
基于变量泵和喷嘴数的无级变速涡轮发动机
2012-05-28 01:57赵宽明杨赪石钱志博朱允进
水下无人系统学报 2012年3期
赵宽明, 杨赪石, 罗 凯, 钱志博, 朱允进
基于变量泵和喷嘴数的无级变速涡轮发动机
赵宽明1,2, 杨赪石2, 罗 凯1, 钱志博1, 朱允进3
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 中国船舶重工集团第705研究所, 陕西 西安, 710075; 3. 西安船舶工程研究院有限公司, 陕西 西安, 710077)
由于基于流量的单变量控制涡轮发动机动力系统运行经济性较差, 提出了基于喷嘴数开环控制和变量燃料泵流量闭环控制的方法, 进而实现涡轮发动机的无级变速。闭环控制采用改进的自适应算法, 使得双变量控制方法简单实用, 适用于无级变速反舰兼反潜的重型水下航行器, 提高了系统运行效率和平稳性。仿真结果表明, 水下航行器涡轮机动力系统采用喷嘴数开环调节和变量燃料泵流量闭环调节的双变量方式, 系统的压力波动和转速波动小, 同时较采用单一流量调节的系统燃料秒耗量降低了28%, 涡轮叶片前的温度也可降低约230 K。
水下航行器; 涡轮发动机; 推进剂流量; 喷嘴数目; 自适应控制
0 引言
未来海战对水下热动力推进系统提出了越来越高的期望, 即远航程、大航深、变速范围大、低噪声等。同时, 为了提高命中概率和破坏威力, 制导规律已从传统的以命中目标为目的发展到以垂直命中为目的, 如果能具备无级变速能力, 则可以有效地支持新型制导规律的实现。
水下航行器采用无级变速航行时, 先以低速航行, 在确保有效捕捉目标的前期下提高航速, 一旦目标丢失则自动转为低速搜索。采用无级变速, 一方面可使鱼雷搜索和攻击弹道更加合理, 提高自导的作用距离, 实现可靠跟踪, 使鱼雷对目标的攻击更加有效; 另一方面有利于提高能源利用率, 增加航程。由此可见, 研制无级变速推进系统直接关系到鱼雷性能的提升。
电动力的无级变速相对于热动力实现较为方便, 但又存在航程不足的缺陷[1]。热动力采用涡轮发动机作为推进主机是目前的发展趋势[2],但开发大功率、大航深的涡轮机技术难度很大, 主要是由于要满足航行器大范围变速(30~70 kn)和变深(5~900 m)的弹道要求。水下涡轮机通常采用低耗气量、大焓降的小型涡轮机, 且要求涡轮机满足功率大、体积小、重量轻、结构简单等要求。同时由于涡轮机在变动工况时, 特别是在变深时, 对背压的敏感程度远远超过活塞机系统, 采用传统的仅靠燃料流量的单变量控制方式很难满足水下航行器大部分时间运行在非设计工况的经济性要求, 因此开展新型适用于涡轮发动机系统的无级变速控制方案的研究势在必行[3]。
本文以反舰兼顾反潜的重型水下航行器为背景, 提出涡轮机无级变速的构想, 并建立适用于涡轮机动力系统的双变量数学模型, 即通过改变开环工作喷嘴数目和闭环控制变量燃料泵排量的双变量控制方法, 对系统进行了仿真计算。仿真结果表明, 与采用燃料流量的单一变量控制方法相比, 动力系统燃料耗量降低约28% (低速和中速、400 m航深工况), 涡轮叶片前的温度可降低约230K(低速和中速、航深400 m工况), 整个动力系统运行平稳。
1 水下涡轮机无级变速动力推进系统
水下涡轮机无级变速动力推进系统原理如图1所示。系统主要由变量燃料泵、喷嘴盒、燃烧室、涡轮机、泵喷推进器、传感器、发动机控制器单元等部分组成。
