
基于环形耦合策略的带式输送机多机驱动功率平衡的研究
2013-01-29 05:52李含君
陕西科技大学学报 2013年5期
汤 伟, 李含君
(1.陕西科技大学 电气与信息工程学院, 陕西 西安 710021; 2.陕西科技大学 轻工与能源学院, 陕西 西安 710021)
0 引言
带式输送机具有长运距、大运量、连续输送等优点,运行可靠,易于实现自动化集中控制[1].一般来说,大都采用多电机驱动方式,但由于各种因素的影响,会导致电机功率负载不均衡,严重时会使其中某电机超载运行甚至损坏[2].对于带式输送机多电机驱动的功率平衡控制,文献[3]提出采用主从控制策略,其控制方框图如图1所示,虽然这种控制方式结构简单,但电机之间的同步精度不能够得到保证,且抗干扰性能不够理想.因此,本文提出了适合于带式输送机多电机驱动功率平衡控制的环形耦合策略,能够保证系统良好的同步精度和动态性能.
1 功率平衡控制策略
常用的电机功率平衡控制策略有并行控制策略和主从控制策略[4].其中,并行控制策略是对多个电机设定相同的命令从而得到理想输出,此策略优点在于启停阶段系统的同步性能很好,但当某一台电机收到干扰时,由于各电机之间会产生同步偏差,因此系统的同步性能较差[5];主从控制策略需要定一个主电机,其余从电机跟踪主电机的输出达到同步驱动,此种控制方式结构简单、响应速度快,在功率平衡控制中应用广泛,但任何一个从电机的扰动都不会影响其他电机,因此采用此种策略的电机之间的同步精度不能得到保证,一般应用于同步精度要求不高的场合,而带式输送机的电机功率平衡要求较高,应该采用更先进的控制策略以保证电机之间的同步精度[6].
