采用TMS320F28335 DSP实现六相SVPWM*
2011-09-12 07:45潘海鸿黄海明黄炳琼
组合机床与自动化加工技术 2011年10期
潘海鸿,封 华,陈 琳,黄海明,黄炳琼
(广西大学机械工程学院,广西南宁 530004)
采用TMS320F28335 DSP实现六相SVPWM*
潘海鸿,封 华,陈 琳,黄海明,黄炳琼
(广西大学机械工程学院,广西南宁 530004)
多相电机驱动是解决低压大功率驱动的一种重要方式。拟以双Y相移30°的六相永磁同步电机为被控对象,将已有的三相SVPWM算法推广到六相SVPWM,提出采用TMS320F28335 DSP作为功率驱动器主控芯片,推导出实现六相SVPWM过程中12个扇区内ePWM硬件模块控制规律和实现步骤。搭建实验平台实现六相SVPWM控制方法,实验结果表明采用TMS320F28335 DSP能够实现算法复杂的六相SVPWM,输出波形与理论相符合。
多相电机;SVPWM;TMS320F28335;数字信号处理器
0 引言
多相电机SVPWM技术一直是多相电机驱动技术中研究的重点。多相电机系统与传统三相电机系统相比,其具有运行可靠性高、转矩脉动小、电机效率高、易实现低压大功率输出等优点[1-3]。然而,多相电机的驱动控制算法复杂,计算量大,如何实现多相电机的控制是目前电机控制领域的研究热点。
数字信号处理器(Digital Signal Processor,DSP)运算能力强,处理速度快,实时性好,片内集成了丰富的外设模块(eCAP、eQEP、ePWM 等),适用于电机控制中,已经被用于三相SVPWM的控制中。本文拟以双Y相移30°的六相永磁同步电机为被控对象,将已有的三相 SVPWM算法推广到六相SVPWM,提出采用TMS320F28335 DSP作为功率驱动器主控芯片,根据TMS320F28335的特点推到出实现六相SVPWM方法的ePWM模块控制规律和实现步骤。该方法由伏秒平衡原理用扇区两侧大矢量合成参考电压矢量,计算出各矢量作用时间,通过搭建TMS320F28335 DSP实验平台实现12路PWM同步输出。
1 六相SVPWM控制的基本原理
多相电机由多相逆变器来驱动,多相逆变器的输出由控制器来控制。图1是六相电压源逆变器驱动双Y相移30°永磁同步电机(PMSM)示意图,图1中A、C、E和B、D、F分别为多相电机内部两套 Y绕组。它们在空间上相差30°电角度,通过六相逆变器驱动,在电机空间有64个开关状态矢量,与六相逆变器64个开关状态对应。采用矢量空间解耦变换将64个开关状态矢量投影到三个相互正交的子空间:d-q子空间、z1-z2子空间和o1-o2子空间[4]。借鉴三相SVPWM方法的思想[5],在一个PWM周期内,选取d-q子空间最大矢量和零矢量合成参考电压矢量。
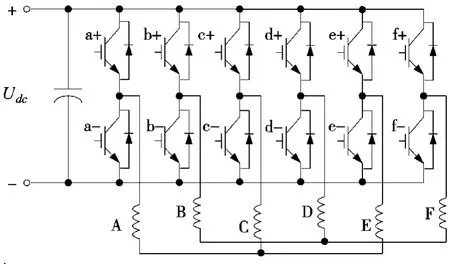
图1 电压源逆变器驱动双Y相移30°PMSM示意图
如图2所示,在d-q子空间扇区2选取扇区两侧V48、V56两个大矢量和零矢量合成参考矢量V,并定义V48、V56和零矢量作用时间依次为T1,T2和T0,采样周期(PWM周期)为Ts,则根据伏秒平衡在d-q子空间有公式(1):


图2 开关状态矢量选择
求解出公式(1)中矢量作用时间T1,T2和T0,如式(2):