燃料在外部海水压力下从燃料舱进入变量燃料泵, 经变量燃料泵按照航速和航深调节并增压, 增压后的燃料经喷嘴盒进入燃烧室雾化燃烧, 产生高温高压燃气, 驱动涡轮盘做功。涡轮盘通过行星减速器驱动泵喷推进器, 将涡轮机的旋转运动转换为水下航行器的向前运动, 使航行器达到指定航速。涡轮机做功后的乏气须经推进轴内孔的排气阀排出雷体。该系统属于开式循环, 受海水背压影响很大。
本文介绍的涡轮机动力系统在结构上采用改变燃料流量和喷嘴数量的双环调节方式, 用变量燃料泵的泵后压力与燃烧室的设定压力进行比较, 将其差值作为指令信号, 构成燃烧室压力的闭环调节器子系统。同时, 整个系统采用转速闭环控制, 控制系统的反馈信号采用与发动机转速恒定速比的中频发电机的频率。变速过程根据制导系统的指令, 通过信息处理器将雷体的相关信息和自动驾驶仪进行处理, 通过发动机控制单元发给转速控制器的变速编码指令实施, 发动机控制单元根据上位机给定的变速指令和中频发电机反馈的转速信号确定相应的控制信号, 同时将计算的燃料耗量传给自动驾驶仪的信息处理器, 以便优化弹道。变量燃料泵根据所接收的控制信号, 调节燃料泵的斜盘倾角, 进而调节进入燃烧室的燃料流量。
采用此种系统配置, 无论水下航行器运行于何种航速和航深下, 燃烧室的压强变化都不会很大, 喷嘴速度因数、可用理想焓降、系统内效率的相对变化都较小, 经济性指标满足系统要求。同时涡轮前温度较低, 使涡轮机叶片、涡轮盘的选材相对较易, 有利于降低涡轮机的设计难度。

图1 无级变速动力推进系统原理图
2 系统建模
在对水下航行涡轮机进行系统建模时, 应考虑喷嘴损失、工作叶片损失、余速损失、轮盘摩擦与部分进气叶片鼓风损失、乏气损失、间隙漏气损失和机械损失等实际系统存在的各种损失, 随着航速、航深等大范围的变动, 这些损失的变动范围也可能较大[4]。在建模中采用的方法是: 充分考虑以上各种损失在不同工况下对涡轮机内效率的影响, 轮周功率为理想可用焓降、效率以及燃料流量的乘积, 轮周转功率除以对应的反馈转速即可得到涡轮机的输出转矩, 由于喷嘴在任何 工况下总是处于临界状态, 燃料流量由燃烧室内的气体状态和喷嘴喉部截面积确定。
以水下航行器的纵平面作为参考系, 开式循环涡轮机动力推进系统的数学模型主要由水下航行器运动学与动力学方程、变量燃料泵排量方程、燃烧室压力方程、喷喉面积以及涡轮机动力系统动力学方程等7个方程构成。




3 控制策略
现代高性能重型反舰兼反潜航行器要求热动力系统具有很大的航速、航深变动范围, 因此涡轮机系统的控制与活塞式发动机一样, 同样体现在系统变速和变深两个方面。但涡轮机系统又与活塞机系统有不同之处, 主要是变深及变速对发动机内效率的影响不同。涡轮机系统变速过程中, 速度比的变化会影响涡轮机的内效率; 而在系统变深时, 排气压强的变化会影响系统的可用焓降, 喷嘴的速度因数也将发生改变, 进而使得喷嘴出口速度随之变化, 造成速度比改变, 同样会影响内效率。涡轮机系统在结构上允许采用更多的控制点, 除可采用活塞式发动机那样的仅靠燃料流量的调节方式, 也可采用流量和工作喷嘴数均可调整的双变量调节方式。但喷嘴数的调节就是喷嘴喉部截面积的量值发生不连续的、阶梯形的变化, 因此喷嘴数调节呈阶跃性。
涡轮机动力系统通常是按照高速、大深度的工况进行设计的, 对于仅采用流量调节方式的系统, 在低速航行时, 由于喷嘴通流部分的几何尺寸不变, 燃烧室压力会随涡轮盘的转速下降而大幅度降低, 并且可用理想焓降也将大幅度降低, 使得涡轮机的内效率和输出功率大幅度降低; 另外当航行器在大深度、低速工况航行时, 由于航行深度的变化引起背压的变化, 从而使喷嘴后压强发生变化。由于喷嘴数不进行调整, 因此压强比大幅度上升, 且燃料流量不变, 造成燃烧室的燃烧温度基本不变, 其结果是涡轮前温升高。这就要求涡轮叶片的材料应具有更好的热力性能, 给设计带来更大的局限性。因此, 采用单一的燃料流量调节方式无法使涡轮机满足较大范围的变速和变深要求, 但这种控制方式可以适用于反舰水下航行器。
