基于现代控制方法的雷达伺服系统控制分析方法的研究
2013-06-05 13:30张西平
火控雷达技术 2013年1期
张西平 毕 进 郭 敏
(西安电子工程研究所 西安 710100)
1 引言
随着空袭技术的发展,传统的飞机空袭方式已经逐渐演变为巡航导弹、JDM、空地导弹为主的空袭方式。因此对于传统的地面高炮防空系统,其作战对象已经逐渐由飞机目标演变成为各类导弹和制导炸弹。
对于导弹目标,由于目标的受弹截面积大幅度减小,例如对于典型作战飞机其迎头受弹面积一般不低于2m2;对于巡航导弹,其迎头受弹面积减小到了0.5m2以下,而空地导弹迎头受弹截面积则减小到了0.1m2以下。受弹面积的减小,使高炮对目标的命中概率大幅度下降,这迫使高炮为获得足够的命中和毁伤效能需要大幅度的减小对目标的拦截开火距离。拦截射击距离的临近,需要雷达在更近距离精确跟踪目标,这一方面需要雷达最小探测距离进一步减小,同时也需要雷达的角度快速跟踪能力大幅度提高,另外导弹类目标的速度较之低空飞机类目标具有更高的飞行速度,这更加注重雷达的角度快速跟踪能力和精度要求。例如,在60年代前,典型防空火控雷达的最小跟踪距离一般不小于500m,最大跟踪速度一般不大于45°/s,最大加速度不大于60°/s2;上世纪80年代,国际典型防空产品的角度跟踪性能已经提高到最大跟踪速度大于90°/s,最大跟踪加速度提高到200°/s2;而在近期国内某要地光控武器系统对雷达的跟踪性能提高到了最小跟踪距离小于200m,最大跟踪角速度大于300°/s,最大角加速度大于300°/s2。越来越高的跟踪性能指标要求的提出,使得我们很有必要对雷达跟踪伺服系统新的控制方法的做出新的探索,大幅度提高雷达的伺服跟踪性能,满足未来防空不断严酷的性能要求。
2 伺服系统模型的建立
如果将伺服系统中电机与负载作为一个整体来考虑,则该系统称之为单质量系统。但对于实际系统,电机与负载是直接耦合的,而传动本质上是弹性的,并且轴承与负载本身不是完全刚性的。在电机驱动负载运行时,机械轴会受到某种程度的弯曲和变形。对于速度、加速度要求高的雷达跟踪快速目标的伺服系统,弹性形变对其性能造成的影响不能忽略。因此将被控对象视为由电机、负载和连接二者的等效传递轴组成的三质量系统[1],如图1所示。

图1 等效传递轴组成的三质量系统
三质量伺服系统的电学方程和动力学方程如下:电学方程:

电机方程:

负载方程:
传动轴方程:

其中Ja为传动轴的转动惯量,Jm电机转动惯量、JL负载转动惯量、bm电机粘性阻尼系数、bL负载粘性阻尼系数、KL电机与框架之间耦合刚度系数、TmL负载输出端输出力矩、R电机电阻、L电机电感、Km转矩系数、Ce电动势系数、i电机电流、θm电机转角、θ·m电机转速、θL负载转角、θ·L负载转速。针对电机粘性阻尼系数bm、bL负载粘性阻尼系数,其需要大量的实验,因电机参数、负载的变化而异,需要大量的实验归纳其变化规律,在此假设其可测量。
一般情况下Ja相对于JL很小,而且其质量分布在轴的长度上,所以在此可以将其忽略。这样三质量系统化简为二质量系统,其电学方程和动力学方程如下:
电学方程:
电机方程:

负载方程:
传动轴方程:

针对于高精度的伺服系统而言,研究其控制策略时更应该获取能完整反映系统内部特性的系统模型,因此在此对其进行状态空间描述。
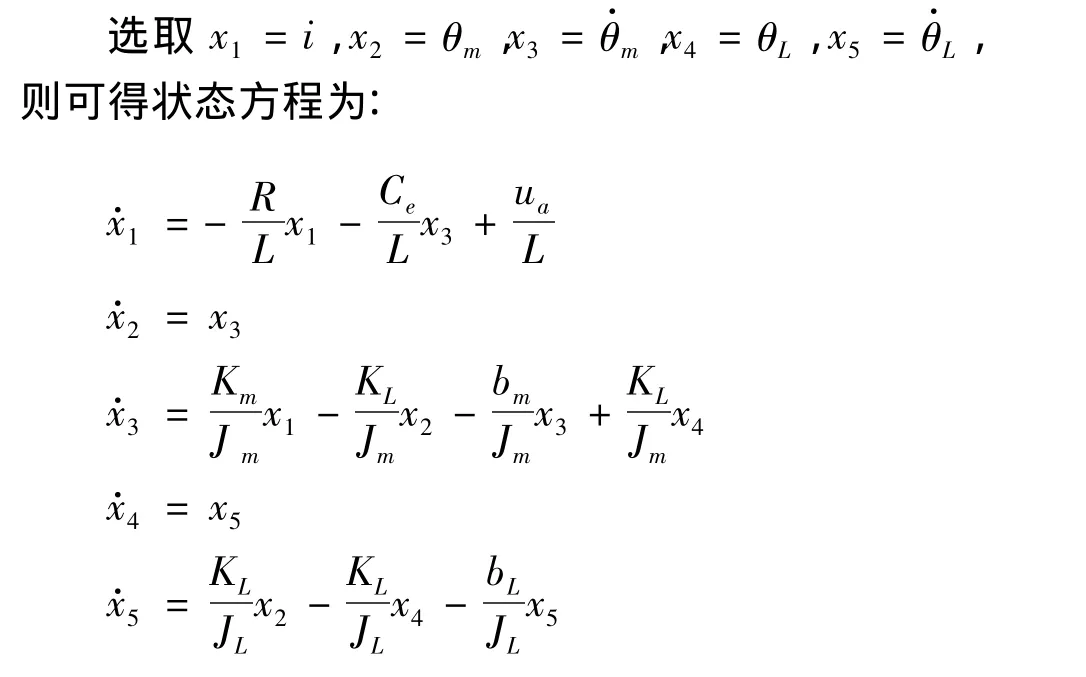
输出方程为:

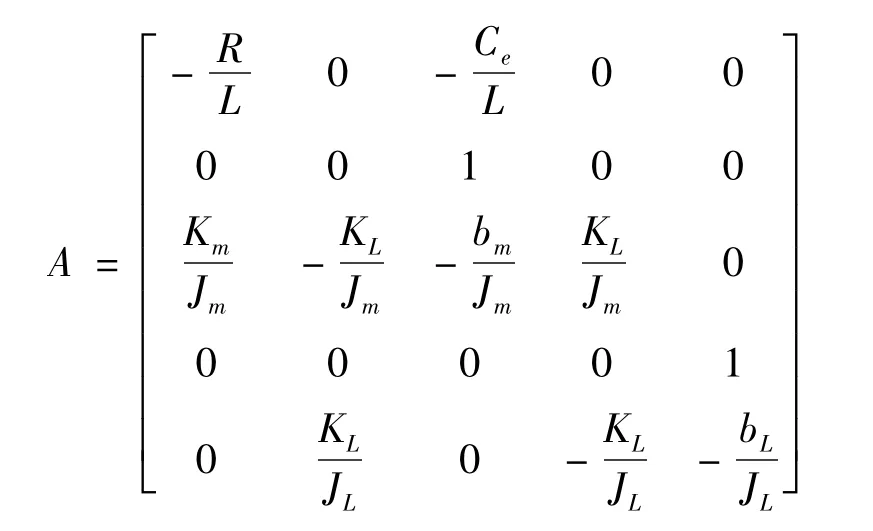
化为矩阵方程为:

Y=[ 0 0 0 1 0]X与一般方程对比则可得在系统状态方程中得系数矩阵为:

将各参数值代入可得状态矩阵为:

3 最优控制律的推导
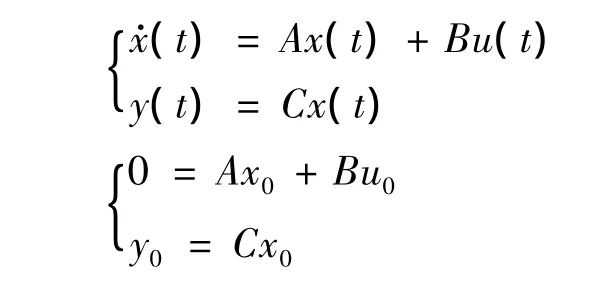
对于一般的被控对象,选取合适的状态变量,都可将其化为如下的形式:

当其期望输出为y*(t),定义误差向量e(t)=y*(t)-y(t)。
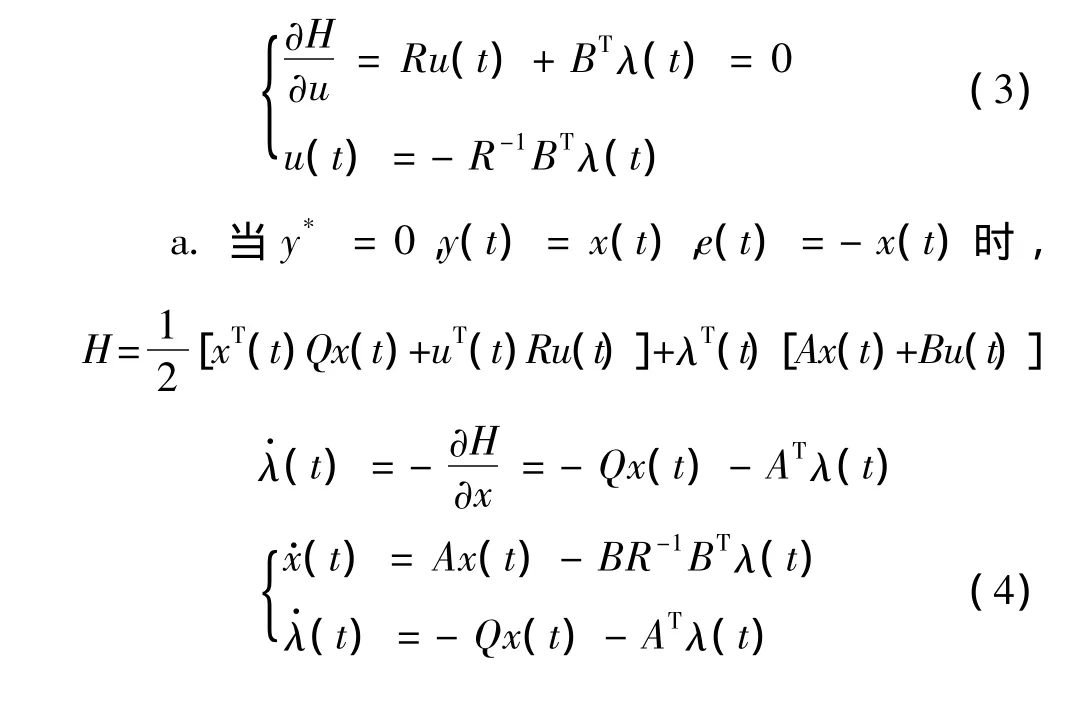
性能指标定义为:

由(4)式可得λ(t)与x(t)成线性关系,则可设:λ(t)=Px(t),有(t)=P(t),代入(4)中可得

即有PA-PBR-1BTP+Q+ATP=0,其为黎卡提方程,可通过调用matlab中函数[3]求得P。

c.当 y*=y0时
采用b中方法可解得:
由最优化原理[2]可得:
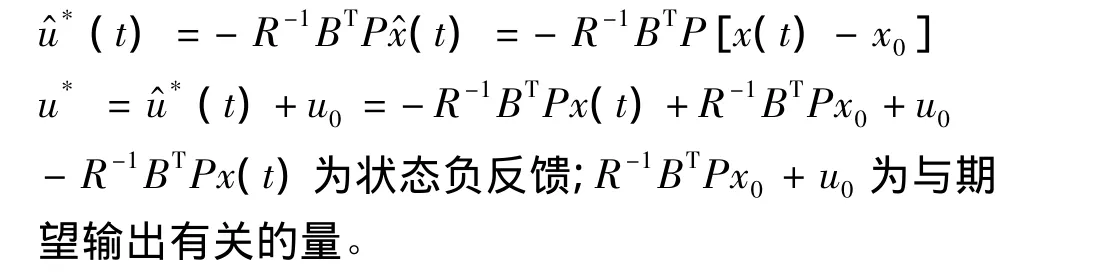
d.当y*=y(t)时,借助上述结论,可设λ(t)=Px(t)+g(t),即最优控制律

或其简化形式为:

a.状态反馈部分的求解
令指标中参数矩阵
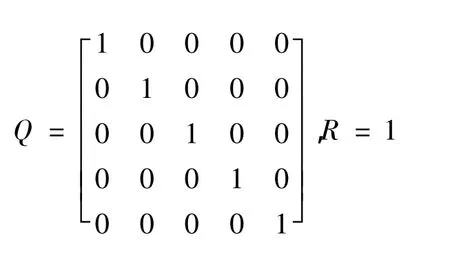
将状态方程中参数矩阵 A、B、C、Q、R代入[K P E]=lqr(A,B,Q,R)中,可得状态反馈系数矩阵、系统极点如下:

b.与期望输出有关部分的求解[4]