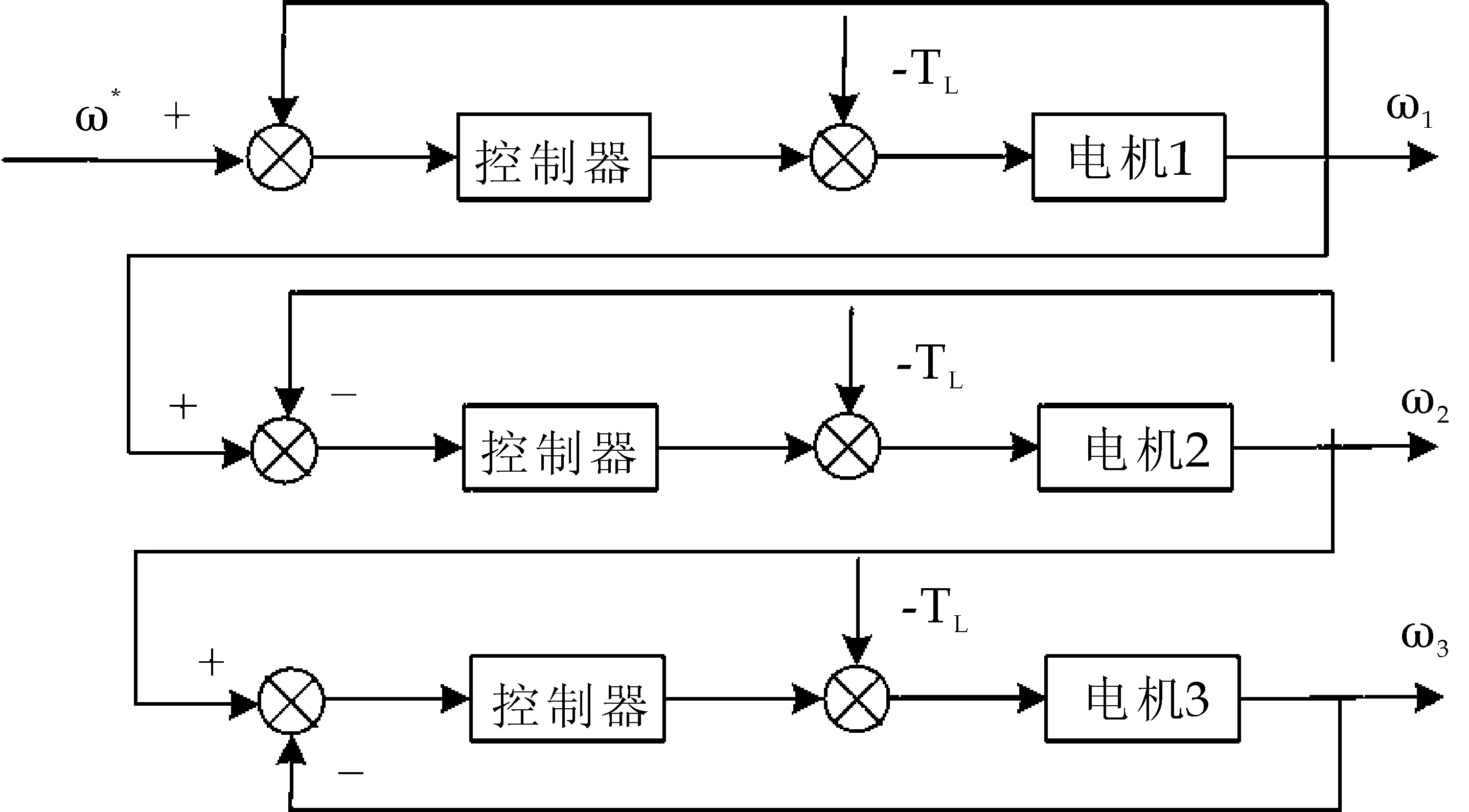
图1 基于主从控制的电机功率平衡控制方框图
环形耦合控制策略是基于耦合补偿原理与同一给定控制相结合的思想形成的,环形耦合控制策略在考虑每台电机转速与给定转速之间误差(跟踪误差)的同时,还考虑该电机转矩与相邻一台电机转矩之间的误差(同步误差)[7].因此,环形耦合策略相对于主从控制策略的优势在于,任何一台电机的转矩变化都会对相邻一台电机形成反馈,所有电机之间两两耦合,最终形成耦合环,从而实现了3台电机之间功率平衡,从而在负载扰动等情况下仍能保证各电机之间较好的同步精度.
本文的研究对象是3台电机驱动带式输送机系统,主要探讨关于带式输送机多电机驱动的功率平衡的模糊控制设计问题,其基于环形耦合策略的电机功率平衡方框图如图2所示.
本文提出的基于环形耦合策略的带式输送机功率平衡控制策略更适合于驱动电机较多且同步精度要求较高的场合,因为系统中每个补偿器都根据相邻两台电机的转矩差确定一台电机的补偿量,任何一台电机的扰动都能及时反应到其他电机,从而保证电机间的同步精度.此外,跟交叉耦合策略相比,补偿器的复杂程度不会随着电机数目的增多而更加复杂,因此更适合于驱动电机较多的场合[8].
