“北斗”导航系统和无线电台在无人机监控系统中的应用❋
2013-06-27 05:50王尔申张述杰雷虹孙延鹏
电讯技术 2013年7期
王尔申,张述杰,雷虹,孙延鹏
(1.沈阳航空航天大学电子信息工程学院,沈阳110136;2.电磁环境效应航空科技重点实验室,沈阳110035)
“北斗”导航系统和无线电台在无人机监控系统中的应用❋
王尔申1,❋❋,张述杰1,雷虹2,孙延鹏1
(1.沈阳航空航天大学电子信息工程学院,沈阳110136;2.电磁环境效应航空科技重点实验室,沈阳110035)
针对GPS系统为美国军方控制的现状,研究了以我国已具备区域导航定位的能力的“北斗”卫星导航系统和无线数传电台为核心的无人机状态监控系统。系统以MSP430系列处理器为控制单元,利用UM220“北斗”导航接收机获取无人机的状态信息,通过无线数传电台EL805将机载信息发送至地面监控中心以及接收地面监控中心的控制指令,并利用虚拟仪器软件LabVIEW开发无人机监控平台,实现无人机飞行姿态的监控。引入范数的概念对“北斗”导航定位性能进行分析。实验测试表明,该系统运行稳定,人机交互界面良好,信息化程度较高。本研究对摆脱GPS,利用“北斗”实现无人机和通用航空飞机的导航和监控具有一定的参考价值。
无人机监控系统;“北斗”导航系统;数传电台;监控软件设计
1 引言
无人飞机(UAV),包括无人作战飞机(UCAV)是当今世界军用武器发展的一个热点。由于无人机具有低成本、轻结构、高隐身、长航时等特点,并且是以无线电遥控或由自身程序控制为主的不载人飞机,能携带各种任务载荷,其在军用和民用领域都有广阔的应用[1]。在无人机各系统中,作为关键技术之一的导航系统,为其实现自主飞行、完成各种作战任务提供了重要保证。国外无人机一般采用GPS与其他导航系统组合来实现导航,如美国“全球鹰”和“捕食者”都采用惯性/卫星组合导航系统。由于GPS由美国国防部控制,其他国家采用GPS在很多方面都受制于人,尤其在未来战争应用中会存在巨大的潜在危险[2]。
BD-2卫星导航系统于2012年12月27日起正式提供导航服务,服务范围涵盖亚太大部分地区,提供定位、测速、授时服务,定位精度为10 m,测速精度0.2 m/s,授时精度50 ns。“北斗”二代导航系统在测绘、交通以及低空空域监管系统中都有广泛的应用前景[3-4]。
本文以研究的无人机为应用背景,对“北斗”和无线数传电台构成的无人机状态监控系统软硬件进行了设计,系统具有低功耗、重量轻、便于扩展的特点。同时,由于采用的LabVIEW软件设计地面站,具有开发灵活方便、界面丰富等特点。设计的监控系统在我校通用航空重点实验室研究的无人机测试中进行了应用。
2 无人机状态监控系统的整体设计
无人机状态监控系统主要是采集飞机的飞行姿态参数、传感器状态以及执行机构的参数,并在地面监控中心对相关信息处理后,发送相关指令控制飞机执行相应的任务等。其组成主要包括电源系统、机载系统和地面系统,机载系统包括数据链路、“北斗”导航接收机等;地面系统包括地面控制站(数据链路终端、地面站配套软件及硬件),完成与机载系统的数据通信。系统各个组成部分通过总线进行通信,机载系统与地面系统通过无线链路进行通信[5]。系统组成框图如图1所示。分别供电,需要多个电源转换器进行电压转换。本电源电路将锂电池输出的28 V电压通过开关电源转换为12 V电压,采用线性稳压器得到5 V电压,为“北斗”接收机和数据链电台提供电源。在电源设计时采用滤波和吸收方法来抑制电源引入的干扰[6]。主控模块是机载终端的核心,负责完成定位数据采集与传输控制模块工作,设计中选择功耗较低以及有良好可扩展性的TI公司的MSP430F149微控制器。