4 状态观测器的设计
上述最优控制律中包含有状态反馈部分,为实现状态反馈,系统的所有状态都必须是直接可测量的。而在实际系统中,通常由于各种原因,或者是系统的某些状态变量不能直接测量,或者是由于设备在经济上和使用上的限制,不可能直接量测到系统的全部状态变量,从而造成状态反馈物理实现上的困难。为了克服这个困难,提出了设计状态观测器的问题。
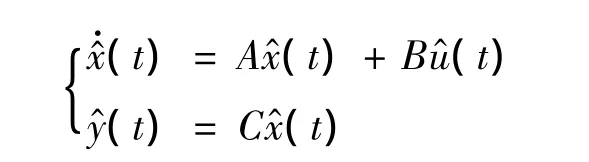
状态观测器的设计本质就是利用原系统可测量的变量如输入向量或者输出向量等作为状态重构系统的输入信号,使得该重构系统的输出(t)在一定性能指标要求下与原系统的状态变量x(t)等价,如图2所示。

图2 状态变量示图
a.可观性分析[5]

则系统不可观测,因此考虑采用降维观测器获得其不可直接测量状态变量。
b.降维观测器的设计[6]

结合被控系统极点,应用极点配置原则,期望极点设置为:

最终状态观测器的设计结果如下:

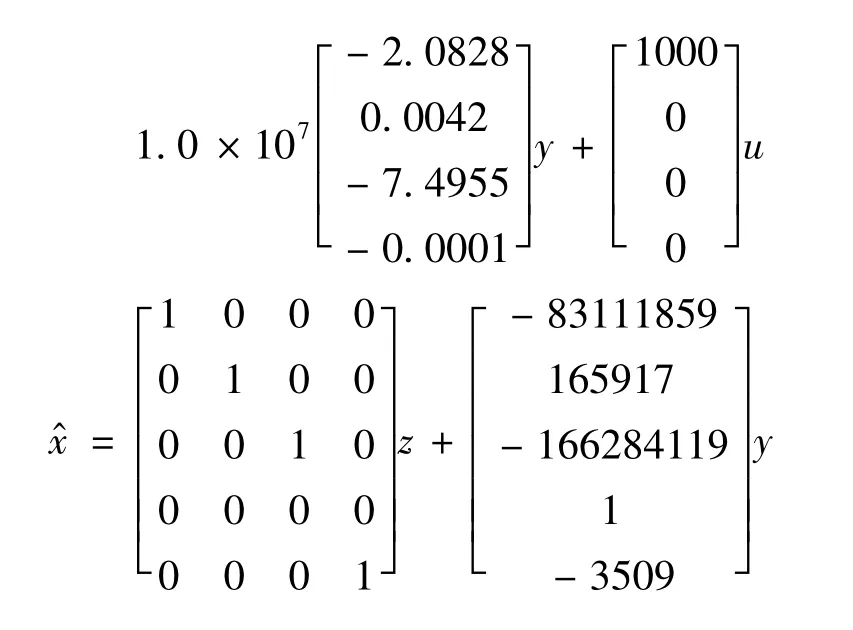
其中z为选取的中间状态变量。
由分离特性可知复合系统特征值是由状态反馈子系统的特征值与状态观测器的特征值组合而成的,且两部分相互独立,互不影响。
5 结束语
新形势下防空系统作战目标的改变,致使对雷达伺服系统在快速跟踪和精确性方面提出更高的要求,建立精确的二质量伺服系统模型,运用现代控制理论中最优化控制思想在精确模型的基础上求解其最优控制律,又因状态变量在现实情况下难以直接获得,通过状态观测器的设计将其重构,使得最优控制律的实现成为可能。这对于在新形势下为满足对雷达伺服系统提出在精度、速度、加速度方面的新要求有着很重要的意义。
说明:本论文目前只限于为一种分析方法,将其转换为一种工程设计方法见后续研究。
[1]刘金琨,先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004,9.
[2]胡寿松,王执铨,胡维礼.最优控制理论与系统[M].北京:科学出版社,2005,9.
[3]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011,2.
[4]宋迎清,曹付华,黄新.微分方程.[M]汉:武汉理工大学出版社,2009,8.
[5]卢京潮.自动控制原理[M].西安:西北工业大学出版社,2004,9.
[6]肖建.现代控制系统综合与设计[M].北京:中国铁道出版社,2000,2.
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年6期)2021-07-20
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
电脑知识与技术(2020年15期)2020-07-04
智能计算机与应用(2020年10期)2020-03-18
财会学习(2018年2期)2018-01-24
导弹与航天运载技术(2016年2期)2016-10-14
北京航空航天大学学报(2016年4期)2016-02-27