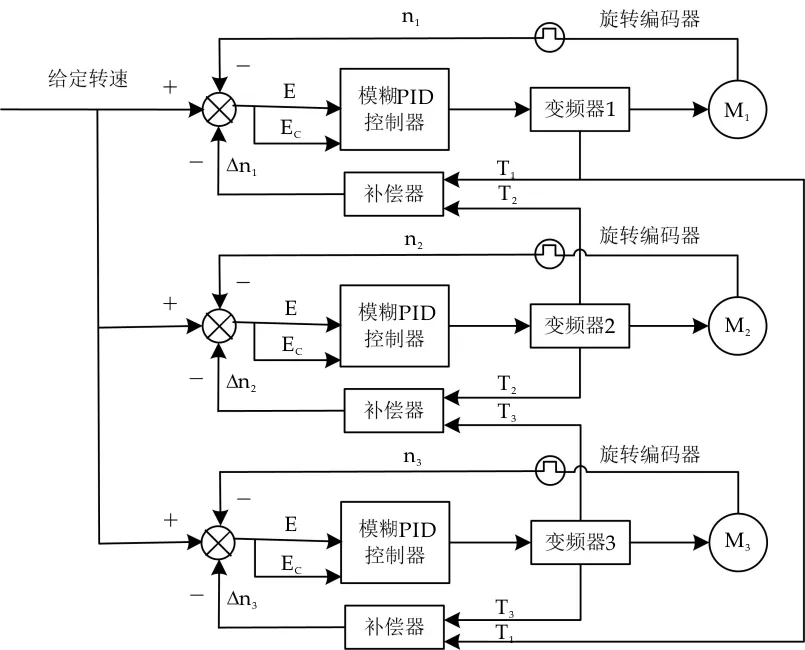
图2 基于环形耦合策略的电机功率平衡控制框图
2 模糊PID控制器的设计
带式输送机多电机功率平衡控制多采用PID控制器来实现,虽然其控制精度高,但鲁棒性较差,这是由于带式输送机的动力学特性较为复杂,导致了控制系统的鲁棒性由于系统模型参数的不确定性而变差[9].因此,为了提高控制系统的鲁棒性和抗干扰能力,本文将模糊PID控制技术应用到功率平衡系统中,以提高控制系统的鲁棒性并保证更高的控制精度.
2.1 模糊PID控制原理
模糊PID控制器由模糊控制器和PID调节器组成,如图3所示.首先,模糊控制器将操作者的经验转化成模糊规则,然后PID调节器对被控对象进行控制,模糊控制器的两个输入量分别是偏差e和偏差率ec,3个输出量分别是Δkp,Δki,Δkd,模糊PID控制器结合了模糊控制器和PID控制器两者的优势,控制效果好,性能优良[10].
