
实验室磁悬浮球系统数学模型的建立
2012-02-26 11:48于建立崔亚君高峰娟
装备制造技术 2012年2期
于建立,崔亚君,高峰娟
(海军航空工程学院青岛分院,山东 青岛 266041)
磁悬浮技术的特点,是利用磁场力将物体悬浮起来,使悬浮体与支撑体之间没有任何机械接触的一种新型技术,其具有无噪声、无磨损、能耗低、寿命长、安全可靠的一系列优点,应用到很多领域,如磁浮列车,航天器与电磁炮的磁悬浮发射、磁浮轴承、磁浮隔振器、磁悬浮飞轮储能等。
磁悬浮球系统由感测器结构、控制器结构、驱动器结构三大结构组合而成。感测器是由光敏电阻来控制电流大小,在初始电压和反馈电压测得其值;而控制器部分,则由运算得来的数值,再加以变化,进而驱动到电磁铁部分,让其对球的吸引力增多或者减少。
磁悬浮球系统的实现是把电磁铁绕组中加入大小一定的电流,这样就会产生一定的电磁力,通过控制电流的大小,来产生与钢球自身的重力相平衡的电磁力,钢球就在空中处于平衡悬浮的状态,但这种平衡状态不稳定。原因是电磁力大小,与钢球和电磁铁之间的相互距离成反比,稍有干扰,钢球就会偏离平衡位置。因此需要监测钢球与电磁铁间的距离y的变化,保证钢球的受力平衡,从而实现稳定闭环悬浮控制系统(如图1)。
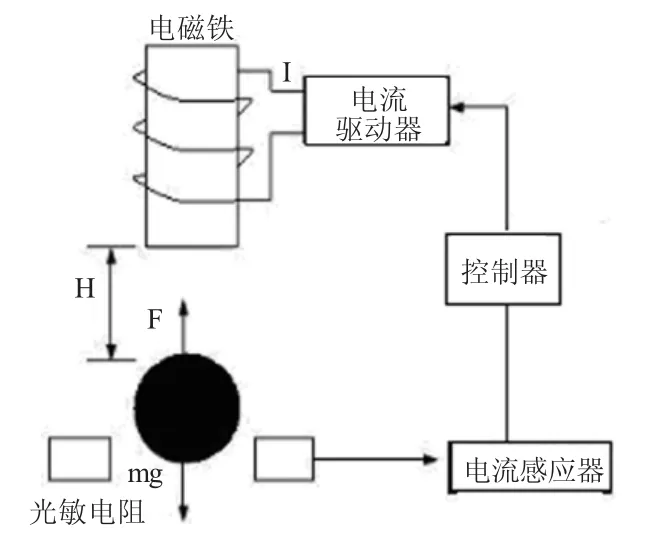
图1 磁悬浮球控制系统功能图
1 磁悬浮小球控制系统受力分析
磁悬浮小球的受力分析如图2所示。
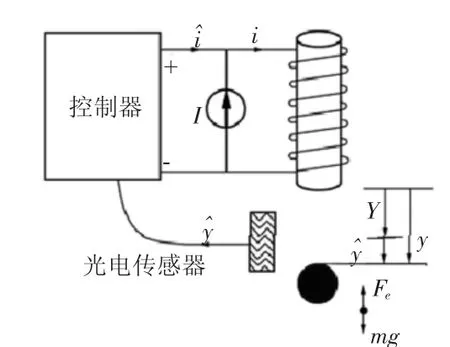
图2 磁悬浮球受力分析图
图中,
规定向下为坐标正方向;
励磁电流i;
电磁铁下端到钢球的距离(平衡位置处)Y;
重力与电磁力相等的电流(平衡位置处)I;
电磁铁下端面到钢球的位移y;
当钢球受到干扰,偏离平衡位置向下运动时,光电传感器感受到小球变化的位置信号,同时把信号反馈给控制器,用来增加励磁电流,使钢球重新回到平衡位置;相反,当钢球受到干扰,偏离平衡位置向上运动时,电流被控制器减小,使钢球保持平衡位置,从而保证钢球动态平衡悬浮。
2 动力学模型的推导
磁悬浮小球所受的电磁力做功,与两个因素有关,就是绕组电流i和小球与电磁铁的距离y,所以,根据电磁场能量方程与做功原理,可得电磁力的计算方程为

其中,
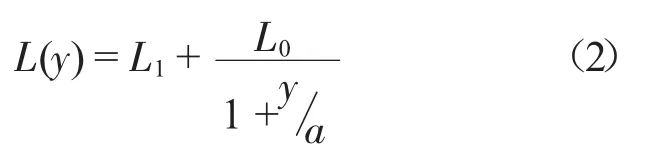
将式(2)代入式(1)得

进一步求偏导得到电磁力Fe的表达式

式中y的含义如图3所示。

图3 小球部分受力图
钢球与电磁铁端面接触时的电感L1+L0;
没有放置钢球时绕组的电感L1;
a为线圈电感为L1+L0/2时钢球到电磁铁的距离。
当电感L=L1+L0/2时,测得钢球距离电磁铁的距离a=4.2 mm。
小球的运动方程,根据牛顿第二定律有