水下航行器的低速航行可以通过改变工质秒耗量实现, 为保证工质的初始压力和温度基本不变, 就不能改变燃料供应系统, 同时涡轮机喷嘴喉部总面积也要进行改变。喉部总面积的改变可以通过改变喷嘴数量的办法实现, 燃料流量的改变可以通过改变燃料泵排量的方法实现。从涡轮机动力系统运行经济性和系统实现的可能性出发, 将变量燃料泵后压力作为反馈信号, 设定燃烧室压力, 其差值作为指令信号, 构成燃烧室压力的闭环调节器子系统; 而使用系统转速作为反馈信号, 上位机指令转速作为指令信号, 构成系统转速的闭环伺服器子系统。采用燃料流量和喷嘴数目双变量调节方式的涡轮发动机, 无论系统运行于任何航速和航深工况下, 燃烧室压强的变化都不会很大, 喷嘴速度因数、可用理想焓降、内效率的变化都相对较小, 可以降低动力系统的工质秒耗量, 同时涡轮叶片可以在较大的范围选材, 进而提高涡轮机系统实现的可行性。
当然, 采用双变量调节方式的涡轮机系统在推进剂携带量相同的条件下航程较长, 工况适用范围更大, 但是由于喷嘴数目的调节是非连续的, 只能跳跃性地进行, 当设计中遇到喷嘴数目为非整数时, 必须优化喷嘴个数。另外, 为了实现双参数涡轮机系统平稳性, 需对喷嘴数目进行修正, 即针对某一速制配合固定的工作喷嘴数目 (采用这种控制方式, 会增加燃料的消耗量), 并采用设定转速作为指令信号的开环控制, 这样可以有效减轻由于喷嘴数目变动而带来的系统不稳定。
4 控制模型
涡轮机双变量控制系统由调节喷嘴数目的开环控制子系统和调节变量燃料泵流量的闭环控制子系统构成。
在喷嘴数开环子系统中, 以转速为指令信号, 预设喷嘴数表格, 针对不同的转速设定对应的工作喷嘴数目。但变速时, 每隔一个采样周期变动一组喷嘴数目, 直至满足喷嘴数目的要求; 当变深时, 喷嘴数目不变。
在流量闭环子系统中,, [o8] 故采用自适应控制算法, 以获得较为理想的控制效果, 自适应算法相对简单, 在工程上容易实现。
涡轮机双变量控制系统的开环传递函数

按照该传递函数构造的自适应控制器, 可以确保系统所有参数的全局有界性, 并实现跟随参考模型输出的目的。但由于控制器算法包含了过多的控制参数, 很难实现控制器参数的优选和整定。
水下航行器及涡轮机自身的物理特性可以简化系统模型。当斜盘角度一定时, 燃料泵输出的流量与转速呈正比, 即发动机的转速升高(或下降)将导致燃料流量的升高(或下降), 形成正反馈环节。由于涡轮机系统自身对于变量燃料泵排量的响应是开环稳定的, 这样就可以采用简单的经典控制算法实现对涡轮机理想模型的跟踪, 大大简化系统模型。考虑到燃烧室压力对变量燃料泵排量和喷嘴数目变动的响应非常快, 因此可以采用合理选取参考模型的形式和参数, 获得较好的输出响应。
该简化参考模型为惯性环节, 其传递函数为
采用PI控制算法实现对理想参考模型输出的跟踪
联立式(9)和式(10)得到控制器输出的变量燃料泵控泵参数
进而联立式(8), 得到双参数涡轮机系统的闭环传递函数


5 仿真结果及分析