在一个PWM周期内,两个非零矢量若采用逆时针顺序依次作用,则在扇区1、4、5、8、9和12内桥臂PWM波形出现两个脉冲(开关两次)情况,这不利于控制波形输出[10]。为此提出采用调整矢量作用顺序的方案,使一个采样周期内各桥臂功率管只开关一次,12个扇区矢量作用顺序调整后的结果见表1。
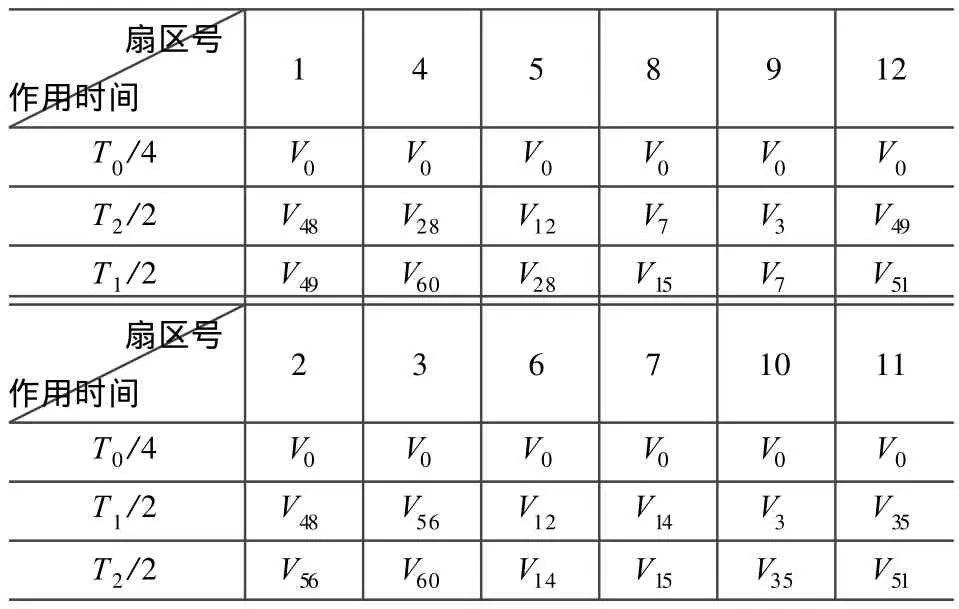
表1 12扇区矢量作用顺序表
2 TMS320F28335 DSP实现六相SVPWM框架
2.1 六相SVPWM开环系统
TMS320F28335片内有6个ePWM模块同步工作时能够输出6对互补PWM信号,能够满足输出双Y相移30°永磁同步电机所需的12路控制信号。
图3是以TMS320F28335为核心的矢量空间解耦六相电机SVPWM控制的开环系统框图。系统输入参数:调制波频率f*,矢量控制中的直流分量、;输出为逆变器6个桥臂的6对PWM控制波形信号。图3中rampgen模块用于模拟产生转子位置电角度theta,theta作为i_park变换模块的输入,两直流分量、经 i_park变换后,输出参考电压矢量(Uα和Uβ)到六相 SVPWM模块,实现六相SVPWM算法,SVPWM模块输出12路比较值到ePWM硬件模块,最终实现输出六相SVPWM波形信号,通过逻辑分析仪(logic analyzer)对波形进行观测。

图3 六相SVPWM输出开环系统
2.2 实现六相SVPWM的ePWM模块控制规律
以扇区1为例,对六相SVPWM方法ePWM模块控制规律推导过程进行说明。为了实现对称PWM波形输出,设置六个ePWM硬件模块计数方式为连续增减模式,则根据表1,依据三相SVPWM原理得到PWM在扇区1的理论波形,由矢量作用时间T1,T2和T0推导出比较值过程如图4所示。

图4 矢量作用时间与比较值转换
6个ePWM硬件模块需选择合适的比较值以确定各相PWM波形的上升沿时间,这里采用的是对称PWM输出,下降沿时间由上升时间确定。以第一路PWM波形PWM1为例,根据图4按照式(3)计算出Ton1、Ton2、Ton3,上升沿时间对应比较值Ton1,因而选择ePWM1模块比较寄存器CMPA比较值为Ton1。同样,推导出PWM2 ~PWM5对应的5个ePWM模块比较寄存器选取比较值见表2。


