
2.4m 跨声速风洞颤振试验流场控制技术研究
2012-11-20 10:03秦建华
实验流体力学 2012年6期
芮 伟,易 凡,杜 宁,秦建华
(中国空气动力研究与发展中心,四川 绵阳 621000)
0 引 言
颤振是飞行器上出现的一种破坏性振动,一旦飞行速压超过临界值,振幅就迅速增大,它是在气动力、弹性力和惯性力作用下的自激振动,是从气流中吸取能量的结果。由于颤振的危害性,故飞行器在飞行包线内绝对不允许出现颤振现象[1]。为了评估飞行器安全飞行的颤振包络线,需要在2.4m 跨声速风洞(以下简称:2.4m 风洞)建立颤振试验技术。它对风洞提出了两种流场控制方式。方式一:定马赫数阶梯变速压的试验方式,即保持马赫数为定值,通过逐步增加试验段气流总压的方法增加速压,逐步逼近颤振临界速压,甚至增加到模型出现颤振。该方式要求其启动过程速压平滑上升,总压超调小于0.5kPa,一次启动要完成4个以上尽可能多的速压阶梯,在出现险情时,具有自动平稳关车的能力,速压按要求的速率下降。该方式适用于临界速压范围比较宽的情况。方式二:定总压线性变马赫数方式,即固定总压,通过连续、线性地增加马赫数,逐渐提高总压(密度),切割颤振临界速压随马赫数变化曲线,获取颤振临界速压。该方式适用于临界速压对马赫数变化比较敏感的情况。在实际应用中,组合使用两种方式可以获得较好的试验效果。结合暂冲式风洞的特点,为拓展风洞试验能力,采用基于运动规律法的定马赫数阶梯变速压智能控制策略和基于运动函数的定总压线性变马赫数控制策略,实现了颤振试验流场控制,满足了试验要求。
1 2.4m 跨声速风洞流场控制模型
2.4m 风洞用于流场建立的控制系统包括主引射器调压阀控制系统、主排气阀稳定段总压控制系统、栅指马赫数控制系统、驻室流量阀马赫数控制系统和驻室引射器调压阀控制系统。受风洞闭合回路的影响,风洞稳定段总压和马赫数可表示为式(1)[2]。从模型中可以发现2.4m 风洞是一个多输入两输出的多变量控制系统。

式中,P0为稳定段总压(MPa);Ps为稳定段总压(MPa);Ma为试验段马赫数;Py为主引射器引射压力(MPa);Sfig为栅指位移(mm);SZL为驻室流量阀位移(mm);Pfy为辅引射器引射压力(MPa);SME为主排位移(mm)。
2 技术要求和难点
(1)定马赫数阶梯变速压试验工况的技术要求:
·马赫数试验范围0.3~1.2;
·一次车总压试验范围105~450kPa,总压的阶梯跨度可高达150kPa以上;
·在启动过程中,速压平滑上升,且要求各阶梯总压调节过程不得超过下一阶梯总压设定值,由于总压阶梯最小变化量为0.5kPa,即总压调节过程的超调量以0.5kPa为限;
·在出现险情时,具有自动平稳关车的能力,即关车时总压下降要均匀、速度要受控;
·一个启动要完成4个以上尽可能多的速压阶梯。
(2)定总压线性变马赫数试验工况的技术要求:
·马赫数试验范围0.3~1.2;
·总压试验范围105~450kPa。
(3)定马赫数阶梯变速压试验工况的技术难点:
结合2.4m 风洞的特点,确定采用定马赫数阶梯变总压的方式来实现定马赫数阶梯变速压的试验工况。由于2.4m 风洞是一个多输入两输出的多变量控制系统,其风洞流场控制存在强非线性、强耦合以及控制参数之间大滞后的多变量调节特性。同时,整个流场控制过程分成启动充压、流场调节、变总压以及关车等四个控制环节。启动充压环节主要实现风洞从无风状态到首个总压阶梯变化的调节过程,涉及到“三个切换”,即主调由控制总压到控制主引压力的切换、主排由位置闭环到总压闭环的切换、栅指和驻流由位置闭环到马赫数闭环的切换,且系统之间存在着相互耦合以及大滞后等问题,使得整个启动过程的控制难度增大;流场调节环节主要实现总压和马赫数的精确调节,涉及栅指和驻流的闭环控制;变总压环节主要实现从当前总压到目标总压的变化过程,涉及总压、主引压力的协同变化控制;关车环节主要是实现总压平稳下降,使该过程成为涉及主引射压力、总压的多变量控制过程。其中,流场调节环节和变总压环节交替切换进行。