定位模块为机载终端提供有效准确的位置、状态信息。考虑到目前GNSS四大系统GPS、GLONASS、GALILEO和Beidou的实际情况,设计中选择我国自主研发的“北斗”卫星导航接收机作为导航定位接收模块。目前我国“北斗”卫星导航系统已发射16颗卫星,覆盖范围包括我国全境在内的亚太大部分地区,除了具有导航定位授时功能外,“北斗”系统还具备双向短报文传输功能,有利于系统功能的扩展。本设计中选用UM220型号的“北斗”导航OEM模块,此模块通过RS232串口与主控模块进行数据通信。
无线数传电台在无人机系统中占有非常重要的地位,用于实现无人机和地面站之间的信息传输。采用MDS的TransNET900的EL805,该模块采用跳频扩频技术,具有接收灵敏度高、抗干扰和保密性强的特点。同时,无线数传模块EL805可进行组网设计,有利于实现无人机编队控制,具有较强的扩展功能。
2.2 地面站系统的设计
地面站主要由无线数传电台和地面站计算机组成,并配备地面站系统软件。其中,地面站软件基于LabVIEW软件开发而成,实现包括飞机状态监控、航迹规划、电子地图、指令发送、状态监测等功能。本文只涉及飞机状态监控软件的设计。地面站选用的无线数传电台与机载终端无线电台相同,在工作中需要对其进行设置,关于无线数传电台的设置在文中第4部分中进行说明。

图1 无人机监控系统原理框图Fig.1 General architecture of the UAV monitoring system
3 LabVIEW地面站监控软件设计
2.1 机载终端系统的设计
机载终端由主控模块、定位模块、数传模块和电源模块组成。机载系统中电子设备的种类繁多,设备内部电路的供电需求各异,加上大电流与小电流电源
无人机地面站监控软件依托由美国国家仪器公司推出的虚拟仪器软件LabVIEW设计而成,Lab-VIEW软件突出特点是图形化编程环境,编程方便,界面友好直观。利用LabVIEW设计的软件处理程序实现多种功能,包括串口通信、接收数据以txt格式存储、飞行参数显示、“北斗”定位可用性计算、定位精度评价参数显示及地面指令发送等。
图2和图3给出了无人机地面站监控软件的部分LabVIEW程序框图。LabVIEW的函数库中提供了串口的操作控件,可实现串口的读写等操作。在对串口进行读写操作之前,先对串口进行配置,包括串口号、波特率、数据位、校验位、停止位等。图2给出了利用串口控件设计的串口通信程序。图3对北斗接收机输出的$BDGGA语句进行参数提取,将获取的经纬度、可用星数量以及高度信息显示在软件的前面板文本框中。
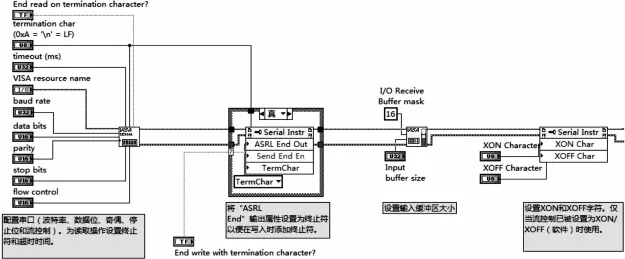
图2 串口通信程序框图Fig.2 Block diagram of serial communication program
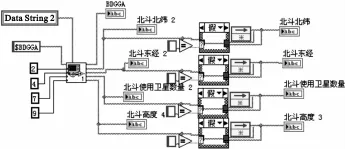
图3 飞行参数获取与显示程序框图Fig.3 Block diagram of the flight parameters acquisition and display program
无人机地面监控软件LabVIEW前面板如图4所示,图中给出了获取的Beidou接收机相关参数的显示结果,包括显示当前的定位状态、经纬度、高度、速度、时间、日期、可见卫星数及用于定位的卫星数目、几何精度因子(DOP)值。同时,可以分析“北斗”导航系统的定位可用性等参数值,可以实时了解Beidou导航定位系统的定位性能。
