
鸭式旋翼/机翼无人机飞行动力学建模与分析
2012-11-09 00:49盖文东王宏伦李大伟
空气动力学学报 2012年2期
盖文东, 王宏伦, 李大伟
(1.北京航空航天大学 飞行器控制一体化技术重点实验室,北京100191;2.北京航空航天大学 无人驾驶飞行器设计研究所,北京100191)
0 引 言
鸭式旋翼/机翼(Canard Rotor/Wing,CRW)无人机是一种把直升机悬停、低速飞行特性与喷气式固定翼机高亚声速巡航特性相结合的一类新型航空器[1-2],因其特殊的垂直起降能力,它可以在舰船的狭小甲板和前沿地带起降,并可广泛用于侦察搜索、战术空中支援、中继通信和后勤补给等军、民用领域。CRW无人机兼有直升机和固定翼机两种飞行模式,因此不仅要使其在两种飞行模式下分别稳定,更重要的是使其在旋/定和定/旋转换过程中保持稳定。因此,建立能够反映两种飞行模式,特别是飞行模式转换过程飞行特性的动力学模型,是实现其性能分析与稳定控制的前提。
文献[3-4]利用1/5尺寸CRW 模型进行低速风洞实验,得到CRW在固定翼飞行模式和转换飞行模式的部分纵向气动数据,并分析了CRW的气动特性。文献[5]利用CFD仿真软件,研究了CRW在飞行模式转换过程中的气动特性。文献[6]利用CRW全机模型进行风洞实验,定性分析了旋翼/机翼高速旋转产生的下洗尾流对机身的干扰特性。文献[7]在分析可变飞行模态飞行器动力学本质的基础上,建立了该类飞行器的模型框架结构,但并未给出具体的建模和验证方法。
本文首先对CRW无人机飞行特性进行定性描述;然后通过分析旋翼/机翼的气动特性,以纵向为例,建立了受旋翼/机翼尾迹干扰的CRW动力学模型;最后提出了该机在各飞行模式下的配平策略,并对各飞行模式进行了平衡特性计算及纵向运动稳定性分析,通过与文献[3]中对CRW的分析进行对比,表明本文所建立模型能够反映CRW各飞行模式的典型特性。
1 CRW无人机飞行特性定性分析
如图1所示,CRW在从直升机到固定翼机转换前的低速飞行阶段,处于直升机模式,其气动特性为直升机特性;随着速度的提高和转换控制的进行,鸭翼、水平尾翼承载逐渐增加,旋翼转速逐渐降低,此时气动特性兼有直升机和固定翼机特性;随着转换过程的继续和旋翼逐渐卸载,直升机特性淡出,而固定翼机特性增强,直到旋翼完全卸载并锁定,转变为鸭翼和水平尾翼承载的固定翼机特性。随后,进行鸭翼、机翼和水平尾翼的载荷重分配,转变为三翼面固定翼机特性。

图1 CRW无人机的两种飞行模式Fig.1 Two flight modes of CRW UAV
本文研究的CRW无人机,其重心位置位于旋翼转轴之后,其惯性特性、三视图和各气动部件几何参数如图2和表1所示。

图2 CRW无人机三视图Fig.2 CRW 3-view drawing
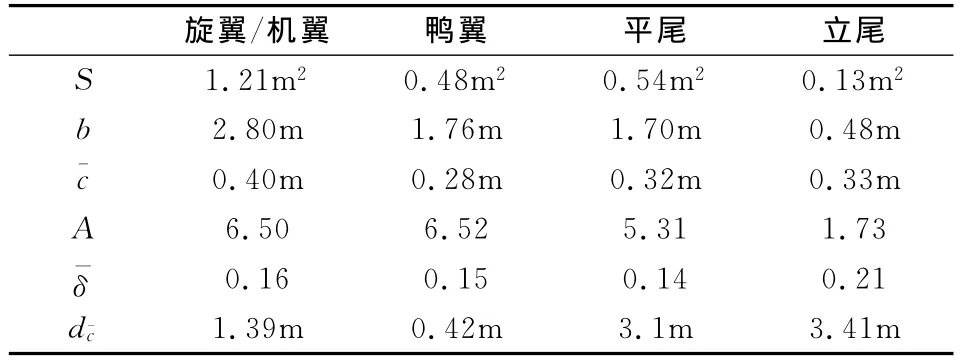
表1 CRW无人机主要气动部件几何参数Table 1 Geometry parameters of main components in CRW
表1中,S为面积,b为展长为平均气动弦长,A为展弦比为相对厚度,d为平均气动弦前缘到机头的距离。
2 CRW无人机动力学建模
2.1 旋翼/机翼的气动力及力矩
CRW无人机的旋翼/机翼采用椭圆翼型,且具有类似直升机旋翼控制的周期变距和总距,假定旋翼/机翼的挥舞角在旋转中心,没有偏置量,即不产生桨毂力矩。
将旋翼/机翼产生的气动力简化为作用在桨毂上的力矢量,其在机体坐标系中的力和力矩分量为

