减摇鳍精度安装工艺的分析与应用
2012-01-22 11:21,,
船海工程 2012年2期
,,
(芜湖新联造船有限公司,安徽 芜湖 241000)
减摇鳍作为一种主动式减摇装置[1]应用非常广泛。该设备多安装于船舯的前、后,船体线型变化大,因此对鳍轴线、流线角的定位精度要求很高,若减摇鳍的定位、安装稍有偏差,不但会降低鳍的效率和寿命,甚至会导致鳍转动时与船壳板相碰,引发事故,因此,必须保证减摇鳍的安装精度,方能使其正常发挥作用。本文介绍了如何通过将二维坐标系统中的原始数据,转化为三维空间中的数据,并利用全站仪测量定位[2]来实现设备的精度安装。
1 设计输入
1.1 减摇鳍定位参数
1)前减摇鳍(123号肋位)。鳍轴线与船体外壳板外缘的交点B距基线 1 750 mm,鳍轴线在中总剖面的投影与水平线的夹角(即流线角)5.2°,鳍轴线在基线面的投影与肋位线的夹角11.3°,鳍轴线在中站面的投影与水平线的夹角47.9°。
2)后减摇鳍(55号肋位)。鳍轴线与船体外壳板外缘的交点A距基线1 750 mm,鳍轴线在中总剖面的投影与水平线的夹角(即流线角)4.3°,鳍轴线在基线面的投影与肋位线的夹角11.5°,鳍轴线在中站面的投影与水平线的夹角52.7°。
减摇鳍定位参数见图1。
1.2 配合公差参数
鳍座面板与鳍轴线的垂直度0.05mm,鳍根部与船壳板间隙50 mm。

图1 减摇鳍定位参数
2 所需技术参数的求解(设计输出)
2.1 求解鳍轴线空间夹角
以右舷后鳍轴系求解为例,根据减摇鳍轴线在俯视图和肋位面视图的投影关系,建立三维模型,见图2。

图2 后鳍轴线三维模型
图2中,A为鳍轴中心线与船壳板的交点,以A点为原点,X轴方向为船艏方向,建立坐标系X-Y-Z,将坐标系绕X轴顺时针旋转52.7°,得坐标系X1-Y1-Z1,然后,将坐标系X1-Y1-Z1绕Z1轴顺时针旋转α,得坐标系X′-Y′-Z′,则Y′轴即为鳍轴中心线,在此中心线上取线段AC,AC在中站面的投影为AD,AC在基线面的投影为A′C′,CD在基线面的投影为C′D′。
将△A′C′D′平移至线段CD上,建立轴线角求解的几何模型,见图3。

图3 后鳍轴线几何模型
其中,△BCD为平行于基线面的水平面,△ABD为平行于中站面的竖直面,面BCD与面ACD的夹角为52.7°,直线AC为鳍轴线,∠C′A′D′即为所求夹角∠CAD(设为α)的投影角度。
在△ABD中,∠ABD=90°,∠ADB=52.7°,可求得
在△BCD中,∠BDC=90°,∠CBD=11.5°,可求得

在△ACD中,∠ADC=90°,可知
tan11.5°×cos 52.7°=0.123 29
故:σ=arctan0.114 36=7.03°
用同样的方法可求得前鳍轴线夹角为7.63°。
2.2 求解空间流线角
以左舷后鳍流线角求解为例,根据减摇鳍轴线和流线在三视图的投影关系,建立三维模型,见图4。其中,O为鳍轴中心线与船壳板的交点,以O点为原点,X轴方向为船艏方向,建立坐标系X-Y-Z,将坐标系绕X轴顺时针旋转52.7°,得坐标系X1-Y1-Z1,然后,将坐标系X1-Y1-Z1绕Z1轴顺时针旋转7.03°,得坐标系X′-Y′-Z′,则Y′轴即为鳍轴中心线(根据2.1求得)。在此中心线上取线段OB,OB在中站面的投影为OH,OB在基线面的投影为O′B″,OH在基线面的投影为O′G。
图4 后鳍流线角三维模型
可知:∠BOH=7.03°,∠B″O′G=11.5°。
过B点做垂直于Y′轴的面ABD,在面ABD上做平行于基线面的线段AB,AB在中纵剖面上的投影为A′B′,然后在面ABD上,将AB绕A点逆时针旋转α,得直线AD,AD在中纵剖面上的投影为A′D′,令∠B′A′D′=4.3°,则∠BAD=α即为所求流线角。
将△A′B′D′平移至A点,建立流线角求解的几何模型,见图5。
图5 后鳍流线角几何模型
其中,面ACE为平行于中纵剖面的竖直面,面ABC为平行基线面的水平面,面BCED为平行于中站面的竖直面,做辅助线DF,令DF∥CE,∠CAE即为所求夹角∠BAD(设为α)在中纵剖面上的投影角度。

在△ACE中,∠CAE=4.3°,∠ACE=90°,可求得

∠AEC=∠ACE-∠CAE=85.7°
在△ADE中,∠AED=90°,可求得

△ABC中,∠ACB=90°,∠BAC=∠B″O′G=11.5°,可求得

根据投影定理[3]可知
S□BCED=S△ABD×cosβ+S△ADE×cosδ。
β为面ABD与面BCED的夹角,从鳍座平面旋转的关系可知β=90°-7.03°=82.97°;δ为面ADE与面BCED的夹角,δ=∠AEC=85.7。将β、δ带入上式,可求得x=0.104 5。