用已建立的系统模型和控制算法对基于变量泵和喷嘴数的无级变速涡轮发动机进行仿真计算。图2为采用固定喷嘴数仅改变变量燃料泵流量的单参数调节方式, 图中曲线为水下航行器在恒深、变速(减速再加速)情况下, 对各状态变量的过渡过程, 数字1, 2, 3分别代表燃烧室压力、流过喷嘴的流量和涡轮前温度。图3和图4为水下航行器在喷嘴数目开环调节、变量燃料泵排量转速闭环调节的双参数控制下, 动力系统加速和减速时, 燃烧室压力和涡轮机转速的变化过程, 图中曲线1, 2分别为燃烧室压力和系统转速。从图中可以看出, 在燃料流量和喷嘴数调节同步进行时, 系统的压力和转速变化平稳, 超调。
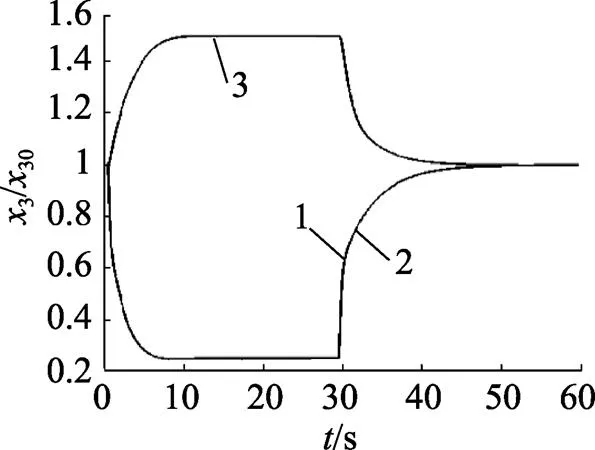
图2 喷嘴数目为12时归一化状态变量图
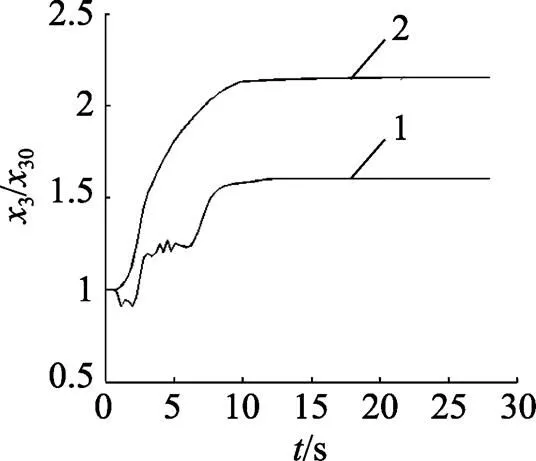
图3 低速变高速时归一化状态变量图
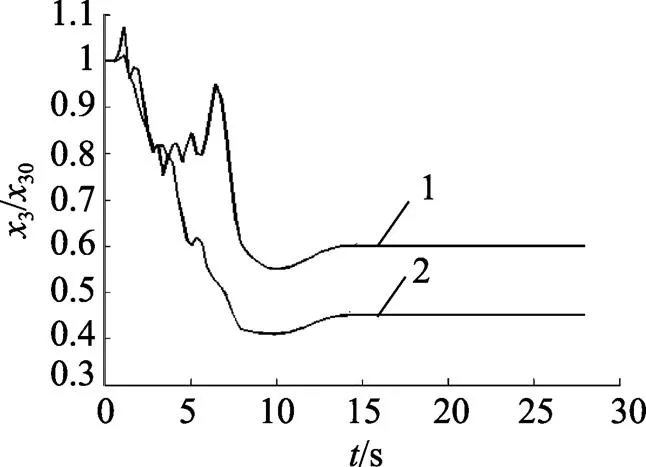
图4 高速变低速时归一化状态变量
图5和图6描述了针对单一流量调节和双变量调节2种控制模式, 航行器在不同航深下在低速和中速时工质秒耗量对比。图中曲线1, 2分别为单一流量调节和双变量调节下燃料秒耗量。由图可知, 采用双变量调节控制模式的经济性高于单一流量调节。
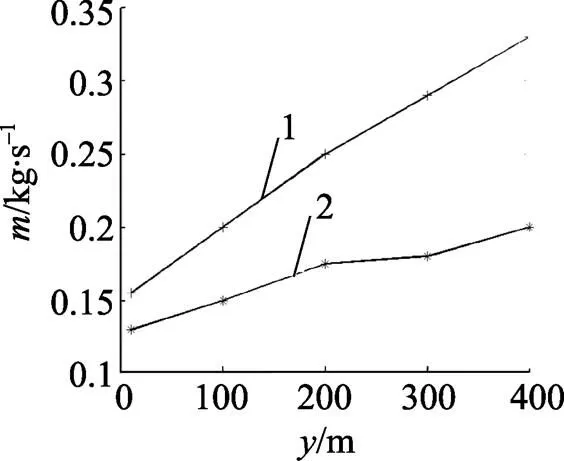
图5 低速时工质秒耗量对比

图6 中速时工质秒耗量对比
6 结束语
从仿真结果可以看出, 水下航行器涡轮机动力系统采用喷嘴数开环调节和变量燃料泵流量闭环调节的双变量方式, 系统压力波动和转速波动小, 运行会更加平稳, 同时较采用单一流量调节的系统具有更低的燃料秒耗量, 对于水下航行器实现远航程以及无级变速具有一定的指导意义。
[1] 李宏, 徐德民, 李治典, 等. 电动力鱼雷驱动电机无级调速技术实现途径[J]. 鱼雷技术, 2003, 11(2):29-32. Li Hong, Xu De-min, Li Zhi-dian, et al. Technical Ways of Realizing Stepless Speed Regulation by Propulsion Motor of Electric Torpedo[J]. Torpedo Technology, 2003, 11(2):29-32.
[2] 赵寅生, 鱼雷涡轮机原理[M]. 西安: 西北工业大学出版社, 1995, 128-158.
[3] 赵宽明, 杨赪石, 孙开锋, 等. 基于变量燃料泵的无级变速活塞发动机性能研究[J]. 鱼雷技术, 2008, 16(5):51-54. Zhao Kuan-ming, Yang Cheng-shi, Sun Kai-feng, et al. Per- formance of Stepless-Speed Swashplate Piston Engine with Variable Fuel Pump[J]. Torpedo Technology, 2008, 16(5): 51-54.
[4] 罗凯, 党建军, 王育才. 水下热动力推进系统自动控制[M]. 西安: 西北工业大学出版社, 2005: 230-252.
Stepless Speed Turbine System Based on Variable Flow Pump and Nozzles
ZHAO Kuan-ming1,2, YANG Cheng-shi2, LU Kai1, QIAN Zhi-bo1, ZHU Yun-jin3