(4)定总压线性变马赫数试验工况的技术难点:马赫数线性变化过程,涉及到栅指、驻流对马赫数变化的快速跟随问题。
3 定马赫数阶梯变速压方式
2.4m 风洞是一个非线性、强耦合、大时滞的多变量控制系统,总压处于工作点附近时可采用线性化控制策略,而总压的大跨度调节过程为强非线性的暂态过程,为缩短总压的调节时间同时减小超调,可采用模糊算法和智能分段变PI相结合的方法,即总压大阶梯变化时,根据运动规律法的特征,采用模糊算法将该过程分为多个调节段,各段则根据误差和误差变化率智能选择调节参数,当误差变化到一定范围内则采用智能分段变PI控制器实现对总压的精确调节。其中,运动规律法主要是采用偏差e和偏差变化速度来决定控制模态,在(e-)相平面上理想的相轨迹如图1所示。其中,偏差e1由系统固有特性决定。在实时控制中,偏差e1可直接取为设定值变化量Δyr,e4和为满足控制精度要求的偏差和偏差变化速度。整个变化过程分为四部分:第一部分:e1→e2段是匀减速运动,采用Bang-Bang控制策略激发出较大偏差变化速度;第二部分:e2→e3段是匀速运动,采用保持较大偏差变化速度的控制策略,尽量减小偏差;第三部分:e3→e4段是匀加速运动,采用直接压低较大偏差变化速度的控制策略,避免产生超调,达到控制精度要求的范围;第四部分:e4→原点是匀加速运动,系统已运行到控制精度要求的范围,采用保持控制量的策略。利用运动规律可得到系统在每一段的运行时间和控制律[3]。设计智能控制器最困难的问题是如何选择控制模态切换阈值,因此,采用模糊算法实现分段。整个变速压方式实质上是设计了一个由暂态控制器和稳态控制器组成的控制器,解决了设定值跟踪和抑制负载干扰的矛盾。暂态控制器采用运动规律法进行设计,适用于大滞后过程,适用于启动充压、变总压以及关车等调节环节,具有极好的设定值跟踪能力。稳态控制器采用智能分段PI控制器,适用于流场调节环节,保证了控制器在设定值附近具有良好的调节效果的同时,还具有良好的抑制干扰的能力,如图2。

图1 理想相轨迹Fig.1 Sketch of ideal phase track
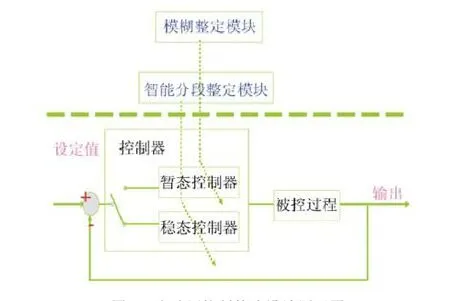
图2 变速压控制策略设计原理图Fig.2 Sketch of control tactics in adjusting dynamical pressure
4 定总压线性变马赫数方式
在2.4m 风洞中,主要是通过控制栅指和驻室流量阀的位置来实现马赫数的精确控制。控制方式包括纯栅指控制、纯驻室流量阀控制、固定驻室流量阀+栅指控制和固定栅指+驻室流量阀控制等4种方式。其中,Ma≤0.9 适用于纯栅指控制方式,0.9<Ma≤1.1适用于固定驻室流量阀+栅指控制和固定栅指+驻室流量阀控制方式,1.1<Ma≤1.2适用于纯驻室流量阀控制。因此,根据2.4m 风洞的实际情况,按照马赫数调节方式和最低启动压力,设计了基于运动函数的定总压线性变马赫数控制策略。主要思想是:启动风洞,建立流场到起始马赫数Ma0,然后以一定的马赫数变化率V1,来给定马赫数的值,待到达目标马赫数Ma1后,保持马赫数的调节状态。如图3。其运动函数如式(2)。在马赫数变化过程中,由于设定马赫数与反馈马赫数之间偏差较小,通过整定PID 参数可以确保在设定值附近具有良好的调节效果。

