
基于声全息声强法的噪声检测研究
2012-02-26 11:48邓长勇
装备制造技术 2012年2期
邓长勇
(重庆广播电视大学,重庆 400052)
声全息是20世纪80年代人们发现了随距离按指数规律衰减的倏逝波后,才迅速发展起来的。随后,许多学者就近场声全息提出了多种算法,通过测量全息面上的复声压和质子的速度,可以重建声源模型,并根据模型来计算出各个点的声学量。模型建立得准确与否,直接和近场声全息的空间变换算法有很大的关系。目前比较成熟的算法,有HELS方法、统计最优法、边界元法等效源法等,但大部分的方法,要求在消声室或者混响室内完成。
近场声全息法,能够在混响室或者背景噪声低的情况下,准确地识别出机动车表面的噪声源。而声强检测,是目前应用较为广泛的一种噪声定位检测方法。利用了声强的矢量特性,检测过程中能够去除环境噪声的影响,不需要在消声室内检测。将声强法不受环境噪声影响的特性,与近场声全息法中处理测试数据的优势相结合,可以最大程度地减少摩托车噪声测试中存在的测试及数据处理误差,准确地反应噪声源的噪声。
1 理论推导
在自由场任何平面上的声压,可以看成无数个空间波数域的平面传播波和倏逝波的叠加[3]。声压根据波域叠加原理,自由声场的声压可以表达为[1]

其中cn独立于声场,但是和其与声源的距离有关,以上关系包括了所有的声场,对于角频函数准k也满足其方程

根据控制误差的最小二乘法原理,可以写成矢量矩阵的形式,上式可以写成如下方程[2]

将上式正则化,求其解为

其中,
AH为矩阵A的共轭转置矩阵;
I为单位矩阵;
(AHA+θ2I)-1为 AHA+θ2I的逆矩阵;
θ为正则化参数,实际起滤波作用。
在该条件下,当给定信噪比SNR后[3],其参数由以下公式来确定