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China; 3. Xi′an Marine Equipment Engineering Research Academy, Xi′an 710077, China)
For the low energy transformation efficiency of the turbine system controlled by single variable flow rate, a bi-variable control method combining open-loop control of working nozzle number and closed-loop control of variable flow rate of fuel pump is proposed to realize stepless speed control of turbine engine. An improved adaptive control algorithm is used for the closed-loop control. This bi-variable control method is simple and suitable for anti-ship and anti-submarine autonomous underwater vehicles, and can make the turbine system work with high efficiency and stability. Simulation result indicates that the turbine system with the bi-variable control achieves lower fluctuation in both pressure and speed, and obtains a 28% reduction in fuel consumption of the system and a 230 K decrease in temperature of foreside of turbine vane, compared with the turbine system with single variable control.
autonomous underwater vehicle; turbine engine; flow of propellant; nozzle number; adaptive control
TJ630.34
A
1673-1948(2012)03-0210-05
2011-07-15;
2011-11-24.
赵宽明(1966-), 男, 高级工程师, 在读博士, 研究方向为热动力推进系统控制与仿真.
(责任编辑: 陈 曦)
猜你喜欢
环球时报(2022-07-27)2022-07-27
当代化工(2020年5期)2020-08-25
汽车维修与保养(2019年7期)2020-01-06
电子制作(2019年19期)2019-11-23
海峡摄影时报(2017年7期)2017-07-14
北京航空航天大学学报(2016年6期)2016-11-16
汽车维护与修理(2015年6期)2015-02-28
燃气轮机技术(2014年4期)2014-04-16
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2014年3期)2014-02-27