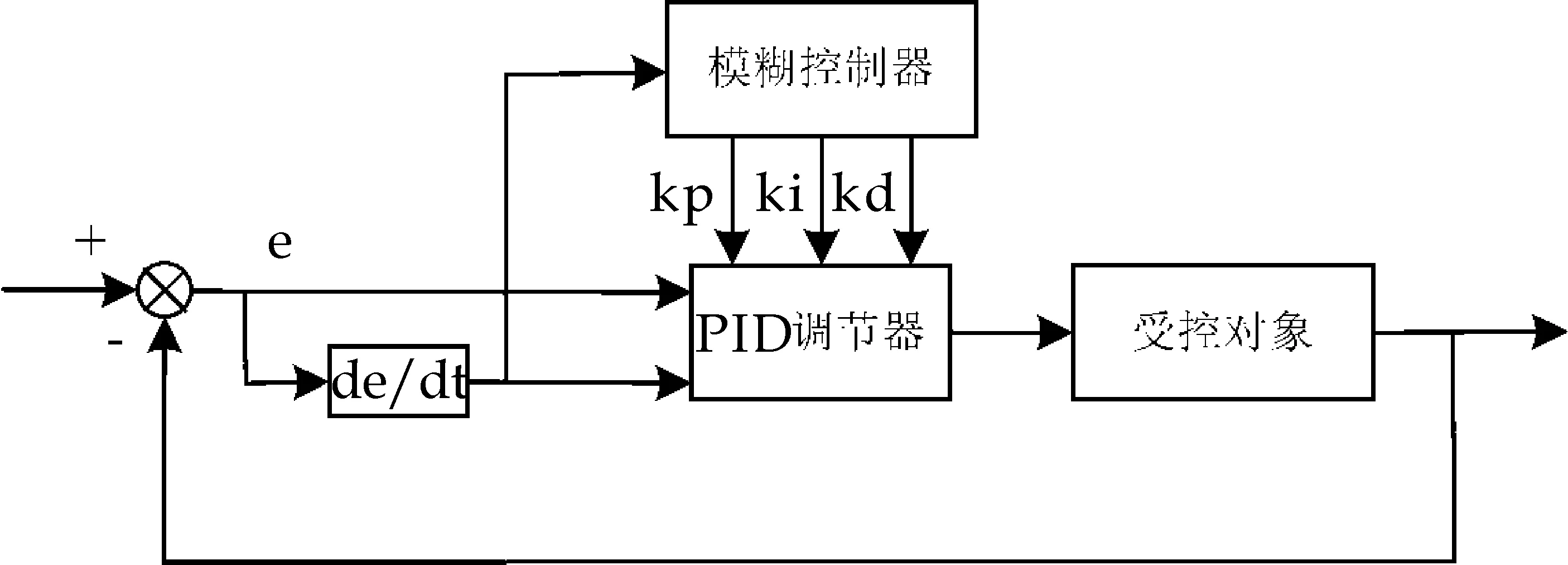
图3 模糊PID控制器结构
模糊PID控制器首先对实际测量的偏差e和偏差率ec模糊化得到E和EC,然后根据一定的计算方法算出输出量的精确值Δkp和Δki,最后送入PID控制器在线调整3个参数[11],其工作原理如图4所示.
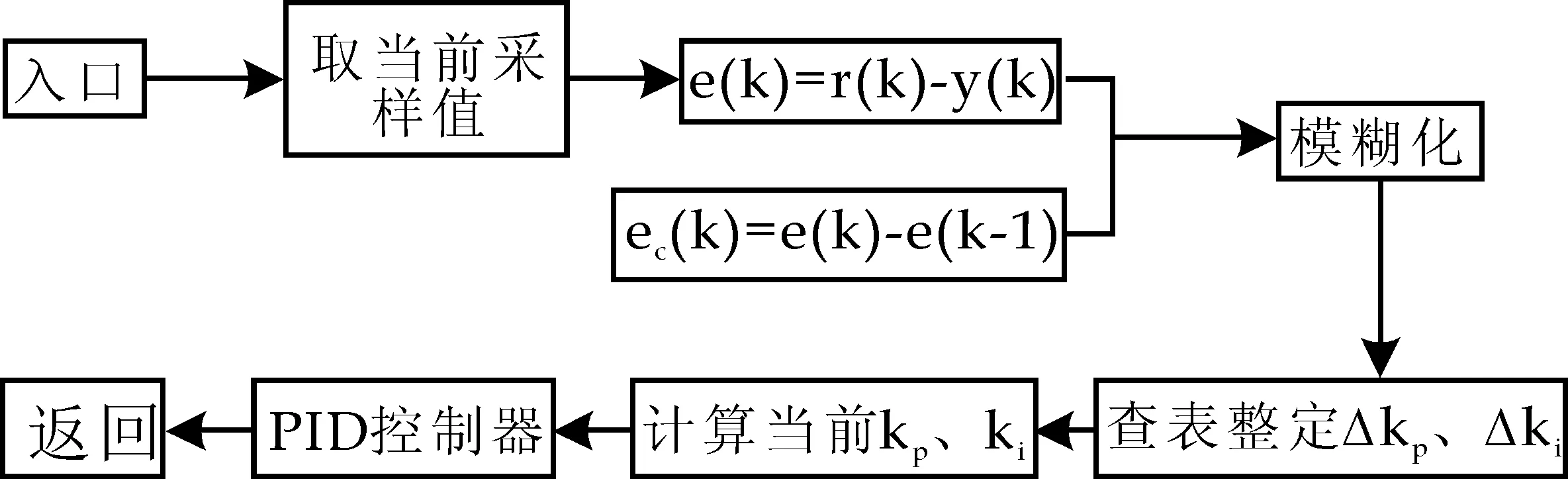
图4 模糊PID工作原理图
对于本系统的研究对象而言,微分环节主要用来控制转矩偏差变化,虽然起到了增加系统的稳定性的作用,但是会增加调节转矩变化的时间,并且降低了系统的抗干扰性,因此,本次设计取消了微分环节,采用PI控制器.
