
基于Labview的图像测量技术标定方法
2012-10-16 08:13黄立景王宇浩
科技传播 2012年22期
黄立景,王宇浩
1.西门子(中国)有限公司,北京 100102
2.北京科技大学自动化学院,北京 100083
0 引言
近年来,随着CCD感光元件分辨率的提升以及价格的降低,图像测量技术已经广泛应用在各行业产品几何尺寸的测量上面。所谓图像测量技术,就是利用光电成像系统来采集产品的图像,将图像传输至计算机进行数字图像处理,再根据图像中目标区域的特征用相应的算法进行测量并得出结果。依托于计算机快速的计算能力,可以大大降低现场工人的工作量,提高生产的自动化程度。
利用图像测量技术测量物体几何尺寸时,由于光学镜头固有的缺陷,会使采集的图像存在非线性的几何畸变,对测量精度产生很大的影响。必须对系统进行标定以消除误差。标定实际是确定相机内外参数的一个过程。相机内部参数包括焦距和畸变系数,外部参数包括相机坐标系和世界坐标系之间的对应关系。传统的标定方法很多,如Tsai两步法,Weng迭代法,张正友双平面法等,应用较为广泛,但实际的标定过程比较繁琐。本文介绍基于Labview开发平台下vision组件的标定方法,能很好的解决这些问题。
1 关于Labview开发平台及vision组件
Labview(Laboratory Virtual Instrument Engineering Workbench)是一种程序的开发环境,由美国国家仪器(NI)公司研制。使用图像化编程语言G语言编写程序,是目前功能最强大,应用最广泛的图像化软件开发环境。Lavbiew不仅仅是一种编程工具,而是一种高度集成化的开发平台。从虚拟仪器、测量自动化到高精高速实时控制,再到嵌入式开发,其集成的组件囊括了各个领域的功能。Vision是Labview平台下机器视觉开发的组件,包括三个部分。NI Vision Builder for Automated Inspection是快速化的机器视觉开发组件,操作简便,甚至不用编程就能完成开发。Vision Development Module是视觉组件,为Labview开发平台提供图像处理的各种功能。NI Vision Acquisition Software是图像采集驱动包,可兼容市面上各种接口的相机。
2 基于Labview的标定
Labview平台下对相机进行标定的过程与传统方法有很大的不同,传统的标定方法标定过程很繁琐,需要已知所采集的图像中足够多的点在真实世界坐标系中的精确坐标,通过对这些点的计算得到图像中每个像素代表的实际距离以及消除畸变造成的画面扭曲所带来的影响,由于点在世界坐标系中坐标的精确程度直接影响到最后的标定结果,而获得精确的坐标又十分困难,所以标定过程难度非常大。Labview平台下的标定方法则不同,用一块标准的标定模版来提供标定所需的信息,由于标定模板中点的相对位置都是已知的,且精度很高,只需在工作平面采集标定模板的图像,通过Labview软件优化的算法,就可以得到世界坐标系中足够多的精确点坐标,大大降低了标定的难度,且能够保证很高的精度。
2.1 标定模版
为校正畸变对图像造成的影响,在Labview平台下的标定过程中采用具有明显特征及对应关系的点阵标定板,标定板如下图所示,其中每个黑色圆点的半径以及相邻圆点圆心间的距离都是恒定的。Labview通过利用Canny滤波器可以提取出标定模板中每个黑色圆点的边缘,再利用边缘进行圆拟合,得到每个黑色圆点精确的圆心位置,保证了坐标的精度。
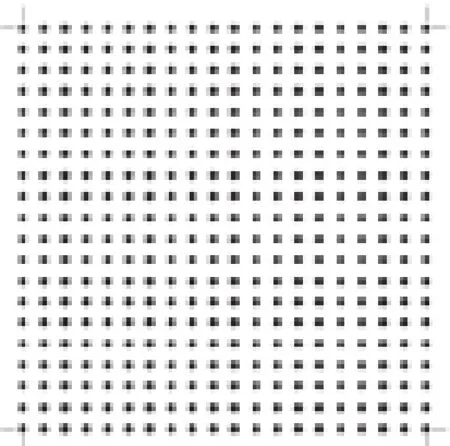
图1 黑色圆点标定模版
Labview中提供了标准的标定模版文件,其位置为开始菜单→所有程序→National Instruments→Vision→Documentation→NI Vision→CalibrationGrid.pdf。该模版中黑色圆点的半径为2mm,相邻圆点圆心间的距离为1cm。
2.2 标定过程
在安装了Labview最新版本机器视觉组件即Vision Development Module 2012和NI Vision Builder for Automated Inspection 2012后,相对于老版本,增加了独立的标定程序Calibration Training,能够更加便捷的完成标定工作,结果保存为png格式文件,且功能得到了很大的增强。