式中ε为后倒角,其向后偏转时ε>0;xH和zH为桨毂中心在机体坐标系的坐标;T为旋翼/机翼拉力,且与旋翼/机翼转速的关系为

式中kn为比例系数,n为旋翼/机翼转速(转/分)。
当CRW处于悬停时,旋翼/机翼拉力平衡自身重力的同时需留有一定余量,即0.8Tmax=mg。另外旋翼转速需满足最大叶尖速度限制,因此,选取比例系数kn=4,此时最大叶尖速度为202m/s。
气流速度在桨毂处沿机体坐标系的分量可表示为

式中u和w分别为气流速度在机体轴x和z方向的分量,q为俯仰角速度。
如图3所示,将气流速度分解为平行于桨毂平面的Ut和垂直于桨毂平面的Uc。

由动量理论[8],旋翼/机翼产生的诱导速度vi为

式中ρ为空气密度,R为旋翼/机翼半径,令vh=则式(5)可简化为

采用数值算法求解式(6),即可得到vi。
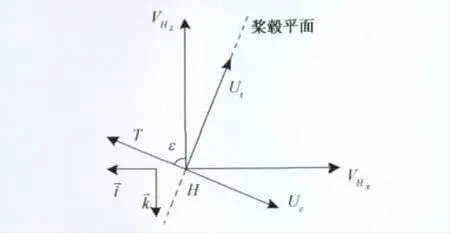
图3 旋翼/机翼桨毂处的气流分量Fig.3 Components of wind at rotor/wing hub
2.2 鸭翼、平尾的气动力及力矩
在直升机和转换飞行模式,旋翼/机翼产生的诱导气流对鸭翼和平尾产生较强的下洗影响。由图2可知,在悬停时,鸭翼完全处于旋翼/机翼下洗流区,而平尾则在其外。以直升机模态前飞时,旋翼/机翼尾迹向后倾斜,其倾斜角χ如式(7)[9]。

式中V为飞行速度,桨盘迎角αs=α+ε,α为全机迎角。随着前飞速度增加,鸭翼将逐渐脱离下洗流区,而平尾将进入下洗流区。因此将鸭翼划分为下洗流区和自由流区,面积分别为Sss和Sfs,并假定下洗流区内,诱导气流是均匀的。旋翼/机翼尾迹对鸭翼和平尾的气动干扰影响如图4所示。

图4 旋翼/机翼尾迹影响区示意图Fig.4 Sketch map of rotor/wing slipstream effect
图4中阴影部分为下洗流区Sss,空白部分为自由流区Sfs。将鸭翼近似看作矩形,其长和宽分别为鸭翼展长bcan和平均气动弦长。
下洗流区内,鸭翼处气流速度沿机体坐标系的分量为

式中xcan、zcan为鸭翼气动中心在机体坐标系的坐标。下洗流区外,鸭翼处气流速度沿机体坐标系分量为

处于下洗流区和自由流区的鸭翼气动迎角为

式中φcan为全动鸭翼偏转角。
由图4可得下洗流区和自由流区面积为

式中xfs为

式中xH>0,zH<0,dcan>0。
由式(9-11)可得鸭翼的升力和阻力为

式中Qss、Qfs分别为下洗流区和自由流区动压。

将鸭翼升力和阻力转换到机体坐标系得

鸭翼产生的气动俯仰力矩为

式中为鸭翼的零升俯仰力矩。
平尾气动力和力矩可采用类似方法求得,这里不再赘述。
2.3 机身的气动力及力矩
在直升机和转换飞行模式,机身处于旋翼/机翼尾迹影响中,将其影响等效为垂直吹风阻力,并用垂直增重系数K⊥表示[10],且忽略下洗流产生的机身干扰力矩。