上述矩阵中的m为声波函数的个数,当其趋于无限大的时候,则K数域就接近于连续的区域,所以就更加接近测量面的真实值。即

其中,
准K*为矩阵准K的共轭矩阵。
将式(4)带入式(1),可以得

其中PT=[p(r1)…p(rn)]为包含测量面声压P的转置,空气微粒的振动速度

对其进行Z变换,并根据欧拉公式可以得出

对声压进行空间变换,带入式(9)可以得出

其中,

三维声强I可以得出

将式(7)和式(10)带入式(11)可以得出如下声强的公式

上式即为基于最优化声全息的声强测量公式,当m区域无穷大的时候,即可以得出以下公式

2 实验验证
试验测点的选择,根据GB/T 16404-2005布置,以摩托车的左面作为声源的基准体,网格面和它平行且和地面垂直,对整车实行网格划分,根据车体的长和高,设定为15×10网格,每个小网格高为80 mm,长为100 mm,总共有150个矩形网格组成,然后再把每个小格细均分成4个子网格,采集的顺序为顺时针采集4次为结束。分别在3个速度下(5 100 r/min、5 400 r/min、7 200 r/min)采集噪声数据。
根据全息声强法的推导公式,将测试所得结果导出声压,后用MATLAB做矩阵处理[5]。取n=15,m=4,其中矩阵中的常数为准K(x0,y0,z0)取其值为1。控制信噪比SNR=15 dB,然后通过矩阵运算[9],算出相应的各个系数,然后计算出声强值,再将其声强值导入小野系统自带的声强分析软件,做出声强云图和三维声强图。如图1为转速为5 100 r/min所分析的声强云图。
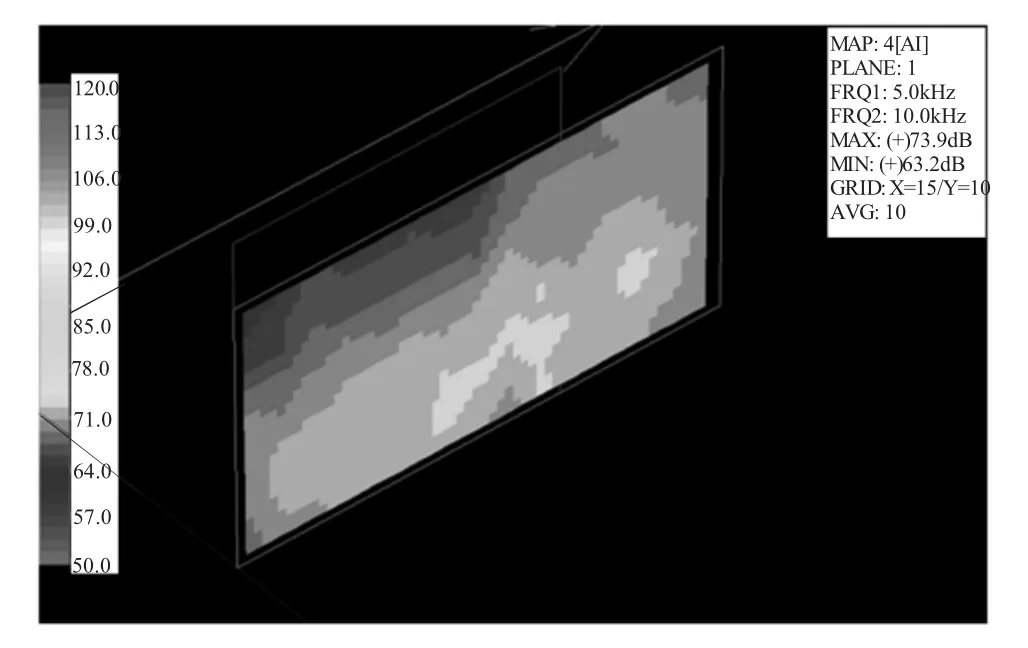
图1 全息声强法5 100 r/min时左面的声强云图
从采用全息声强法的等声强图中可以看出,其最高声强降到了86 dB,接近于在消声室内做的真实值。噪声辐射面积上,发动机辐射噪声成为了第一辐射声源,然后是排气和进气噪声源。此外,在消声器中间支撑点和后拖泥板与发动机中间相连的区域,以及在发动机表面与车架立柱之间的空隙处,出现了两个次级声源。
通过比较可以发现[6],和一般声强测试方法相比,全息声强法得到的测试结果及噪声源定位更加准确,并且能够准确地反映出各个噪声源部分的频率特性。
此外,它克服了近场声全息方法中对测试环境要求高、不能在工况环境下检测的缺点,具有良好的应用性。
3 结束语
研究结果表明,基于全息声强法的摩托车噪声检测方法,具有较好的噪声源检测与识别能力,测试误差小,能够在环境噪声恶劣的工况下,准确识别出摩托车主要噪声源,满足目前企业现场摩托车噪声检测的需求。本方法具有一定的实用价值,为降噪技术提供了前提保证。
[1]Williams E G.Sound Source Reconstruction Usinga Microphone Array[J].JAcoustSocAm,1980,(68):340-344.
[2]P MVanden Berg.Reflection by a Grating:Ravieigh Method[J].Opt.Soc.Am,1981,(71):1224-1229.
[3]Hiroyuki Kuwahara,Yasuski Aiba.Advanced Technology on Noiseand Vibration in Motorcycles[J].SAE,1996.
[5]邱晓林,天 柁.基于MATLAB动态模型与仿真[M].西安:西安交通大学出版社,2003.
[6]王 银.摩托车噪声屏蔽技术的研究与应用[J].小型内燃机与摩托车,2007,(2):107-109.
猜你喜欢
振动与冲击(2022年17期)2022-09-23
电子世界(2022年1期)2022-07-23
压电与声光(2022年3期)2022-07-16
机械设计与制造(2022年4期)2022-04-28
汽车工程(2021年12期)2021-03-08
科学技术创新(2020年19期)2020-07-03
噪声与振动控制(2019年3期)2019-06-25
汽车工程(2018年12期)2019-01-29
科技视界(2018年16期)2018-10-27
汽车实用技术(2018年10期)2018-06-01