Beidou定位的可用性通过计算一维定位、二维定位、三维定位时间的百分比,即可以得到Beidou信号的可用性。Beidou分别处于一维定位、二维定位、三维定位的状态下以存储数字1、2、3来代表工作状态。设所存储的Beidou的工作状态为列矩阵T,例如T=[3 3 3 3 2 1 3 3 2 2 3 3 3…3 1 3],一维定位、二维定位、三维定位分别为x、y、z,设列矩阵T求和即∑T为b,T的1-范数为a,2-范数为c。则根据范数的数学定义可以得到定位状态的方程为
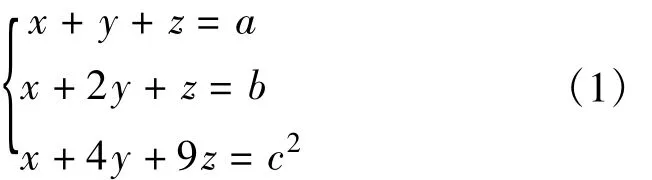
由此可以求出x、y、z:

则Beidou信号的可用性为


图4 地面站监控软件平台界面Fig.4 Running result of the front panel of ground station monitoring software
4 系统的调试
无线数传电台EL805上有PWR、DCD、TXD、RXD 4个状态指示灯,其中,PWR信号灯为电源状态指示,DCD信号灯为电台工作状态指示,TXD信号灯为电台收到串口的数据并发送到空中,RXD信号灯为电台收到空中数据并送到串口。在应用EL805进行通信之前,需要对其进行设置。电台的配置采用上位机(PC机)通过专门的配置软件MDS TransNET Radio Configuration进行配置,上位机通过DB9口和电台DIAG接口连接。通过配置软件默认的窗口直接配置2个电台的参数,图5为电台参数配置界面,图6为经过正确配置后电源上电后电台处于同步状态。电台需要配置的主要参数为:
(1)工作模式:一个为MODEM(主机模式),另一个为MODE R(从机模式);
(2)通信波特率:设置为19 200 b/s,并保证主从电台的波特率要一致;
(3)网络地址:设置为1~65 000之间任意数字,注意主从机一定要相同;
(4)跳频时间:可以设置为7 ms、14 ms、28 ms,保持主从机设置一致。
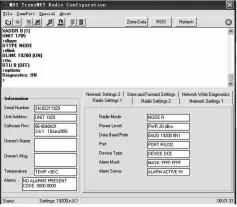
图5 电台参数设置Fig.5 Parameters setting of data transceiver

图6 电台同步状态Fig.6 Synchronization state of data transceiver
5 结论
文中采用我国自主研制的Beidou导航定位模块,通过无线数传电台,利用虚拟仪器软件LabVIEW研究并设计了无人机状态监控系统。功能测试结果表明:机载终端能够报告自身的位置等状态信息,可实现无人机飞行参数的显示、记录以及地面监控系统对无人机控制指令的传输。文中研究的无人机状态监控系统对进一步提高无人机导航系统的定位性能以及促进我国Beidou导航定位系统在无人机中的应用具有一定的意义。由于电台具有组网功能,可对利用多个电台组网进行远距离监控以及电台之间无缝切换确保数据不丢失等问题进行深入研究。
[1]Rosales J J,Toledo M,Bonardi L,et al.Development of a UAV Low-CostNavigation System Prototype for ATM Applications[C]//Proceedings of 2009 ION GNSS.Savannah,Georgia,USA:ION,2009:1-9.
[2]Kaplan E,Hegarty C.Understanding GPS:Principles and Applications[M].2nd ed.MA,US:Artech House,2006:239-264.
