大比尺河工模型的精确生潮系统研究与应用
2013-06-15 07:15赵广鑫吴昌林金哲秀
机械与电子 2013年4期
赵广鑫,吴昌林,金哲秀
(1.华中科技大学机械科学与工程学院,湖北 武汉 430074;2.平壤机械大学信息工程系,朝鲜 平壤)
0 引言
河工模型平面比尺一般取值150,300,400,500和800。目前大部分河工模型比尺小、占地大、成本高,而且潮型规则,比较容易控制。但不小于500的大比尺模型尤其是潮型不规则、波动大的防洪变态经济河工模型,对走波水位精度、施工精度等要求和比尺成正相关提高,同时由于模拟走波时间和比尺成负相关缩短,水的运动速度高能量大,流体惯性等因素对控制的影响更为突出。
河工模型生潮方式有尾门溢流、气压水箱等。气压式潮水箱设备占地大,主要应用于特定河工模型,制作对土建施工有特殊的技术要求,设备运行噪音污染大[1];可变溢流尾门式的安装施工阻碍占用河道,不适合应用在宽口及多支流模型中,且由于入水量恒定,水流模态模拟存在一定误差。
为配合大比尺不规则波形潮汐实验,设计了一种变频调速系统,能精微控制河工模型出入水量,模拟实际潮位波形曲线,并且能实现多种运行模式。系统于2011年9月应用在长江科学院江苏省江阴临港经济开发区岸线调整工程防洪模型中,模型占地面积为630m2,对大通流量为61800 m3/s的洪峰大潮,以及反映枯期存在涨潮流时的大潮过程进行模拟,水位精度要求与实际测量值误差小于5 cm,模拟走波时间为30min。
1 控制系统总体设计
根据国内外类似潮汐河工模型控制系统的情况,以及大比尺模型自身特点,采用集散型结构。硬件主要由中央控制室的上位机、数据采集卡及分布在现场的光栅数字水位仪、专用通信接口、双向轴流泵和变频器等组成。将模型频率水位关系曲线和模糊PID控制补偿两者结合起来,开发有针对性的专业控制软件,构成功能完整的经济高效河工模型量测控制系统。模型控制系统总体布局如图1所示。

图1 模型控制系统总体布局
系统具体分解为自动生潮控制、手动控制、多点水位测量及流速流态测量子系统。各子系统由计算机独立进行功能处理,采用集散式控制,由管理级、监控级、控制级和现场级组成,其中管理级和监控级是独立的计算机,控制级包含变频器和单片机,分别控制反馈轴流泵转速与水位仪监测数据,设备之间通过 RS485网络连接、TCP/IP协议通信[2]。
2 控制系统硬件构成
根据大比尺河工模型扬程小、流量大和成本低等特点,可以采用水下式轴流泵反向回流变频调速方式。电气部分包括变频器、显示面板、继电器及接触器等。变频器调速公式为:

n为电机转速;n1为同步转速;f1为定子供电电源频率;p为磁极对数;s为异步电机转差率。
由式(1)可知,调节s,p,f1可以改变异步电机转速,其中变频调速能损低效率高、精度高以及平滑性好[3],易于实现生潮自动化控制。
为了克服现有的轴流泵不能双向抽水的不足,对原有的轴流泵产品进行结构改造,提供一种微扬程、大流量能正反2个方向抽水的回流水泵。把单向叶轮的不对称形状制作成对称的摆线S形状叶轮,将单向水流叶轮改为双向水流叶轮,如图2所示。当电机换向运转时,水流可随之反向流动,并且与传统双圆弧叶片相比,阻力、噪音明显减小,进一步提高了工作效率[4]。
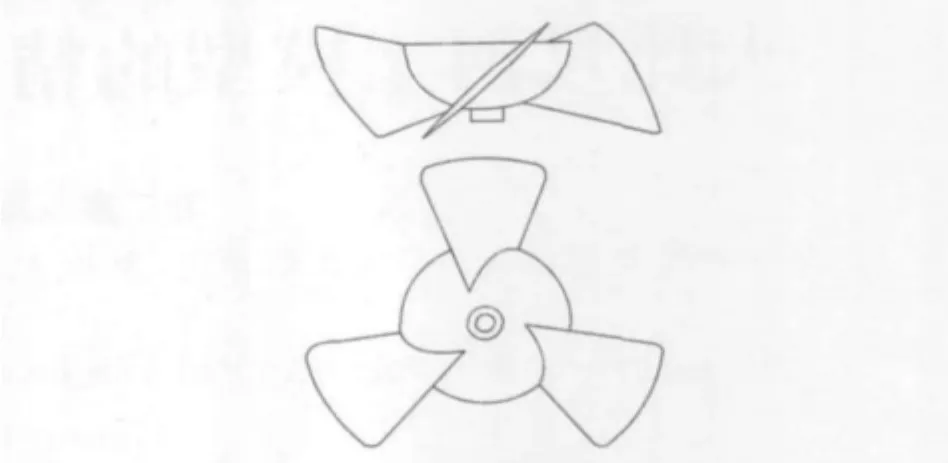
图2 双向水流叶轮
按照模型技术参数,选用单级卧式双向泵,流量Q=200L/s,扬程 H=2m,转速n=1450 r/min,有效功率P=3920 W。根据泵的特性曲线及多转速运行效率变化等因素影响,设计轮毂比d/D=0.467,叶轮直径615mm,叶片数Z=3,动力机用7.5kW三相交流异步电机。
现场调试过程中,变频器虽然距离河工模型有一定距离,但是线路之间有很强的电磁干扰而且露天工作环境复杂,所以保证准确的实时数据通信成为关键。线缆须采用屏蔽线,变频器与上位机的数据交换采用RS232/485互转通讯模块。根据轴流泵的负载特性和工作环境,选择iS5-LG变频器,设置频率范围、加减速方式等相应参数。
水位测量仪选用珠江水利科学研究院所研制的GS-4水位仪,其采用配有光栅编码盘步进电机连接小导程滚珠丝杠,将探针以300次/min的频率振动触水表面。测量精度为±0.01mm,探测速度>1.5 cm/s[5]。模型共监测整个流域的10处水位值,用RS485通讯协议将水位计测得数据传输到上位机,由控制系统软件处理实时闭环控制。
流速测量采用多通道光纤旋浆流速仪,不同断面多列流速仪数据矩阵同样通过RS485通信接口与上位机连接,达到全流域流场实时监测[5],上位机软件可以实现对应观测点与实际河流流速的对比,为局部水工模型修整提供准确数据。
3 控制系统软件设计
由于模型河道区与回流区之间存在水位差,以及轴流泵叶片之间存在不可避免的一定间隙,使得泵在低速或反向运转过程中水位下降的速度,远大于在高速正向运转中水位上升的速度,进而造成系统对泵的转速下降过于敏感,会出现变频器频率较小改变导致潮水位相对快速波动。潮水位波动滞后情况也随基准频率大小及其改变方向不同而不同,这样就造成传统控制在水位升降转折处的波动情况,或多或少超出大比尺模型限定的较小误差范围。
大比尺模型还受到自身精度及走波时间等因素限制,水惯性影响突出,而且为探究沿河预期工程的影响,实验采用的数据往往选择按一定安全系数放大的极端陡波;同时传统控制系统从启动到稳定入波往往需要较长时间。所以在软件设计中,采用模型频率水位关系插值曲线为基准,辅以模糊PID控制校正。
不同流量、波形条件对应的频率水位关系插值曲线也不相同,模型蓄水初始化阶段以及水位突变转折等极限情况,可以人工调节基准频率值做微校正,以扩大系统适应性及提高关键时刻精度。软件流程如图3所示。

图3 控制系统流程
河工模型单位时间水位升降所需的水量ΔQ决定了该时刻泵的转速变化,由式(1)得到变频器频率f变化,ΔQ由边界变化体积差值ΔQele和流速变化体积差值ΔQv组成,关系为:

ΔQele=A1×Δele;ΔQv=Δv(t)×A2;Δele为单位时间水位差;Δv(t)为截面流速变化值;A1为模型水表面面积;A2为测速点截面面积。在大比尺模型中河道水位改变较小,可以假定A1,A2为常数,水泵的流量与口径、河道区与回流区之间水位差、水泵转速有关,轴流泵的扬程小,对河道区与回流区之间水位差十分敏感。根据水力学[6]原理,管道流量与所连接的箱内水位差的平方根和管道横截面积成正比,河工模型流量与水位差可以近似为:

A为轴流泵口径面积;z为河道区与回流区之间水位差;μ为流量系数。轴流泵口径面积、流量系数和重力加速度为已知常数,可跟据不同的河工模型试验确定,所以式(3)可以把流量转化为水位差。
为了进一步确定变频器频率与水位差的关系,在江阴临港经济开发区岸线调整工程防洪河工模型中,依次设定变频器以固定频率10Hz,15Hz,20 Hz,25Hz,30Hz,35Hz驱动轴流泵,记录对应稳态水位差。模型中回流区水位恒定,水位差进而可以作为河道的水位数据。将采集到的点通过三次样条插值,得到该河工模型频率与水位之间的关系曲线,软件依据此关系曲线,由预模拟波形理论水位得到基准频率值fJZ,再以实时水位与理论水位差对该频率值加上模糊PID微调频率fPID,变频器实时接收到的频率值fs与它们关系为:

三次样条插值有较好的计算稳定性和收敛性,同时二阶导数连续,因此具有非常好的光滑性[7],其在各个区间上的表达式为:

hi=xi+1-xi,Mi为待求解常量。
fJZ的三次样条插值求解的程序算法步骤为:
a.输入固定频率实验得到的插值结点,a=z1<z2<…<zn=b,对应频率值为f1,f1,…,fn,求zL(k)对应的fJZ(k)。


e.用追赶法求解对角占优阵方程组,得到各区间si表达式。
f.判断理论水位zL(k)所在区间,计算fJZ(k),重复步骤f。
模糊PID调节程序由模糊参数调节器和标准PID控制器组成,以实际与理论水位差及其变化作为输入量,通过调节器在线对控制器的参数调节,实现系统最佳状态[8]。fPID的模糊PID求解的程序算法步骤为:
a.读取水位计第K时刻实际水位值zs(k)。
b.计算误差e(k)=zL(k)-zs(k)和变化率ec(k)=e(k)-e(k-1)。
c.将e(k),ec(k)模糊化。
d.模糊整定PID控制器参数kP,kI,kD。
e.计算控制增量 ΔfPID(k),fPID(k)=fPID(k-1)+ΔfPID(k)。
f.输出fPID,重新赋值e(k-2)=e(k-1),e(k-1)=e(k),fPID(k-1)=fPID(k),返回步骤a。
4 系统测试及结果
江阴临港经济开发区岸线调整工程防洪河工模型试验的范围上起太平洲的尾部,下至江阴河道的鹅鼻嘴上游约5km的四圩港,全长35km。根据试验目的和以往类似试验研究的经验,确定模型平面比尺αL=500,垂直比尺αH=100,模型变率η=5。模型进口以上有扭曲水道,模型出口有设备模拟水流条件。模型设计制作依据20 09 年10 月实测的1∶10000 河道地形图[9]。定床模型的各项比尺详如表1所示。

