
空中力量体系分布式决策机制研究
2012-03-24 13:04贾子英白靖华
海军航空大学学报 2012年6期
刘 阳,贾子英,白靖华
(1.海军航空工程学院 a.青岛校区,山东 青岛 266041;b.研究生管理大队,山东 烟台 264001; 2.91206 部队,山东 青岛 266104)
空中力量体系是指为达成作战目的,由空空、空地作战和信息支援等装备子系统构成的有机整体,是包含分散配置的众多作战单元的复杂作战系统[1]。分布式决策是体系对抗的必然要求,是空中力量体系对抗的重要方面。现有研究成果大多是针对决策内容、决策流程等问题,缺乏关于分布式决策机制的研究。文献[2]研究了预警机指挥控制多编队飞机空战过程的模型及算法,不能反映分布式决策的特点。文献[3]利用多智能体理论,通过Agent合作机制研究了任务分配过程。文献[4]对某一作战任务,建立了基于市场行为的编队内部任务的动态协调机制。文献[5-6]将编队和单机均视为独立的决策主体,从战术辅助决策的角度研究空战决策,没有考虑编队、单机决策受体系战术的约束问题。
为适应体系对抗的需要,空中力量体系决策以分布式网络化作战[7]为指导,由体系中多个决策节点进行分布式决策,形成最终方案。本文根据空中力量体系分布式决策的特点,从系统的角度分析决策过程中诸多相互影响的因素,构建空中力量体系分布式决策机制。
1 空中力量体系分布式决策
1.1 空中力量体系决策网络
基于复杂网络的观点,空中力量体系可表示为由决策节点、传感器节点、对抗节点构成的作战网络[8],见图1。根据网络中心战理论和节点的类型,作战网络从逻辑上可分为传感器网络、决策网络和对抗网络。空中力量体系中的决策节点是有等级区别的,可分为任务级决策节点、战术级决策节点和行动级决策节点。用☆表示任务级决策节点,如预警机、地面指挥所;△表示战术级决策节点,如侦察群、电子对抗群及火力打击群的决策机构;〇表示行动级决策节点,如双机编队的长机或单机的飞行员。边表示决策节点间的物理、逻辑联系。

图1 空中力量体系决策网络
空中力量体系决策网络NF可表示为:

式(1)中:N是决策节点N1,N2,… ,Ni,… ,Nn的集合,n为节点数量;IN⊆N×linkN是连接N中2 个决策节点的边的集合。
1.2 分布式决策的概念
空中力量体系分布式决策是指各级决策节点对作战行动进行的组织、指挥、控制和协同。在空中力量体系中,决策权限与决策能力随决策节点分布而分散,决策已经不是某个决策者(决策人员、软件)或者决策机构所能单独完成的[9]。分布式决策是指广泛分布配置在信息化战场上的各级决策机构,紧紧围绕鲜明的整体作战意图,通过有效的决策机制实施的“合目的”的决策,使作战单元能够自主协同作战,以便充分发挥各决策机构能力的一种综合性决策活动。分布式决策具有鲜明的整体意图,共同一致的作战规则,流畅有序的决策流程等特点。
空中力量体系分布式决策,在本质上是一种群决策,需满足以下条件[10]:一是空中力量体系中包含需要由多个决策节点共同完成的决策内容;二是空中力量体系中的各决策节点具有彼此协作的愿望;三是为了实现分布式决策,各决策节点共享战场态势信息;四是各决策节点相互之间存在信息交互的途径;五是具有明确的分布式决策机制,即决策程序。空中力量体系包括众多的决策节点,具有统一的作战目标,通过数据链何以实现信息共享和决策协同,具备实施分布式决策的基础。
1.3 空中力量体系分布式决策内容
空中力量体系决策内容包括战术选择、兵力分配、目标分配以及火力分配4 个方面[11]。由于决策节点的层次性,可将空中力量体系决策问题分为任务级决策、战术级决策以及行动级决策3 个层次,如图2 所示。