2.2 模糊变量及其论域
选择输入模糊变量为转矩偏差e和转矩偏差率ec,模糊输入变量e,ec取{负大(NB),负中(NM),负小(NS),近似零(O),正小(PS),正中(PM),正大(PB)}7个模糊值.Δkp,Δki为模糊控制器的输出量,模糊输出变量值取{负大(NB) ,负小(NS),近似零(O),正小(PS),正大(PB)}5个模糊值,输入和输出变量的基本论域在模糊集上的论域为 {-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.
2.3 模糊变量的隶属函数和赋值表
输入、输出变量采用灵敏度较高的三角形隶属函数,其隶属函数曲线如图5和图6所示.
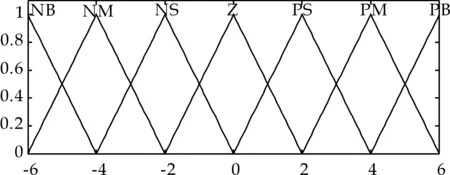
图5 e和ec的隶属函数曲线
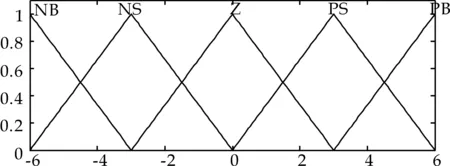
图6 Δkp和Δki的隶属函数曲线
输入、输出模糊变量的赋值表如表1和表2所示.

表1 模糊变量E和Ec的赋值表

表2 模糊变量Δkp和Δki的赋值表
2.4 模糊控制规则
根据带式输送机电机功率平衡系统的特点,可用以下条件语言来表示其模糊规则的推理过程:
if(转矩偏差较大)and(增大趋势)then(较大的kp和较小的ki);if(转矩偏差较小)and(增大趋势)then(中等的kp和较小的ki);if(转矩偏差较大)and(减小趋势)then(中等的kp和较小的ki);if(转矩偏差较小)and(减小趋势)then(较小的kp和较大的ki);根据以上条件语言可以得到以下一系列控制规则:
if(e=NB)and(ec=NB)then(Δkp=PB)and (Δki=NB);if(e=NM)and(ec=NS)then(Δkp=PS)and (Δki=NS);
if(e=NS)and(ec=Z)then(Δkp=Z)and (Δki=PB);if(e=Z)and(ec=PM)then(Δkp=Z)and (Δki=NB);
……
if(e=PS)and(ec=NM)then(Δkp=PS)and (Δki=NS);if(e=PM)and(ec=NS)then(Δkp=NS)and (Δki=PB);
if(e=PB)and(ec=PS)then(Δkp=PB)and (Δki=NS);if(e=PB)and(ec=PB)then(Δkp=PB)and (Δki=NB).
3 仿真结果分析
为了对比主从控制和环形耦合控制的抗干扰性能,本文利用MATLAB仿真软件和Fuzzy工具箱创建系统的仿真模型,设定电机M1为主电机,M2和M3为从电机,在仿真实验中通过给从电机M2加一扰动,观察两侧电机M1和电机M3的转矩跟随情况,若电机M1、M3能够受到M2的反馈而实现转矩跟随,则该控制策略抗干扰性较好,能够保证带式输送机运行过程中复杂情况下的电机功率平衡.
如图7所示,主从控制策略中电机M2在受到扰动后转矩偏离设定值,电机M1、M3没有受到任何影响,仍然保持着原有的稳定状态,即电机M2上受到的扰动不会反馈给主电机M1,也不会反馈给从电机M3,因此该策略的抗干扰性不佳,在带式输送机运行过程中不能保证电机之间的同步精度.