表1 定床模型比尺表
验证试验结果表明,七圩港、阳码头和申港等水尺的全潮潮位过程模型值与实测值基本吻合,其误差小于3cm,相位变化也吻合较好;八条垂线流速过程验证中,潮流相位变化验证较好,验证流速大小误差可控制在0.1m/s范围内。总体来看,模型潮位过程、潮流速过程与天然条件下的潮位、潮流速过程吻合较好,完全满足河工模型试验规程的要求。上游各观测点潮位过程验证结果如图4所示。
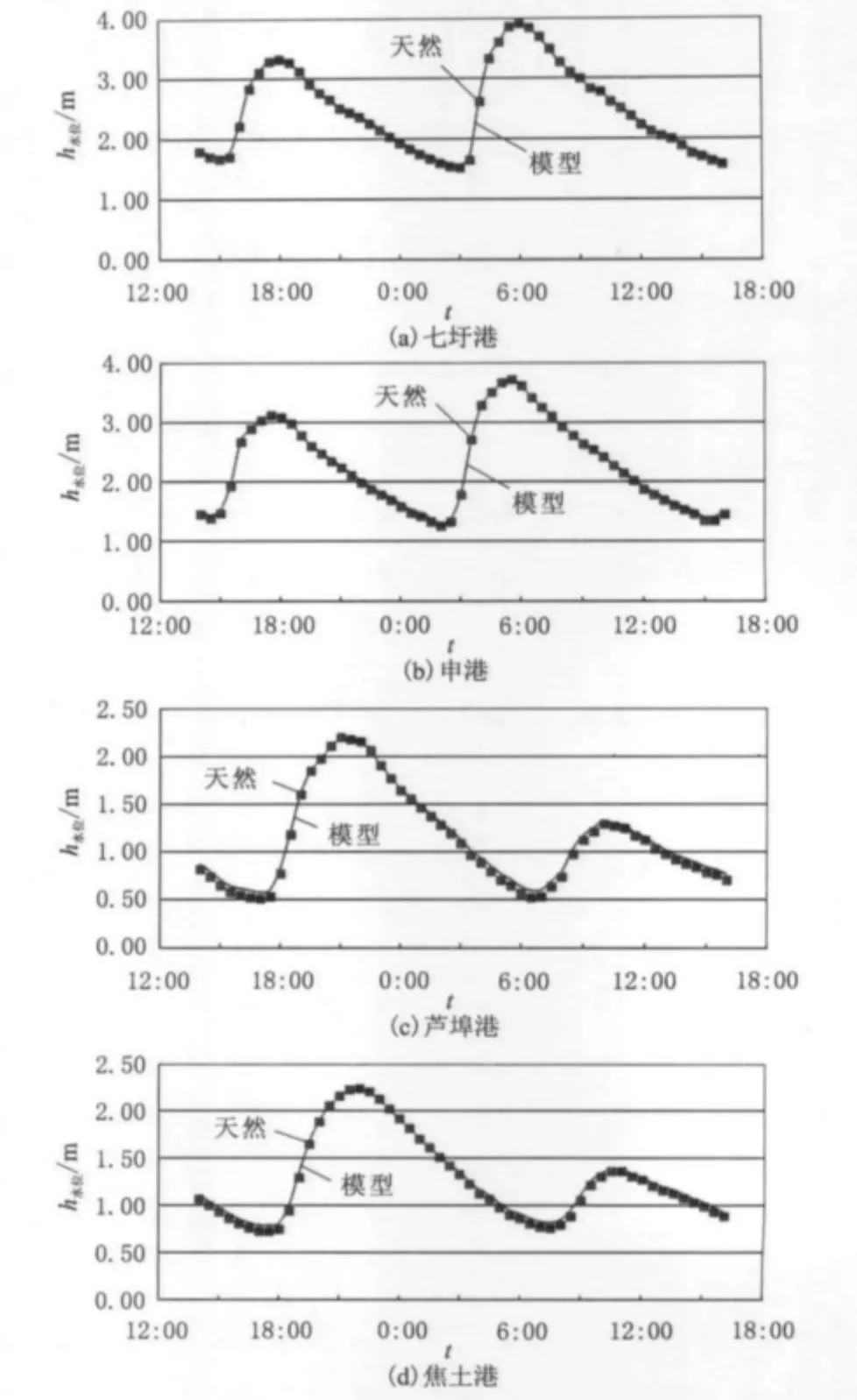
图4 上游各观测点潮位过程验证结果
5 结束语
控制系统以模型量身定制的关系曲线进行编程,结合模糊PID控制,确保了试验结果的精确可靠,满足大比尺模型试验的高灵敏度特性。而且系统具有施工方便、成本小和可以二次利用等优点。在以后的工作中,要进一步完善针对不同水工模型获取各自有效关系曲线的实验标准;进一步探讨关于极限波形如骤升的急浪回涌等情况的系统自识别的实现方法,积累各种极限情况对应的调控经验方程,完善软件开发,提高系统自动化程度。
[1]刘其奇.流量控制型潮汐控制系统[J].测控技术,2001,20(5):38-40.
[2]吴昌林,沈 敏,林木松,等.应用变频调速的潮汐模拟系统[J].现代制造工程,2006,(8):85-88.
[3]许美满.模糊PID在生潮控制系统中的应用研究[D].武汉:华中科技大学,2008.
[4]长江水利委员会长江科学院.双向回流泵[P].中国专利:ZL 200820066427.1,2009-01-14.
[5]吴新生,沈 敏,廖小永.深圳河口潮汐模型变频生潮与量测控制系统[J].长江科学院院报,2010,27(4):5-10.
[6]吴持恭.水力学[M].北京:高等教育出版社,2003.
[7]刘师少.计算方法[M].北京:科学出版社,2005.
[8]Parnichku M,Ngaecharoenku C.Hybrid of fuzzy and PID in kinematics control of a pneumatic system[C].Proceedings of the 26th Annual Conference of the IEEE Industrial Electronics Society ,IECON 2000,2000,2.1485-1490.
[9]冯 源,杨光荣,崔占峰.江苏省江阴临港经济开发区岸线调整工程防洪评价报告[R].武汉:长江科学院,2011.
猜你喜欢
水泵技术(2022年1期)2022-04-26
防爆电机(2021年5期)2021-11-04
防爆电机(2020年3期)2020-11-06
开封文化艺术职业学院学报(2020年11期)2020-01-09
测控技术(2018年5期)2018-12-09
求学·理科版(2018年5期)2018-05-26
电子制作(2017年7期)2017-06-05
设备管理与维修(2016年6期)2016-03-16
求是学刊(2015年5期)2015-09-11
黑龙江史志(2014年1期)2014-11-11