式中=V/ΩR,桨盘载荷p=m/πR2,Ω为旋翼的角速度,则CRW的重力G为

2.4 发动机的推力及力矩
CRW无人机涡扇发动机产生的气流除驱动旋翼/机翼旋转外,还可从机身尾喷口喷出,作为固定翼机和转换飞行模式的推力,其在机体坐标系中的力和力矩分量如式(19)[7]。
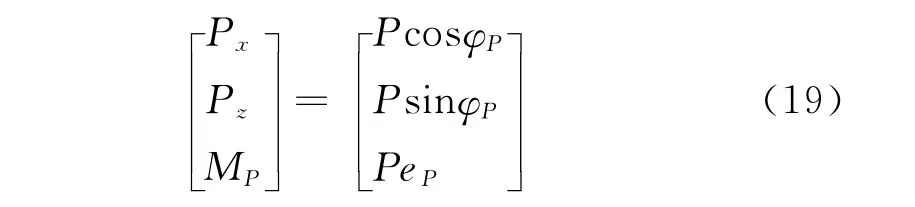
式中P为尾喷口推力大小,φP、eP分别为推力与机体轴Ox的夹角和对于质心O的偏心距。
2.5 气动数据的获取
CRW无人机气动数据方面的资料比较少,文献[3]只给出了固定翼机和转换飞行模式的部分纵向气动数据,无法满足前述CRW的建模需要。因此本文按照图5所示的流程,主要采用气动特性工程估算、CFD仿真得到CRW的横纵向气动数据,并使用文献[3]中的结果对其进行修正,以得到较为完整、真实的气动数据。
2.6 CRW无人机的纵向动力学模型
根据前文所述,CRW无人机的纵向动力学模型为
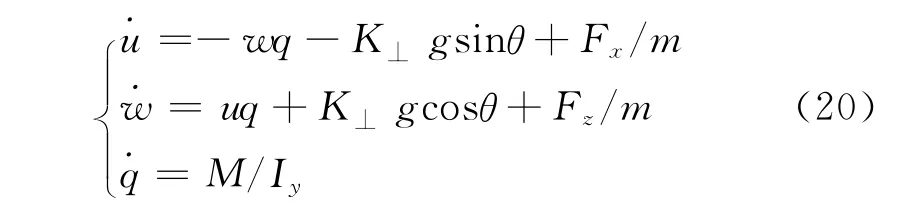
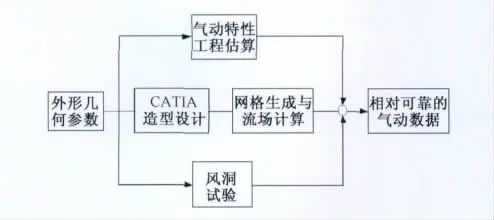
图5 气动数据获取流程图Fig.5 Flow chart of aerodynamic data
式中θ为俯仰角,u、w分别为飞行速度在机体轴前向和垂向分量,力和力矩Fx、Fz、M为

式中、、Mht为平尾气动力和力矩,可采用类似式(15、16)的方法得到、、Mbody为不考虑旋翼/机翼尾迹干扰的机身气动力和力矩;直升机和转换模式、、Mrotor可由式(1)得到,固定翼模式可根据固定翼飞机机翼的气动力和力矩求取方法得到。CRW横侧向动力学模型可采用类似方法得到,这里不再赘述。
3 CRW无人机平衡特性及运动稳定性
Matlab工具箱函数fminsearch(Fun,…)常被用于求解无约束非线性方程的优化问题,本文使用该函数求解CRW非线性方程,并使得代价函数J取最小值,从而完成整个转换过程的纵向平衡计算,代价函数J为