表2 扇区1的ePWM模块比较值选择
根据上述推导过程,对扇区2 ~扇区6情况进行分析,归纳出12个扇区PWM波形对应的ePWM模块控制规律(表3)。表3中CMPA对应ePWM模块中比较寄存器A的比较值。
2.3 实现六相SVPWM算法步骤
根据表3中12个扇区ePWM模块的控制规律,在TMS320F28335中实现六相SVPWM算法的具体步骤如下:
(1)扇区判断:根据参考电压矢量(Uα,Uβ)进行扇区判断,确定扇区号N,求Uβ/Uα反正切值计算出参考电压矢量与d轴正轴所成的角度,按12个扇区不同角度范围确定参考电压矢量所在扇区号N,同时求出参考矢量与扇区下边界矢量夹角 θ。
(2)开关状态矢量作用时间计算:根据公式(2)计算扇区内矢量作用时间T1、T2和T0。
(3)根据T1、T2时间作用顺序,完成扇区内矢量作用时间转换为比较值:如扇区1,按式(3)计算比较值Ton1、Ton2和Ton3。
(4)根据扇区号N和推导出的ePWM模块控制规律(表3),选择确定ePWM模块比较寄存器比较值,实现12路PWM波形输出。
3 实验验证与分析
3.1 实验平台
根据实验系统框图3,搭建实验平台(图5)。该实验平台主要由TMS320F28335 DSP、逻辑分析仪、仿真器和个人电脑(PC机)组成,其中TMS320F28335 DSP作为功率驱动器的主控单元。在CCS 3.3环境下设置TMS320F28335 DSP的CPU时钟为150MHz,GPIO0-GPIO11引脚为PWM输出,采样周期Ts为 200 μ s,主中断为ePWM1模块的计数器的值为零时触发中断,六相SVPWM算法(2.3节)在主中断服务程序中执行。每个PWM周期内控制程序按照ePWM模块控制规律(表3)更新ePWM模块比较值,最终实现六相SVPWM波形的实时输出。
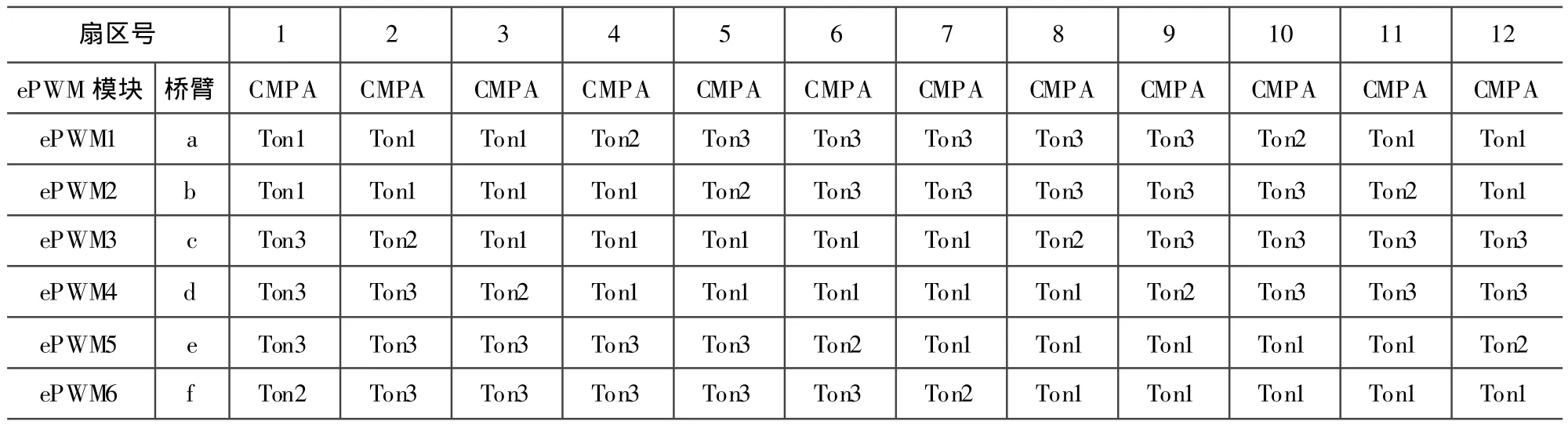
表3 12个扇区ePWM模块控制规律