[3]刘纪红,王倩倩,杨丽.“北斗”卫星导航系统在低空空域监管系统中的应用[J].电讯技术,2012,52(1):18-22. LIU Ji-hong,WANG Qian-qian,YANG Li.Application of Beidou Satellite Navigation System in Low-altitude Airspace Supervision System[J].Telecommunication Engineering,2012,52(1):18-22.(in Chinese)
[4]宁津生,姚宜斌,张小红.全球导航卫星系统发展综述[J].导航定位学报,2013(1):3-8. NING Jin-sheng,YAO Yi-bin,ZHANG Xiao-hong.Review of the development of Global Satellite Navigation System[J].Journal of Navigation and Positioning,2013(1):3-8.(in Chinese)
[5]王尔申,张芝贤,孙延鹏,等.复合材料无人机航电系统的改进设计[J].电讯技术,2012,52(9):1548-1552. WANG Er-shen,ZHANG Zhi-xian,SUN Yan-peng,et al.Improved Design of Avionics for Composite Material UAV[J]. Telecommunication Engineering,2012,52(9):1548-1552.(in Chinese)
[6]王尔申,张淑芳,雷虹,等.复合材料无人机电磁兼容设计[J].电讯技术,2011,51(11):107-111. WANG Er-shen,ZHANG Shu-fang,LEI Hong,et al.Electromagnetic Compatibility Design of a Composite Materials UAV[J].Telecommunication Engineering,2011,51(11):107-111.(in Chinese)
Application of Beidou Satellite Navigation System and Data Transceiver in UAV Monitoring System
WANG Er-shen1,ZHANG Shu-jie1,LEI Hong2,SUN Yan-peng1
(1.School of Electronic and Information Engineering,Shenyang Aerospace University,Shenyang 110136,China;2.Electromagnetic Environment Effect Top Laboratory of Aviation Industry,Shenyang 110035,China)
Due to the status of Global Positioning System(GPS)system under the control of USA DoD,the Unmanned Aerial Vehicle(UAV)monitoring system is studied,the core of which is China′s Beidou satellite navigation system and wireless data transceiver.The MSP430 processor is selected as the control unit.The UM220 Beidou navigation receiver is used to acquire the UAV status information.The wireless data transceiver EL805 is used to send onboard information to ground monitoring center and receive control command from ground control center.By using Laboratory Virtual Instrument Engineering Workbench(LabVIEW)software,the UAV status monitoring platform is developed to achieve the UAV flight status as well as the analysis of Beidou navigation positioning performance.Experiment results show that the system can work stably,and is featured by good man-machine interfaces,information and intellectualization.This study has some reference value for getting rid of GPS and taking advantage of Beidou to navigate UAV and general aviation aircraft.
UAV monitoring system;Beidou navigation system;data transceiver;monitoring software design
The National Natural Science Foundation of China(No.61101161);The Aeronautical Science Foundation of China(2011ZC54010);The Joint Funds of the Natural Science Foundation of Liaoning Province(No.2013024003)
the Ph.D.degree from Dalian Maritime University in 2009.He is now an associate professor.His research concerns GPS signal processing. Email:wes2016@126.com
10.3969/j.issn.1001-893x.2013.07.001
2013-03-02;
2013-05-02Received date:2013-03-02;Revised date:2013-05-02
国家自然科学基金资助项目(61101161);航空科学基金项目(2011ZC54010);辽宁省自然科学基金(联合基金)项目(2013024003)
❋❋通讯作者:wes2016@126.comCorresponding author:wes2016@126.com
V249;TN924
A
1001-893X(2013)07-0831-04

王尔申(1980—),男,辽宁辽阳人,2009年于大连海事大学获博士学位,现为副教授,主要从事GPS接收机信号处理算法研究。WANG Er-shen was born in Liaoyang,Liaoning Province,in 1980.He
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
载人航天(2019年1期)2019-03-07
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
童话王国·文学大师班(2017年12期)2018-01-31
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
航空模型(2016年5期)2016-07-25
新闻传播(2015年8期)2015-07-18
新闻传播(2015年12期)2015-07-18