一枚布设在潜艇的概略航向线前方。潜艇声纳突然听测到航向线附近有声纳浮标落水噪音或声纳浮标脉冲信号。
据此,利用仿真计算可得出不同主动声纳浮标侦测距离MDR(单位nm)时,最小浮标阵侦测距离Dmin(单位 nm),最大浮标阵侦测距离Dmax(单位nm),潜艇规避时间Tgb(单位min),潜艇规避速度Vqgb(单位kn)。
基于声波在水中直线传播距离往往比较近,在此,我们仅针对MDR 分别为1nm、2nm、3nm、4nm的情况进行仿真计算。三枚、四枚主动声纳浮标布阵时各要素结果分别见表1,表2。
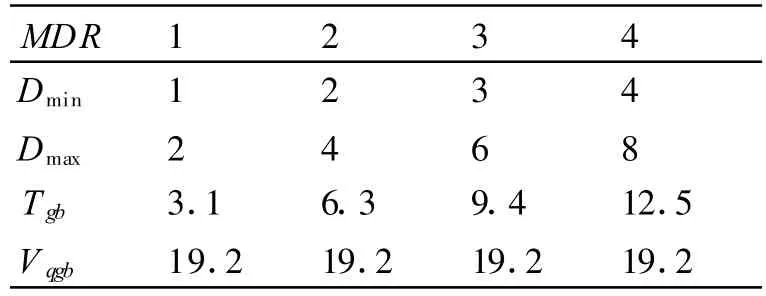
表1 潜艇规避三枚主动声纳浮标阵时各要素的结果

表2 潜艇规避四枚主动声纳浮标阵时各要素的结果
4.2 分析与结论
4.2.1 各要素计算结果的分析
1)声纳浮标探测区域分析
由表1、表2及图 4、图 5可见,两种阵形的声纳浮标的最大探测区域所涵盖的范围都是平均探测距离的2倍,且都处于基准点与声纳浮标的连线上。而最小探测区域所涵盖的范围因阵形不同而有所不同:三枚时,最小探测区域所涵盖的范围就是平均探测距离,且偏离于基准点与声纳浮标连线60°的方位上;四枚时,最小探测区域所涵盖的范围是平均探测距离的 2倍,且偏离于基准点与声纳浮标连线45°的方位上。
2)规避速度分析
由表1、表2可见,潜艇规避速度取决于潜艇驶出主动声纳浮标阵作用区域的最小距离Dmin和潜艇规避航向上航行时间Tgb。并且不同声纳浮标的平均探测距离下,Dmin与Tgb的比值为一定值。
3)潜艇规避时间分析
由表1、表2可见,潜艇规避声纳浮标阵所需时间与声纳浮标的平均探测距离的大小成正比关系。即主动声纳浮标的平均探测距离越大,潜艇脱离声纳浮标阵所需时间就越长。
4.2.2 结论
根据仿真结果得出潜艇机动规避主动声纳浮标阵的具体行动方法。当潜艇航向线附近发现主动声纳浮标时,根据浮标阵的使用时机判断可能将会布设的主动声纳浮标阵阵形,立即加速下潜到有利于规避的水层,同时大角度转向,若判断是由三枚浮标组成的主动声纳浮标阵,则转向±60°(如图4所示,OA、OB航向可最快脱离声纳浮标阵),采用20kn速度航行10min以上,然后改为最大小噪音航速沿规避航向航行。若判断是由四枚浮标组成的主动声纳浮标阵,则转向±45°(如图5所示,OA、OB航向可最快脱离声纳浮标阵),采用25kn速度航行11min以上,然后改为最大小噪音航速沿规避航向航行。显而易见,20kn和25kn的高速对于常规潜艇(“基洛”级常规动力潜艇最大航速为19kn)而言是不可能达到的,所以,常规潜艇规避该阵形单纯采用纯机动方法是不可行的,而对于核潜艇而言采用高速时的航行噪声也必然很大,所以不宜长时间使用高速进行规避,应该适时改为最大小噪音航速进行规避航行。
对于潜艇规避航向上航行时间Tgb的计算是建立在不考虑浮标接受指令激活时间和浮标位置校正时间的假设基础上。目前较先进的主动定向声纳浮标大都具有指令控制功能,浮标入水后接受指令激活。若布设浮标阵时间增加1min,则由三枚浮标组成的主动声纳浮标阵当侦测距离为2nm时潜艇可以16.4kn的速度进行规避。即在这种条件下布设浮标阵的时间每分钟约对应2.7kn的规避速度。由四枚浮标组成的主动声纳浮标阵当侦测距离为2nm时潜艇可以22kn的速度进行规避。即在这种条件下布设浮标阵的时间每分钟约对应3.2kn的规避速度。
5 结语
本文通过仿真的方法得出潜艇在不同阵形中、不同态势下的最优规避方法。但本文讨论的声纳浮标阵仅以常用的三枚和四枚主动浮标阵为例,而在实际跟踪过程中,反潜飞机可能追加声纳浮标对潜艇实施探测,还可能使用多种声纳浮标或者其他声纳浮标阵型进行探测,以上问题尚待进一步研究。
[1] Martin.Muitiplyingthe effectiveness of helicopter ASW sensors[J].Sen Technology,2006,47(11):33~36
[2]董文洪,样日杰,田宝国.双基地航空搜潜建模与仿真[J].测试技术学报,2006,20(4):304~308
[3]孙明太.航空反潜战术[M].北京:军事科学出版社,2003
[4]AN/SSQ-62B/C/D/E Directional Command Activated Sonobuoy System(DICASS).[2003-01-03].http://www.fas.org/man/dod-101/sys/ship/weaps/an-ssq-62.htm
[5]高学强,杨日杰,杨春英.潜艇规避主动声纳浮标作战效能影响研究[J].系统工程与电子技术,2008,30(2):301~304
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
华中建筑(2022年4期)2022-04-14
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
小哥白尼(趣味科学)(2019年6期)2019-10-10
小学科学(学生版)(2019年6期)2019-07-10
山东工业技术(2017年24期)2017-12-29
无人机(2017年10期)2017-07-06
西部资源(2017年3期)2017-07-05
敦煌研究(2017年3期)2017-07-05