图5 实验平台
3.2 实验结果与分析
采用逻辑分析仪观测PWM控制波形:实验参考电压Uα=100V、Uβ=60V,通过逻辑分析仪观测不同扇区的PWM输出(图6)。图6a为扇区1的PWM波形输出,六路波形逻辑关系与图4相同;图6b为扇区2的PWM输出,矢量作用顺序与理论(表1)相符合;图6c为输出6对带有死区的互补PWM波形,符合6相逆变器全桥控制要求[6];图6d为扇区1中a相桥臂带死区的互补PWM输出,从图中可知死区大小为6μ s。这表明 TMS320F28335 DSP的ePWM模块可实现6相SVPWM控制波形。
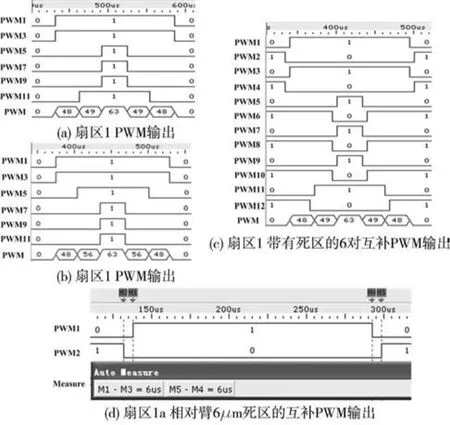
图6 逻辑分析仪实验波形
六相SVPWM开环系统实验:根据图3设定f*=100Hz,V*d=0,V*q=100V,死区时间设置为6.4 μ s,通过 CCS3.3的 graph功能查看输出波形(图7)。图7a为a相调制波形,调制波周期为0.01s;图7b为a相与c相调制波形,a相超前 c相3.4ms,即相位超前约122°,这与理论上120°相位差基本符合;图7c为a相与b相调制波形,a相超前 b相0.8ms,即相位相差约29°,与理论上30°相位差基本相符[7]。

图7 CCS中实验波形
4 结束语
采用TMS320F28335 DSP作为功率驱动器主控芯片能够实现六相SVPWM。通过研究TMS320F28335 DSP芯片电机控制外设模块ePWM模块特点,推导出实现六相SVPWM过程中12个扇区内ePWM硬件模块控制规律和SVPWM实现步骤。在TMS320F28335 DSP平台上验证六相SVPWM控制方法,实验结果证实所提出方法的正确性,输出波形与理论相符合,输出的多路PWM波形能够满足双Y相移30°的永磁同步电机驱动要求,这便于将多相SVPWM方法进行推广应用。
[1]王步来,顾伟,褚建新,等.船舶电力推进用双三相永磁同步电动机建模[J].哈尔滨工程大学学报,2009,30(4):347-352.
[2]刘东,黄进,于文娟,等.空间矢量PWM多相变频调速系统非正弦供电技术[J].电机与控制学报,2010,14(9):41-47.
[3]于飞,张晓锋,李槐树,等.五相逆变器的空间矢量 PWM控制[J].中国电机工程学报,2005,25(9):40-46.
[4]Zhao Y,Lipo T A.Space vector PWM control of dual three-phase induction machine using vector space decomposition[J].IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[5]吕宏丽,鹿玉红,江培蕾.基于TMS320F240 DSP的SVPWM实现[J].微计算机信息,2008,24(6-2):200-201.
[6]潘海鸿,陈斌,陈琳,等.考虑零电流嵌位的永磁同步电机死区效应补偿方法[J].电机与控制应用,2010,37(10):1-5.
[7]欧阳红林.多相永磁同步电动机调速系统控制方法的研究[D].湖南:湖南大学,2005.
(编辑 赵蓉)
Implementation of Six-phase SVPWM with TMS320F28335 DSP
PAN Hai-hong,FENG Hua,CHEN Lin,HUANG Hai-ming,HUANG Bing-qiong
(College of Mechanical Engineering,Guangxi University,Nanning Guangxi 530004,China)
Multi-phase motor drive is an important method to achieve the low-voltage and high-power drive.A dual three-phase Permanent-magnet Synchronous Motor(DTPMSM)is selected as the research object.The three-phase SVPWM algorithm is extended and popularized to the six-phase SVPWM.A chip of TMS320F28335 DSP is proposed as the power driver control chip to realize six-phase SVPWM.The control regular pattern of epwm hardware module within 12 sectors is derived and its implementation steps are presented.An experimental platform with TMS320F28335 DSP was build to realize the sixphase SVPWM control.The experimental results indicate that the TMS320F28335 DSP is suitable to implement the complex process of six-phase SVPWM,and the output waveforms of six-phase SVPWM are correspond to these of the theory.
multi-phase motor;space vector pulse width modulation(SVPWM);TMS320F28335;digital signal processor(DSP)
TH16;TG65
A
1001-2265(2011)10-0053-04
2011-03-28
广西科技攻关(桂科攻10100001-2);南宁市科技攻关(201003067G);广西教育厅科研项目(201106LX002)
潘海鸿(1966—),男,广西武鸣人,广西大学机械工程学院教授,工学博士,研究方向为高速高精运动控制、伺服电机控制,(E-mail)hustphh@163.com。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
防爆电机(2021年2期)2021-06-09
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
中国民航大学学报(2019年1期)2019-04-13
电子制作(2019年23期)2019-02-23
信息安全研究(2018年2期)2018-02-28