稳定性分析需要系统线性化方程,通常采用小扰动线性化方法在某个平衡状态下得到飞行器线性化方程,它根据众多气动导数计算相应气动力和力矩导数,进而得到线性化方程,该方法物理意义明确但计算过程比较繁琐。本文使用numjac(Fun,…)函数数值求解CRW非线性方程的雅克比矩阵,得到其状态空间表达式,从而简化了线性化计算过程。上述两个函数中出现的输入参数Fun即为前文建立CRW非线性模型。
3.1 CRW无人机各飞行模式的平衡特性
3.1.1 各飞行模式的配平策略
CRW无人机具有多个操纵面,这提供了控制上的灵活性,但增加了系统的复杂性。由式(22)可见,纵向平衡计算独立方程数只有三个,因此需要某些控制量按照预定规律(线性或非线性)变化,其他控制量则通过平衡计算得到。
在直升机飞行模式,为了减小旋翼/机翼尾迹对鸭翼和平尾的气动干扰,且使鸭翼和平尾在不失速的条件下提供尽可能大的升力,将它们分别固定在12°和8°。此时尾喷口推力为零,通过平衡计算得到旋翼/机翼拉力、后倒角和机身俯仰角的配平值。
在转换飞行模式,由于旋翼/机翼需要逐渐卸载并锁定,而且鸭翼的偏转会对旋翼/机翼和平尾产生较强干扰影响[3],因此,使旋翼/机翼转速和后倒角按照预定曲线减小为零,鸭翼固定为12°,通过平衡计算得到推力、平尾偏转角和机身俯仰角的配平值。
在固定翼飞行模式,首先需要完成鸭翼、旋翼/机翼和平尾间的载荷重分配,此时,鸭翼偏转角按预定曲线减小为0°,平衡计算得到推力、平尾偏转角和机身俯仰角的配平值;接下来进入固定翼巡航飞行模式,平尾偏转角按预定曲线减小为0°,通过平衡计算得到推力、平尾升降舵偏转角和机身俯仰角的配平值。
3.1.2 各飞行模式的平衡特性计算与分析
设CRW无人机处于3000m高度,从0m/s的悬停状态,以直升机模式逐渐加速到60m/s;在飞行模式转换阶段,以直升机和固定翼机的混合飞行模式逐渐加速到80m/s,旋翼/机翼逐渐停止旋转,并被锁定;在固定翼飞行模式,逐渐加速到120m/s的巡航速度。按前述配平策略,CRW在各飞行模式下的平衡计算结果如图(6)~图(8)。

图6 不同前飞速度下俯仰角(或迎角)平衡计算结果Fig.6 Pitch angle trim figure in different velocities
由图6可见,在直升机模式,俯仰角逐渐减小;在转换模式,俯仰角先增大后减小;在固定翼机模式,俯仰角逐渐变为固定翼巡航模态时的配平值。在80~100m/s之间俯仰角先减小后增大,此时完成三翼面载荷重分配。在整个转换过程中,俯仰角变化较为平缓,最大值为8.45°。
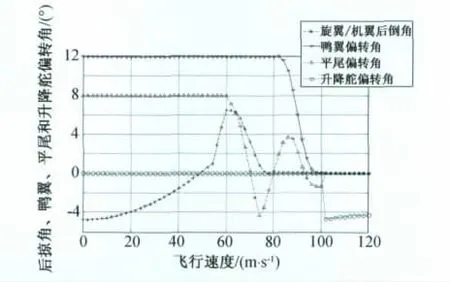
图7 不同前飞速度下控制量平衡计算结果Fig.7 Control trim figure in different velocities
图7为CRW在各飞行模式下,主要控制量的变化情况。在直升机模式,后倒角逐渐增大;在转换模式,后倒角逐渐减小为0°,鸭翼为固定值,主要通过平尾偏转实现配平。在固定翼模式前期,鸭翼偏转角逐渐减小为0°,平尾偏转实现三翼面载荷重分配;在固定翼巡航模式(100m/s以后),平尾升降舵偏转实现纵向配平。
图8为CRW在各飞行模式下,主要部件作用力的变化情况。在直升机模式,旋翼/机翼表现为拉力作用,随着飞行速度增加,鸭翼和平尾升力逐渐增大,旋翼/机翼拉力逐渐减小。在转换模式,旋翼/机翼逐渐卸载,推力逐渐增大,此时鸭翼和平尾为主要升力部件。在固定翼模式前期,完成三翼面载荷重分配,即平尾和旋翼/机翼升力逐渐增加、鸭翼升力逐渐减小。在固定翼巡航模式,鸭翼、平尾和旋翼/机翼三个翼面共同承担飞机载荷。