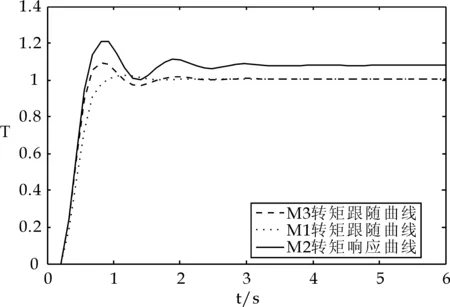
图7 主从控制策略电机转矩响应曲线
如图8所示,环形耦合策略中电机M2在受到扰动后,经过2 s后各电机重新回到设定值,由此说明电机M2发生的扰动都会通过补偿器迅速反馈给电机M1、M3,实现了各电机之间的功率平衡,显出了良好的同步精度和动态性能.
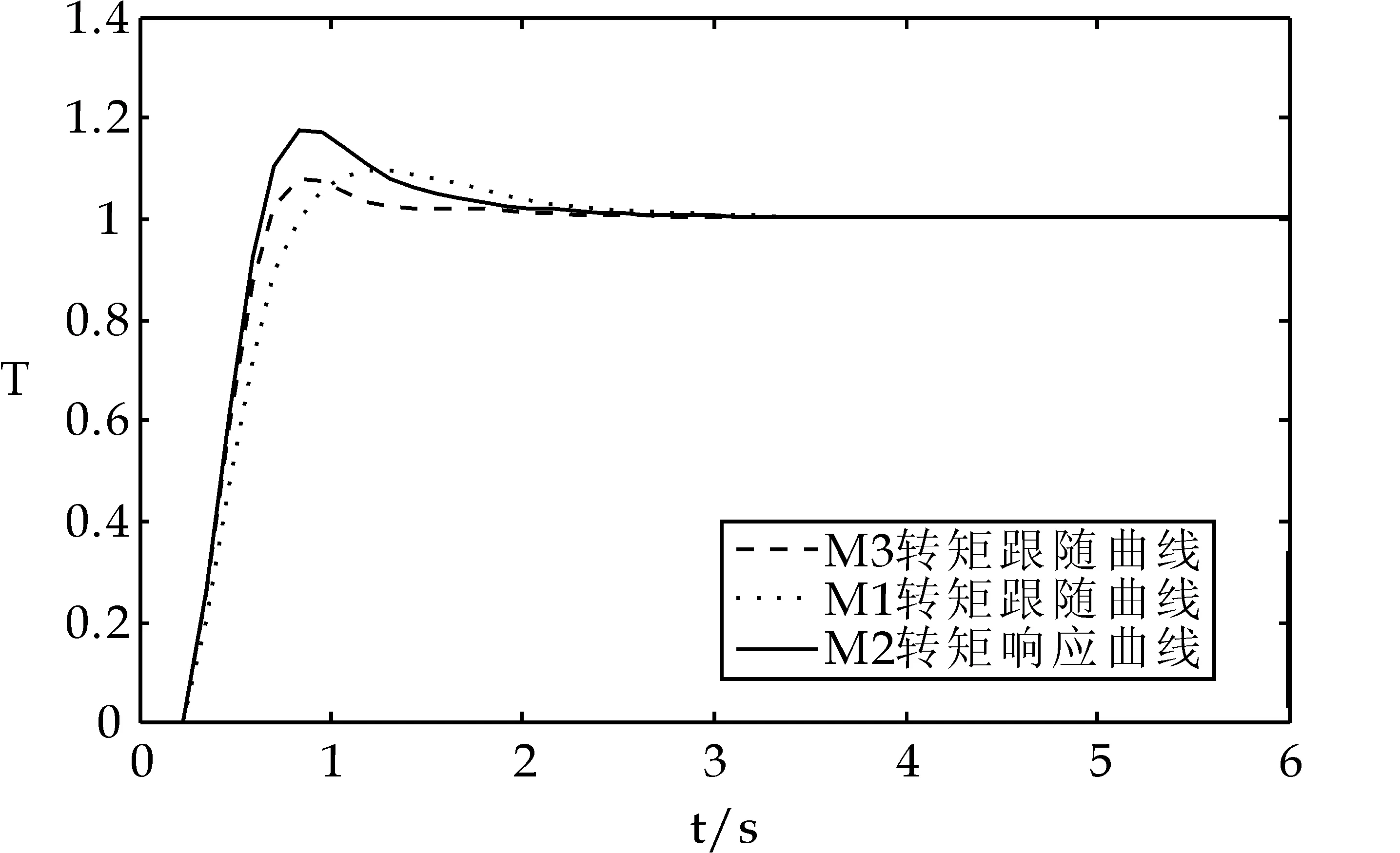
图8 环形耦合控制策略电机转矩响应曲线
4 功率平衡控制系统的实现
功率平衡控制系统主要由S7-300系列可编程控制器(PLC)、变频器等组成,变频器将电机的转矩和转速信号送入PLC,通过模糊PID控制器计算出调节量,将输出信号送入变频器,从而消除了各电机的转矩差,达到功率平衡的目的[12].