图2 空中力量体系决策的层次结构图
任务级决策的主体为预警机等任务级决策节点。任务级决策节点根据全局态势,决策空中力量体系对抗所采用的战术,明确各战术编队的编成,即实现战术选择和兵力分配。
战术级决策的主体为战术编队的指挥员等战术级决策节点。战术级决策节点在体系对抗的战术要求下,根据编队态势调整兵力分配方案,并以双机的形式分配所属力量,明确各双机作战目标,实现目标分配。
行动级决策的主体为双机编队长机等行动级决策节点。行动级决策节点根据局部态势调整目标分配方案,进行火力分配,并确定攻击的航线、时机等问题。
空中力量体系决策的内容是相互联系的整体,需要3 个决策层次的主体协同完成。任务级决策节点与战术编队级决策节点共同完成战术选择、兵力分配;战术编队级决策节点与行动级决策节点共同完成目标分配、火力分配。此外,对某些重要问题,任务级决策主体可以直接与行动级决策主体相互联系。
2 空中力量体系分布式决策机制
2.1 分布式决策机制
空中力量体系中不同层次的决策节点、同层次的不同决策节点对战场态势可能有不同的判断,进而行动方案或产生分歧。为了消除分歧,实现统一协同的作战行动,需要建立一套系统的分布式决策机制。协商是群体成员互相听取意见并相互妥协的过程,表现在协商过程中各成员的思想观点相互影响和得到调整,最终形成一致的方案[10]。采用协商机制,构建空中力量体系分布式决策机制,见图3。

图3 空中力量体系分布式决策机制
为了说明分布式决策机制中确定协商对象、协商以及一致方案判断等环节,令决策节点i在k次协商后对某议题的方案为zi(k) ∈[0,1],定义以下概念。
1)协商轮次:每个决策节点与所有相关决策节点进行一次协商,称为一个协商轮次[12]。
2)方案包容度:决策节点i对j的方案包容度dij是指i可与j协商的方案差异阈值。dij的值越大,包容程度越大。如果满足,则i可以与j进行协商。根据方案包容度,可以确定协商对象。可与节点i协商的节点集Di为

式中,L(N)(i,j) = 1表示第i个节点与第j个节点有边连接。
3)方案接受度:决策节点i对j的方案接受度uij为节点i接受节点j的方案的程度。当i与j协商时,如果它们的方案差异大于方案包容度dij,那么i维持自己原来的方案;反之则妥协。决策节点之间的协商包括2 种形式:一是双边协商,即2 个决策节点之间的协商;二是网络协商,即多个决策节点之间的协商。双边协商后第i个决策节点的方案zi(k+ 1)为

根据式(2)、(3),网络协商后zi(k+ 1)为

式中,|Dj|为Dj中决策节点的个数。
4)方案分散度:方案分散度kθ用来衡量空中力量体系中各决策节点的方案一致程度。经过k次协商后空中力量体系的方案分散度为
式中:n为决策节点的个数; <z(k)>是k次协商后决策节点方案的平均值;zi(0)为初始方案。方案分散度θk是单调减小的,θk越小,方案越统一。
2.2 分布式决策机制运行流程
分布式决策机制的运行流程,是各决策节点通过协商达成一致方案的过程。空中力量体系分布式决策机制运行流程如图4 所示。
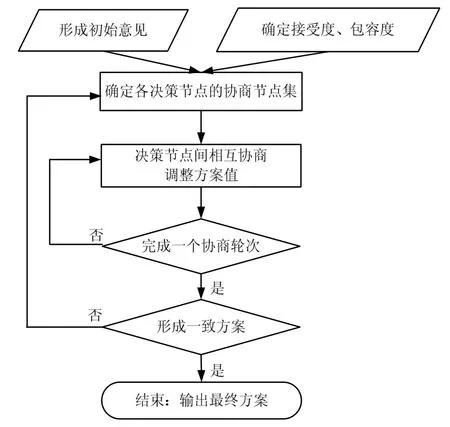
图4 分布式决策机制运行流程图
分布式决策机制运行流程分为以下步骤:
2)确定各决策节点的协商规则,包括方案接受度u和方案包容度d。
3)确定决策节点i可以沟通的节点集iD。在满足方案包容度的前提下,认为节点之间只要有边连接,就进行协商。
4)各决策节点进行协商,调整方案,完成一个协商轮次。
5)假定方案分散度小于ε时,空中力量体系达成一致方案。根据式(4),判断是否形成一致方案。若没有形成一致方案,则回到步骤4),继续下一个协商轮次;否则结束协商。
6)得到最终方案 <z(k)>。
3 实例分析
假定某空中力量体系的决策网络为图1,任务级决策节点1 为预警机,是空中指挥所;战术级决策节点2 为侦察群的指挥员;节点3 为电子对抗群的指挥员;节点4 为火力打击群的指挥员;行动级决策节点5、6 为侦察机的飞行员;节点7、8、9为歼击机双机编队的长机;节点10 为电子对抗编队的长机。当发现敌空袭征候时,空中力量体系根据空中态势,进行分布式决策。
各决策节点的初始方案zi( 0)是不同的,dij、uij也是不同的。假定各决策节点的初始方案为0~1之间的随机数,每个决策节点对其他节点的方案包容度和接受度是定值,令战术级决策节点的方案包容度和接受度为0.1、0.2,任务级节点的方案包容度和接受度分别为0.35、0.3,行动级节点的方案包容度和接受度为0.5、0.6,当方案分散度小于0.05时认为形成了一致方案。利用Matlab 仿真,经过6个协商轮次,得到最终方案为0.637 8,见图5。