用同样的方法可求得前流线角为7.65°。
2.3 鳍轴线偏差及镗孔余量的确定
设A点为鳍轴线上距船壳板距离为50 mm的点,AD为鳍轴线,AB为鳍根部鳍轴线距随边的距离,建立几何模型见图6。
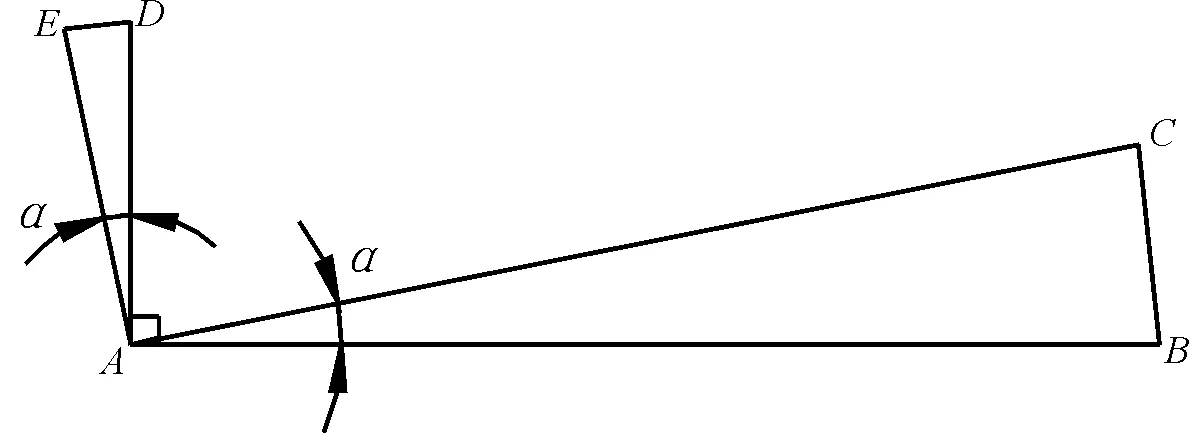
图6 轴线偏差几何模型
故α=arccos0.999 85=1.05°,即鳍轴线的极限偏差为1.05°。


3 减摇鳍的定位与安装
减摇鳍的定位与安装以右舷后减摇鳍为例。
3.1 用全站仪确定鳍轴中心线
1)在右舷后鳍座安装分段的船壳板外缘划出#55、#56理论肋位线,距离基线为1 750 mm的水平线。
2)同时划出1 750 mm水平线与#55肋位线交点A。
3)按确定的A点在船体外板上划出直径1 004 mm开孔圆和直径1 104 mm检验圆。
4)作出过A点距中与船体中心平行的直线S1并勘划在船台上。
5)通过全站仪两点建立船体坐标(坐标原点为轴线与外板交点A,X轴方向为S1方向)。
6)坐标变换首先绕着X轴顺时针旋转52.7°,再绕Z轴顺时针旋转7.03°(7.03°为2.1中所求得的鳍轴空间夹角)。
7)通过不断测量选择坐标系统中坐标为(0,-Y,0)值的一个合适点A′。
8)将点A与点A′连接则为减摇鳍的空间轴线。
3.2 鳍座的定位
将鳍座吊入船体舱内就位,并重拉鳍轴中心线,以此中心线进行左、右、前、后、高、低调整至安装要求,此时应确保鳍座面板的中心十字线水平,然后鳍座绕轴线向上转动6.98°(6.98°为空间流线角),点焊固定后进行鳍座的焊接。
3.3 鳍设备的安装
按常规要求安装执行机构、鳍、液压机组、操纵箱、控制器等并进行调试。
4 结论
1)鳍轴线空间夹角和空间流线角的求解是至关重要的工作,必须确保准确,因为此处的偏差投影后会被放大,直接影响定位精度。
2)如船厂未采用精益造船模式[4],则应考虑船体外板在减摇鳍安装位置处的变形,如变形超出许可范围,应在确定技术参数时给出补偿。
3)如果船台为倾斜船台[5],在使用全站仪时应首先输入船台倾斜角度。
由于将二维参数转化为了实际操作过程中所需要的三维参数,使减摇鳍的安装有了理论数据的支撑,而全站仪的引入,使得这各参数的实际定位精度得以保证,从而确保了减摇鳍装置的安装精度,该项新工艺已成功应用在公司承制的某型船减摇鳍的安装上,实船安装精度高于厂商提供的设备安装精度要求,效果非常理想。
[1] 廖铭声.减摇鳍的水动力学设计基础[J].机电设备,1997(4)17.
[2] 何保喜.全站仪测量技术[M].郑州:黄河水利出版社,2005.
[3] 丘维声.解析几何[M]. 北京:北京大学出版社,2005.
[4] 张明华.精益造船模式的研究[M].北京:中国经济出版社,2005.
[5] 李林忠.船舶建造工艺学[M]. 哈尔滨:哈尔滨工程大学出版社,2006.
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
小型微型计算机系统(2021年12期)2021-12-08
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
消费导刊(2020年21期)2020-06-30
VOGUE服饰与美容(2019年10期)2019-12-02
动漫界·幼教365(小班)(2019年10期)2019-10-28
中学生数理化·高一版(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
福州大学学报(自然科学版)(2016年5期)2016-03-15