模糊PID控制器由PLC程序来实现,功率平衡程序分为三部分,第一部分是PLC采集各电机转速和转矩的程序,第二部分是当转速差不大于3%是进行模糊PID控制器控制,通过查表、计算输入变量、模糊化处理、查表后输出的程序,第三部分是当转速差大于3%时启用速度PID控制的程序,功率平衡系统控制程序流程如图9所示.
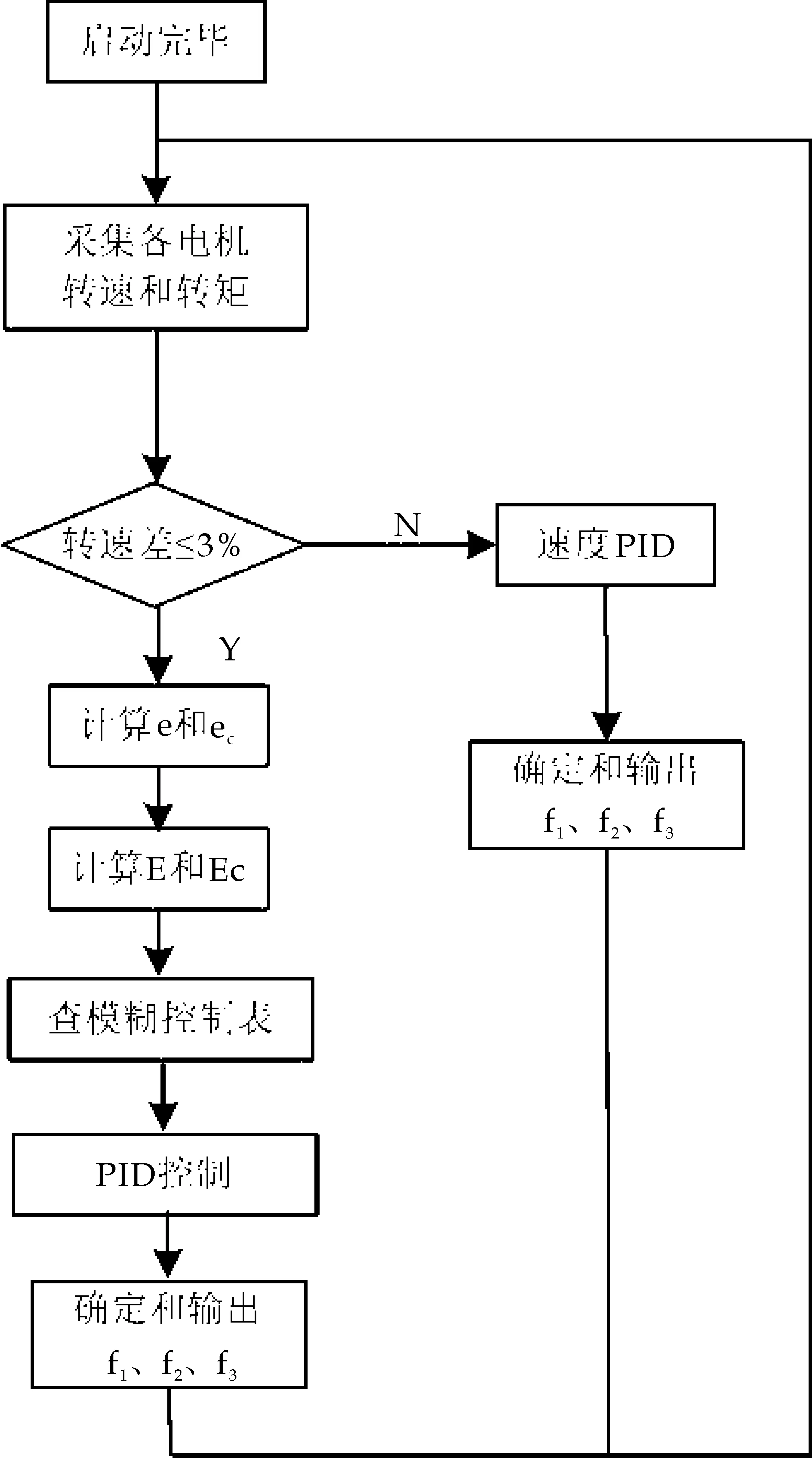
图9 功率平衡系统控制程序流程图
5 结论
本文提出了一种适用于多台电动机的环形耦合的功率平衡控制策略.
在采用模糊PID的基础上,对三个电机主从控制和环形耦合控制分别进行了建模,并用Matlab对其进行仿真研究.仿真结果表明采用环形耦合控制策略具有更高的同步精度和更好的动态性能,满足带式输送机功率平衡控制的要求.
[1] 蒋卫良,韩东劲.我国煤矿带式输送机现状与发展趋势[J].煤矿机电,2008,29(1):1-6.
[2] 朱华平.胶带机多点驱动方式下的功率平衡分配及控制[J].煤矿自动化,1997,25(4):34-36.
[3] 宋宏志,李 明.多电动机功率平衡模糊控制器的设计[J].工矿自动化,2005,33(2):60-62.
[4] 赵永秀,李 忠,赵峻岭.煤矿双滚筒驱动带式输送机的电动机功率平衡[J].西安科技大学学报, 2010,30(6):738-743.
[5] 邓永胜,宋伟刚,赵 琛.双滚筒传动带式输送机的电动机功率平衡[J].东北大学学报,2000,21(5):520-523.