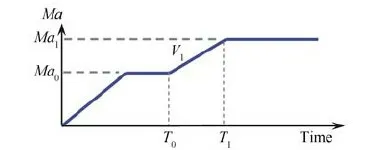
图3 定总压线性变马赫数原理图Fig.3 Sketch of adjusting Mach number
5 实际应用效果
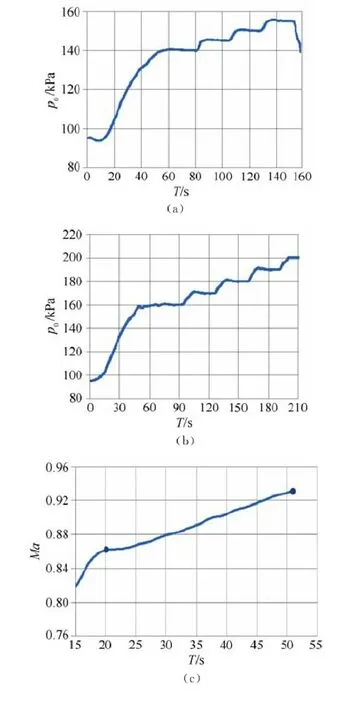
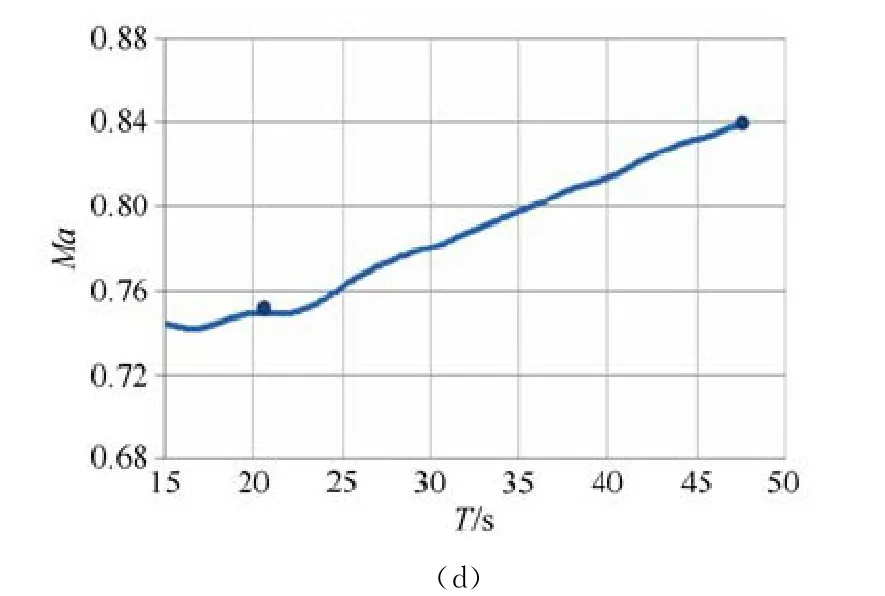
图4 试验曲线Fig.4 Curves of Test
2001年以来,先后完成了变速压和线性变马赫数两种试验工况的设计工作,初步在2.4m 风洞建立了颤振试验流场控制平台,通过数百次的各类型号试验证明,该项试验技术达到了预期的设计效果,受到型号单位的好评。曲线如图4。其中,图4(a)和图4(b)为变速压曲线,图4(a)的试验条件为:马赫数1.1,总压阶梯为140、145、150和155kPa,稳态过程的总压精度控制在0.5%以内,关车过程总压按设定的速率下降至安全区;图4(b)的试验条件为:马赫数0.7,总压阶梯为160、170、180、190和200kPa,总压超调小于0.5kPa,在一次启动中实现了多阶梯大跨度的变速压试验条件,耗气量满足试验要求。图4(c)和(d)为线性变马赫数曲线,图4(c)的马赫数变化范围为0.86~0.94,图4(d)的马赫数变化范围为0.75~0.84,马赫数在设定区域内实现线性变化,没有出现超调和波动的情况,满足了试验要求。
6 结 论
结果表明:
(1)基于运动规律法的变速压控制策略和基于运动函数的线性变马赫数控制策略,满足了颤振试验的要求,具有快速、准确、可靠的试验效果。
(2)稳态过程的总压精度达到0.5%,马赫数控制精度0.005,马赫数试验范围0.3~1.2。
(3)风洞启动时,速压上升曲线比较平滑,总压超调量小于0.5kPa。
(4)风洞关车过程实现了总压以任意设定斜率下降至安全区的功能。
(5)在线性变马赫数试验中,马赫数在设定区域内实现线性变化。
[1] 恽起麟.实验空气动力学[M].北京:国防工业出版社,1994.
[2] 施洪昌.高低速风洞测量与控制系统设计[M].北京:国防工业出版社,2001.
[3] PELA A F.Closed-loop Mach number control in a transonic wind-tunnel[J].AIAA Jounal,1989,30:25-32.
[4] 赵娟平.神经网络PID 控制策略及其Matlab仿真研究[J].微计算机信息,2007,23(3):59-60.
[5] 廖芳芳,肖建.基于BP神经网络PID 参数自整定的研究[J].系统仿真学报,2005,17(7):1711-1713.
[6] 杜宁.2.4m 风洞颤振试验调试总结报告[R].中国空气动力研究与发展中心,2008.
猜你喜欢
计测技术(2022年1期)2022-04-18
军民两用技术与产品(2021年8期)2021-11-24
科学技术与工程(2020年30期)2020-12-04
燃气轮机技术(2020年3期)2020-10-26
小哥白尼(野生动物)(2020年3期)2020-07-27
航空发动机(2020年3期)2020-07-24
航空工程进展(2020年2期)2020-05-06
实验流体力学(2019年6期)2020-01-10
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17