图5 决策节点方案值变化曲线
在实际的决策过程中,各决策节点的初始方案差异是不大的。若初始方案zi( 0)为0.7~0.9 之间的随机数,则经过2~3 个协商轮次,即可得到一致的最终方案。
在以上的实例分析过程中,对决策节点的方案包容度和接受度进行了简化。方案包容度和接受度应为第i个决策节点对第j个决策节点的ijd、iju,仿真没有体现同级决策节点的方案包容度、接受度的差别。
通过分析得到如下结论:决策节点的意见包容度d的大小决定分布式决策能否达成一致的意见,包容度越大,最终形成的方案越集中,反之越分散。方案接受度u的大小决定形成一致方案所需要的时间,接受度越大,所需时间越短。
4 结束语
研究分布式决策机制,是满足空中力量体系作战决策发展的需要。在分析空中力量体系分布式决策网络、概念及内容的基础上,构建了基于协商的分布式决策机制,通过仿真进行实例分析。本文构建的分布式决策机制从系统的角度,综合考虑影响决策的多种因素,体现了空中力量体系作战决策的特点。仿真结果表明,该机制能够快速地得到一致的决策方案,具有可行性和有效性。
[1] 徐浩军, 郭辉, 刘凌, 等. 空中力量体系对抗数学建模与效能评估[M]. 北京: 国防工业出版社, 2010:2-3.
[2] 蔡佳, 罗继勋, 胡朝晖, 等. 预警机指挥控制系统在编队飞机空战中的算法研究[J]. 电光与控制, 2010, 17(6):28-31.
[3] 欧建军, 钟麟. 基于多智能体的编队协同空战战术规划[J]. 电光与控制, 2010,17(2):35-38.
[4] 徐安, 赵思宏, 寇英信. 协同空战中基于任务分解的任务协调机制研究[J]. 电光与控制, 2010,17(2):21- 25.
[5] 孙德建, 李为民. 战术空战智能决策支持系统框架研究[J]. 空军军事学术, 2009(1):41-44.
[6] 丁全心. 现代空战中的战术辅助决策技术[J]. 电光与控制, 2009,16(12):1-4.
[7] JEFF CARES. Distributed networked operations-the foundations of network centric warfare[M]. 于全, 译. 北京: 北京邮电大学出版社, 2006:8-9.
[8] 宋启勋, 廖兴禾, 刘文博. 分布式网络化作战理论特征探析[J]. 四川兵工学报, 2009,30(9):104-106.
[9] 付国宾, 谭海涛, 朱巍, 等. 基于效果的网络中心战模型研究[J]. 火力与指挥控制, 2009,34(6):1-6.
[10] 刘明广. 复杂群决策系统决策与协同优化[M]. 北京:人民出版社, 2009:6-7, 23-24.
[11] 孙体忠, 孙金标. 空战战术双层决策模型[J]. 电光与控制, 2011,18(4):37-40.
[12] 鲍鲜鲲. 基于复杂网络的作战同步建模与分析[D].长沙: 国防科技大学, 2009.
猜你喜欢
中央社会主义学院学报(2022年3期)2022-09-17
小学科学(学生版)(2021年10期)2021-12-28
北京航空航天大学学报(2017年3期)2017-11-23
无人机(2017年10期)2017-07-06
北京航空航天大学学报(2017年10期)2017-04-20
宠物世界·猫迷(2016年3期)2016-04-23
轻兵器(2015年21期)2015-09-10
海军航空大学学报(2015年4期)2015-02-27
党的生活(黑龙江)(2014年12期)2014-12-15
导航定位与授时(2014年2期)2014-04-27