小球平衡时有

假设钢球在平衡位置处时满足

将式(3)代入式(4),则有
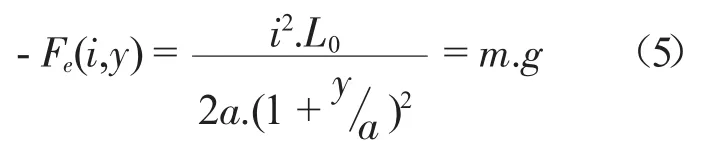
即

通过式(5),可以得出结论:电流 I的大小给定后,钢球到电磁铁下端的距离Y也是定值。
令
将式(5)按泰勒级数展开(在平衡位置处),略去高阶项,式(8)为线性化后的方程
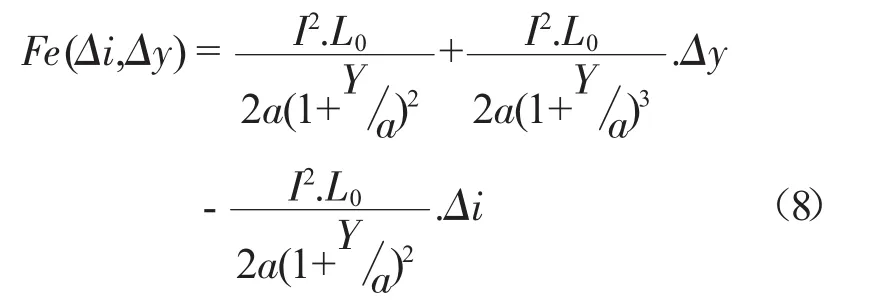
为得到钢球线性化的运动微分方程,将式(6)、式(7)和式(8)代入式(4),

对式(8)两端进行拉氏变换,得

对上式以电流为输入,以小球的位移为输出,这样就得到了小球运动系统的开环传递函数
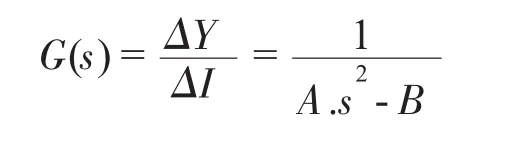
其中

3 相关参数的选取
参考图2磁悬浮球受力分析图,实验室中选取小球的质量m=60 g,平衡位置处 Y=13 mm,平衡时的静态电流,即电磁力与钢球重力相等时的电流,实验室中这些电流可以通过实验测量数值,测量电路图如图4。
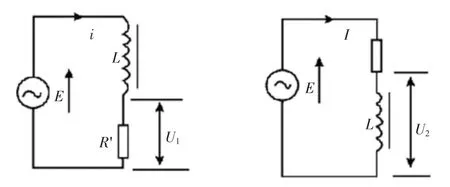
图4 测量绕组电感的测量电路
图4中,E为交流电源,当R'的阻值足够大时,电磁铁绕组的电阻可以忽略,则U1和U2的计算表达式
U1=i R',
U2=ω Li。
经测量得到
L1=123.6 mH,
L0=8.3 mH,,
静态电流I=452 mA.
各个参数具体取值情况如表1所列。
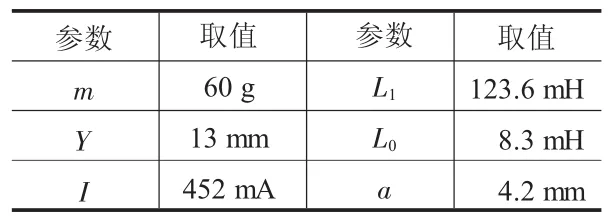
表1 各参数取值情况表
将相关参数取值代入传递函数G(s),就可以得到从线圈电流△i到钢球位置△y的开环传递函数

但开环控制没有自动修正偏差的能力,抗扰动性较差,一般只应用于对精度要求不高的场合,由运动系统的开环传递函数G(s)表达式,可以得到磁悬浮小球系统的开环极点
系统有两个极点,但S2位于右半平面,系统不稳定。钢球不能处于平衡位置悬浮,为保证钢球的平衡悬浮,在系统中引入反馈控制。加入反馈后,磁悬浮小球系统结构如图5。

图5 磁悬浮小球的系统结构图
控制器的闭环传递函数变为

对加入单位反馈后的控制器进利用Simulink进行仿真,在阶跃信号干扰下,示波器输出波形如图6。

图6 加入单位反馈后控制器抗干扰情况
4 结束语
从示波器的输出情况可以看出,在受到干扰情况下,小球仍会偏离平衡位置,但是这个变化是有限度的,逐渐趋于平稳,但不是在原平衡位置处再次稳定,所以说加入单位反馈后,抗干扰能力是有所增强,但仍不能达到理想的控制目标。要想使得小球稳定悬浮于空中,还需要进一步探讨更好的校正方法。
[1]任彦硕.自动控制原理[M].北京:机械工业出版社,2004.
[2]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[3]胡寿松.自动控制原理(第四版)[M].北京:科学出版社,2005.
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
中国特种设备安全(2022年1期)2022-04-26
赤峰学院学报·自然科学版(2021年10期)2021-11-11
防爆电机(2021年5期)2021-11-04
昆钢科技(2021年2期)2021-07-22
哈尔滨轴承(2020年4期)2020-03-17
都市家教·上半月(2017年8期)2017-08-29
中学物理·高中(2016年11期)2016-12-15
哈尔滨理工大学学报(2015年3期)2015-09-21
考试周刊(2015年68期)2015-09-10