[6] 郭建军,郭建廷.带式输送机多机拖动功率平衡问题的讨论[J].2008,36(1):88-91.
[7] 刘 然,孙建忠,罗亚琴,等.基于环形耦合策略的多电机同步控制研究[J].控制与决策,2011,26(6):957-960.
[8] 付周兴,赵峻岭,郝 帅.多电机驱动带式输送机系统的功率控制[J].西安科技大学学报,2009,29(4):478-486.
[9] 李春华,李 姣.PID与模糊控制算法在带式输送机中的应用[J].煤矿机械,2006,27(10):169-171.
[10] 侯 涛,刘金魁.带式输送机在模糊技术下的多电动机功率平衡控制系统[J].矿山机械,2008,36(19):83-85.
[11] 周妮娜.一种双模糊控制器的设计实现[J].电子设计工程,2011,19(3):65-70.
[12] 韩 峰.PLC在带式输送机中的应用[J].矿山机械,2008,39(9):53-56.
猜你喜欢
冶金设备(2019年6期)2019-12-25
制造技术与机床(2019年11期)2019-12-04
中国煤炭工业(2019年3期)2019-08-27
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
橡胶工业(2015年6期)2015-07-29
橡胶工业(2015年2期)2015-07-29
电机与控制应用(2015年3期)2015-03-01
物流技术(2013年14期)2013-10-24
常熟理工学院学报(2011年4期)2011-03-20