为实现精确测量,要充分考虑非线性径向畸变的影响,需选择Distorition Model(Grid),此模式在矫正非线性畸变的同时对线性畸变也同样矫正,即相机与工作平面不垂直不会影响测量结果。具体的操作过程如下:
1)载入采集的标定模版图像,图像中应将标定模版水平放置于工作平面;
2)采用RGB、HSL、HSV、HIS中的一种方法,通过调节参数来对图像进行阈值分割,使黑色圆点从背景中显现出来。若标定模版没有完全覆盖视场,还需手动划定出标定模版的范围,只有在模版覆盖的区域可以保证测量精度。最后定义识别的点大小范围以及圆度范围以防止图像中细微噪点被错误识别为标定圆点;
3)输入标定模版的相关信息,包括X Spacing,Y Spacing和Unit,分别代表X方向上相邻两个圆点圆心间的距离,Y方向上相邻两个圆点圆心间的距离和距离的单位;
4)系统将对模版进行学习,需要手动选定计算方法,同时考虑三个畸变系数以及切向畸变将提高标定精度,同时也会降低计算速度,应根据实际需求进行选择;
5)为标定图像设定坐标系,以便在后续测量中得出点的精确坐标值;
6)最后将标定好的结果保存为png格式文件,在测量时进行调用。
2.3 标定信息的调用
标定信息包含在之前存储好的png格式文件中,用Labview中Vision assistant节点可以进行调用。将需要处理图像的Image Out输出端接到Vision assistant节点的Image In输入端,节点内用Image Calibration功能调用之前存储好的png格式的标定文件,Image Out端接后续的处理节点。经过此节点后,图像显示并没有发生变化,但标定工作已完成。之后的测量将直接得出实际结果,单位为标定过程中所设置的Unit。需要注意的是标定时用的图像和用于测量的图像必须有相同的类型和分辨率,只要相机与工作平面的相对位置不变就不必重复标定。
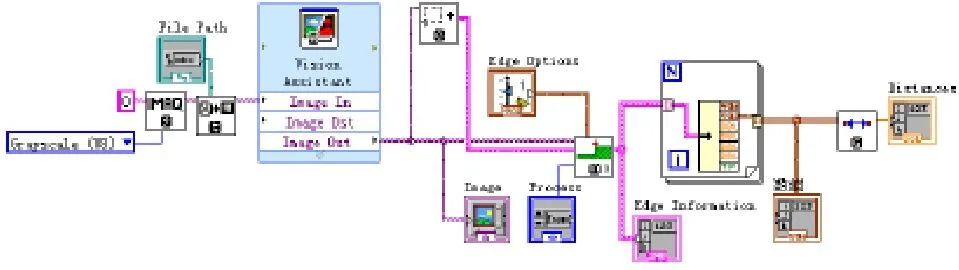
图2 标定信息的实际调用
3 标定结果
通过实际的测量,可以验证基于Labview最新版机器视觉组件的标定方法确实可行,操作简单,能取得不错的结果。

图3 标定前的工作平面图像
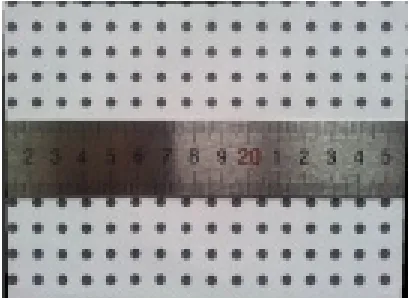
图4 标定后修正好的图像
本实验中相机使用的镜头为广角镜头,畸变率较大。从图中可以看到出现了明显的筒形畸变,通过Labview软件的标定,很好的修正了畸变给图像带来的影响。实际的测量结果也同样让人满意,能达到不错的精度。测量的物体选定为钢板尺2cm至9cm处,每隔1cm进行一次测量。

表1 实际测量结果
由于实验条件所限,如能提高标定模板的制作精度、工作表面平整度,则可以得到更好的测量效果。
4 结论
基于Labview的标定方法可以很有效的消除图像中线性与非线性的畸变,操作简单,测量精度高,且能够与Labview机器视觉组件的图像处理,图像测量功能形成完美的结合,是传统方法无法相比的,对实际生产有很重大的意义。应用在机械零件等产品的测量中,可以大大提高生产效率,节约人力成本,进一步提高自动化程度。
[1]Carsten Steger,Markus Ulrich,Christian Wiedemann.机器视觉算法与应用[M].北京:清华大学出版社,2008.
[2]陈树学,刘萱.Labview宝典[M].北京:电子工业出版社,2011.
[3]马颂德,张正友.计算机视觉[M].北京:科学出版社,1998.
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
数学小灵通·3-4年级(2019年11期)2019-11-26
小猕猴智力画刊(2019年10期)2019-11-23
小猕猴智力画刊(2019年12期)2019-01-08
摄影之友(影像视觉)(2017年10期)2017-11-07
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
家教世界·创新阅读(2014年5期)2014-07-09
癌变·畸变·突变(2014年2期)2014-03-01