图8 不同前飞速度下主要部件作用力Fig.8 Force of main components in different velocity
各飞行模式平衡特性计算结果与分析表明,所建立模型的飞行特性与前述CRW无人机飞行特性定性分析是一致的。
3.2 CRW无人机各飞行模式的运动稳定性
以纵向运动稳定性为例,选取CRW无人机不同飞行模式的两组典型飞行状态,其纵向模态特性如表2。横侧向运动稳定性可以采用类似方法得到,这里不再赘述。

表2 CRW无人机纵向模态特性Table 2 Longitudinal modes characteristic of CRW
直升机模式时,短周期模态特征根为具有负实部的共轭复根,长周期模态特征根为正实根或具有正实部的共轭复根,因此,直升机飞行模式的短周期模态快速振荡收敛,长周期模态缓慢发散,这类似于单旋翼带尾桨直升机的特性[10]。
转换模式初期,飞机迎角为-6.93°,存在两个正实数特征根,此时是不稳定的;转换模式末期,飞机迎角为7.59°,存在负实部的共轭复根,此时是稳定的。文献[3]的气动数据分析表明,在模式转换阶段,CRW在小迎角时是不稳定的,在较大迎角时是稳定的,这是转换模式的重要特性。可见所建立的模型反映了CRW转换模式的典型特性。
固定翼模式时,两种飞行状态的迎角分别为5.78°和3.59°,它们的特征根均为具有负实部的共轭复根,因此是稳定的。文献[3]的气动数据分析表明,固定翼巡航模式,当迎角α>3°时,CRW是稳定的。可见,所建立的模型反映了CRW固定翼模式的典型特性。
4 结 论
根据CRW无人机的动力学特点,本文以纵向为例建立了CRW无人机各飞行模式的动力学模型,提出了配平策略,完成了平衡特性计算和纵向运动稳定性分析。结果表明,在各飞行模式下,所提出的配平策略是合理的,所建立模型的配平状态和控制量均在合理范围内,并且该模型能够正确反映CRW无人机的典型特性,可用于飞机动态分析和飞行控制系统设计。
[1]MITCHELL C A,VOGEL B J.The canard rotor wing(CRW)aircraft-a new way of fly[R].AIAA 2003-2517,2003.
[2]邓阳平,高正红,詹浩.鸭式旋翼/机翼飞机的技术发展及其关键技术[J].飞行力学,2006,24(3):1-4.
[3]BASS S M,THOMPSON T L.Low-speed wind tunnel test result of the canard rotor/wing concept[R].AIAA 1993-3412,1993.
[4]BASS S M,THOMPSON T L.Fixed-wing performance predictions of the canard rotor/wing concept based on wind tunnel test results[R].AIAA 1995-1887,1995.
[5]PANDYA S A,AFTOSMIS M J.Computation of external aerodynamics for a canard rotor/wing aircraft[R].AIAA 2001-0997,2001.
[6]邓阳平,高正红,詹浩.鸭式旋翼/机翼飞机悬停及小速度前飞气动干扰实验研究[J].实验力学,2009,24(6):563-567.
[7]盖文东,王宏伦,李大伟.一类可变飞行模态飞行器的统一建模研究[J].系统仿真学报,2010,22(增):249-253.
[8]CARLSON E B.Optimal tiltrotor aircraft operations during power failure[D].University of Minnesota,1999.
[9]JOHNSON W.直升机理论[M].孙如林,译.北京:航空工业出版社,1991:73-76.
[10]高正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2003:64-65.
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2020年10期)2020-11-14
学习周报·教与学(2020年25期)2020-10-21
数学学习与研究(2019年5期)2019-05-08
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年6期)2017-11-23
理科考试研究·高中(2017年7期)2017-11-04
百科探秘·航空航天(2017年4期)2017-07-10
航空模型(2016年10期)2017-05-09
舰船科学技术(2016年1期)2016-02-27
