
基于三电平SVM技术的船舶电力推进DTC研究
2013-07-12 05:57唐智星
舰船科学技术 2013年12期
李 彦,唐智星
(江苏科技大学电子信息学院,江苏镇江212003)
基于三电平SVM技术的船舶电力推进DTC研究
李 彦,唐智星
(江苏科技大学电子信息学院,江苏镇江212003)
介绍二极管钳位型三电平在中高压大中容量的船舶电力推进直接转矩控制(DTC)技术中的应用。针对船舶在低速运行时,控制系统存在低速时性能差以及二极管钳位型三电平固有的直流侧中点电压不平衡的问题,在u-i磁链观测器模型基础上,引入一种带定子电阻补偿的磁链观测器。研究基于双PI调节的电压空间矢量调剂技术(SVM)在系统中的应用。仿真结果表明,系统具有转矩响应快速、磁链观测准确性好、转矩脉动低等优点,能有效抑制三电平的直流侧中点电压不平衡,限制输出电压变化率并降低开关损耗。
船舶电力推进;直接转矩控制;三电平;空间矢量调制技术;定子电阻补偿
0 引言
直接转矩控制 (DTC)实现了在定子磁场定向的坐标系内对电动机转矩进行直接观测和控制。相对于二电平逆变器,二极管钳位型的三电平逆变器具有对器件耐压要求低、输出电压谐波较少、开关过程中输出电压变化率降低,电磁干扰少等优点。因此,在中高压大中容量的船舶电力推进中有着广泛的应用前景。但是,二极管钳位型三电平逆变器运用在船舶电力推进DTC这种低速大惯性的对象中,其低速性能较差,主要表现在以下几个方面:
1)直接转矩控制对定子磁链的观测一般采用u-i模型。在低速运行时,不能忽略定子电阻对磁链观测的影响。定子电阻的精确观测是改善系统低带性能的关键。
2)转矩脉动较大及开关频率不固定。
3)由于使用了二极管中点箝位,故还存在固有的直流侧中点电压不平衡的问题。
本文引入一种带定子电阻补偿的磁链观测器以提高磁链观测的准确性,采用基于双PI调节的三电平SVM技术DTC控制方法,降低转矩脉动并固化了开关频率,同时也有效地控制了中点电压。
1 三电平逆变器
二极管钳位型三电平逆变器的主回路结构如图1所示。图中各桥臂的S1~S4为可关断的IGBT管,Q1~Q4为续流二极管,D1和D2为钳位二极管。
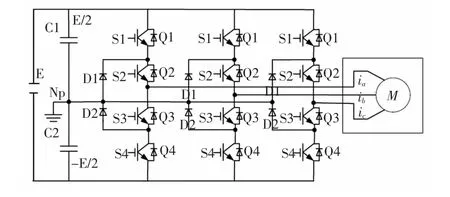
图1 三电平逆变器结构图Fig.1 The structure of three-level NPC inverter
通过控制各相 (S1~S4)IGBT管的开通和关断,每一相可获得3种不同的电平 (E/2,0,-E/2),用符号P,O,N表示。因此,三相共可获得3×3×3=27种空间电压矢量,电压矢量图如图2所示。
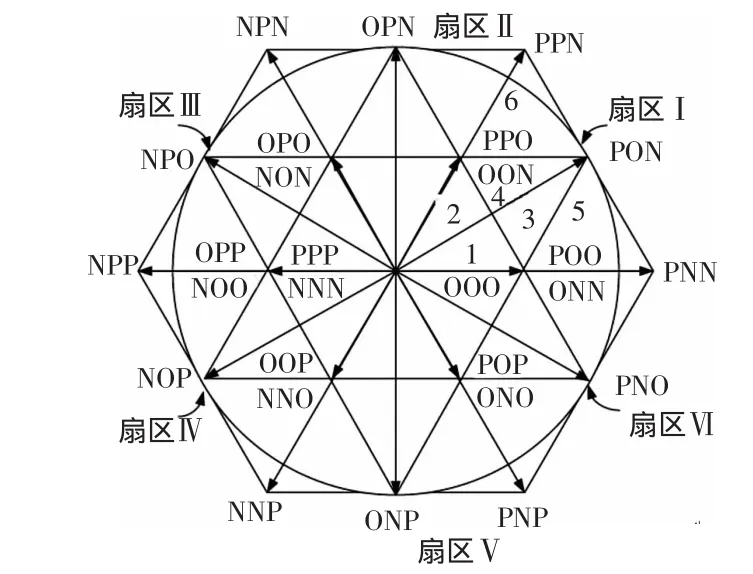
图2 三电平电压矢量图Fig.2 The voltage vector of three-level inverter
由图1和图2可看出,三电平逆变器中点电压不平衡是因为存在不为0的中点电流。本文中通过运用电压空间矢量调剂技术对中点电压进行控制,其控制策略是:因为大矢量和零矢量不会对中点电压产生影响,而中矢量和小矢量中点处都会有电流流过,因此它会带来中点电位的不平衡。其中每个小矢量都有2种开关状态 (正小矢量和负小矢量),而且这2种开关状态对中点电位的影响刚好相反。因此通过交替选择正负小矢量,合理安排正负小矢量的作用时间就可以实现简单控制。而中矢量通过其自身的对称性进行控制。
2 三电平电压空间矢量调剂技术
三电平SVM算法根据参考电压矢量合成的原则,分为区域判断、时间计算、时间状态分配3个步骤进行。
1)扇区和区域判断
区域判断的目的主要是找出合成参考电压矢量的3个基本矢量。根据三电平基本空间矢量图将整个矢量空间先分成6个大扇区,另外考虑到进一步的控制中点电压,将每个大扇区细分为6个小区域,如图2所示。并把靠近参考矢量的负小矢量选择为首发主小矢量,这样可以使在一个采样周期中起主要作用的小矢量成对出现,它们产生的中点电压影响可以相互抵消,减小了不平衡因素。
以大扇区1为例,将参考电压矢量在α-β坐标系上分解为usα和usβ,定义:

通过以下条件判断求得A,B,C的值:
如果u1ref>0,则A=1,如果u1ref<0,则A=0;
如果u2ref>0,则B=1,如果u2ref<0,则B=0;
如果u3ref>0,则C=1,如果 u3ref<0,则 C=0。
可由A,B,C的不同组合来判断参考电压usref所在的扇区,同时令:

通过判断,大扇区号S只可能取1~6之间的整数,这恰好与6个大扇区一一对应。
小区域的判断规则如下:
当θ≤30°时,参考电压在小区域n=1或3或5 内。若 usβ≤-usα+E/2,则在小区域n=1内;若 usβ≤-E/2,则在小区域n=5内;否则在小区域n=3内。
当θ≥30°时,参考电压在小区域n=2或4或6内。若 usβ≤ -usα+E/2,则在小区域n=2内;若usβ≥E/4,则在小区域n=6内;否则在小区域n=4内。
2)作用时间计算
判断出参考电压矢量所在的区域后,就可根据最近三矢量法找到合成参考电压矢量的3个基本矢量u1,u2,u3。以大扇区1的4个小区域为例,根据伏秒平衡方程有:
解得作用时间t1,t2,t3分别为:


其中 K=2usref/E为调剂系数。同理,可以求出参考电压矢量在其他区域时,基本矢量的作用时间。
3)时间状态分配
各组开关状态的作用次序要遵守的原则是:任意一次电压矢量的变化只能有一个桥臂的开关动作。
根据上述原则,每个采样周期以负小矢量作为起始矢量,采用中心对称的七段式法,大扇区1的作用次序如表1所示,其中N,O,P分别表示对应三相为低电平、零电平、高电平。

表1 矢量作用顺序安排表Tab.1 The diagram of vector action sequence
三电平电压空间矢量调剂技术仿真如图3所示。
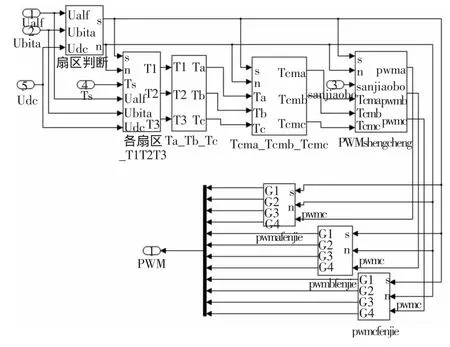
图3 三电平电压空间矢量调剂仿真图Fig.3 The simulation map of three-level SVM
3 基于PI调节电压空间矢量调剂技术的电力推进DTC系统实现
二极管钳位型三电平由于其自身电路结构上的特点,要在这种拓扑上实现直接转矩控制,将面临2个主要问题:一是电压矢量的选择问题;二是中点电压平衡问题。因此必须要综合考虑上述因素,而这些因素通常以一个整体出现,相互制约,很难将它们分开单独考虑。为解决这些问题,本文将基于双PI调节的电压空间矢量调剂技术引入到三电平DTC的控制中。将磁链和转矩的偏差通过2个PI调节器得到参考电压矢量在旋转坐标下的分量,然后再通过两相旋转坐标到两相静止坐标的变换得到在两相静止坐标的参考电压矢量分量。坐标变换的公式如下:

其仿真原理如图4所示。
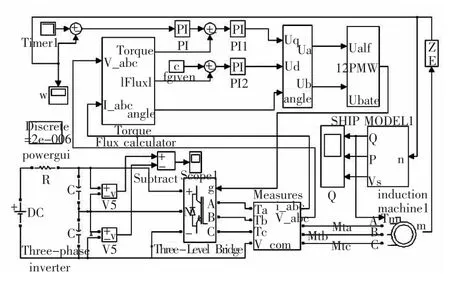
图4 基于双PI调节的三电平SVM技术电力推进Fig.4 SVM of electric propulsion DTC
4 定子电阻补偿器的实现
准确观测异步电机的定子磁链在直接转矩控制系统中至关重要。常用的电压-电流模型 (UI模型),电机在低速运行时,由于定子电阻上的压降分量增大,定子磁链的观测值并不准确,导致其在低速时磁链观测不准确,输出转矩脉动大,电流波形畸变等。本文所采用的改进算法思路如下:既然磁链观测的误差会造成磁链和转矩的偏差,那么反向思考一下,分别将磁链和转矩的偏差通过2个低截止频率的低通滤波器滤除高频成分,然后再通过2个PI控制器得到2个定子电阻的补偿值ΔR1和ΔR2,并以一定的比例混合后加上定子电阻的固定值Rs,就得到在线的定子电阻值Rs1,用这个动态变化的定子电阻值放在U-I模型中进行磁链观测。该补偿器可由下式描述:
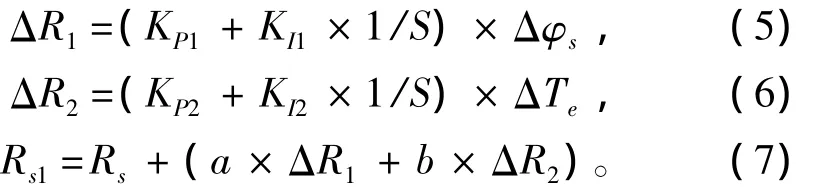
式中:Kp和KI分别为PI控制器的比例系数和积分系数;a和b分别为比例混合因子,分别取为0.6和0.4。其仿真原理模型图如图5所示。

图5 定子电阻补偿器原理图Fig.5 Stator resistance compensation
5 仿真结果分析
在Matlab/Simulink环境下搭建系统的仿真模型,船桨模型的参数设计为:螺旋桨直径D=0.38 m,船舶质量M=2.6 t,阻力系数Kr=0.1,海水密度ρ=1 025 kg/m3。船速和桨速是引起螺旋桨转矩和推力变化的2个主要因素,因此应将船和桨作为一个整体考虑。船桨系统的水动力特性可以下列方程描述:
螺旋桨的推力可表示为

螺旋桨的阻力矩可表示为

式中:Kp和Km分别为螺旋桨的推力系数和扭矩系数;n为螺旋桨桨轴转速,rpm;ρ为海水密度,kg/m3;D为螺旋桨盘面直径,m。由于Kp和Km都是进速比J的函数,可通过提供的离散实验数据进行曲线拟合的方法求得。
船舶的总阻力R基本与航速Vs的平方成比例,可由下式求得:

式中:Kr为阻力系数;Vs为船速。
船速由下式求得:

式中:m为船舶质量;t为推力减额系数。
船桨数学模型的发展框图如图6所示。
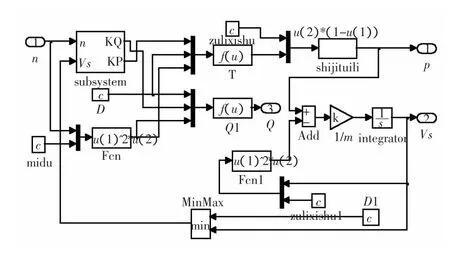
图6 船桨数学模型仿真Fig.6 The simulation model of ship propeller
系统参数的设计为:直流电压E=500 V,给定的定子磁链幅值为1.5 wb,给定转速为200 r/min,将螺旋桨的输出扭矩作为电机的负载转矩,仿真时间为25 s,仿真图如图4所示。可得到如图7所示的仿真波形。
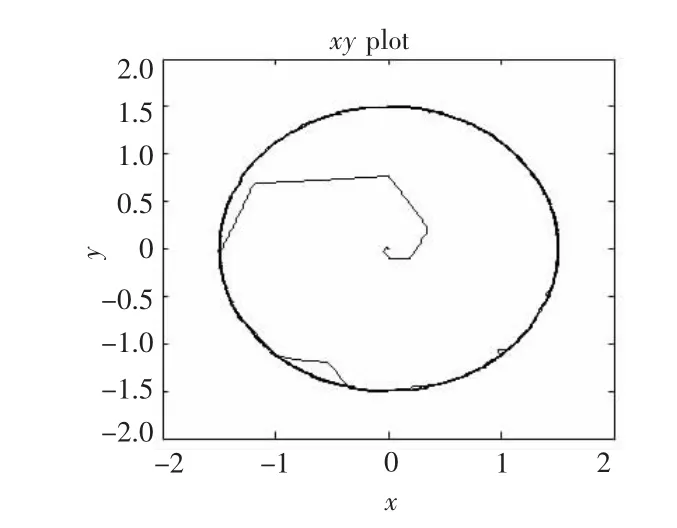
图7 传统U-I模型定子磁链轨迹Fig.7 The circular track of stator flux
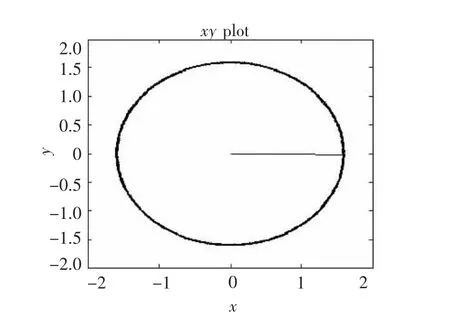
图8 定子电阻补偿的U-I模型的定子磁链轨迹Fig.8 The circular track of stator flux
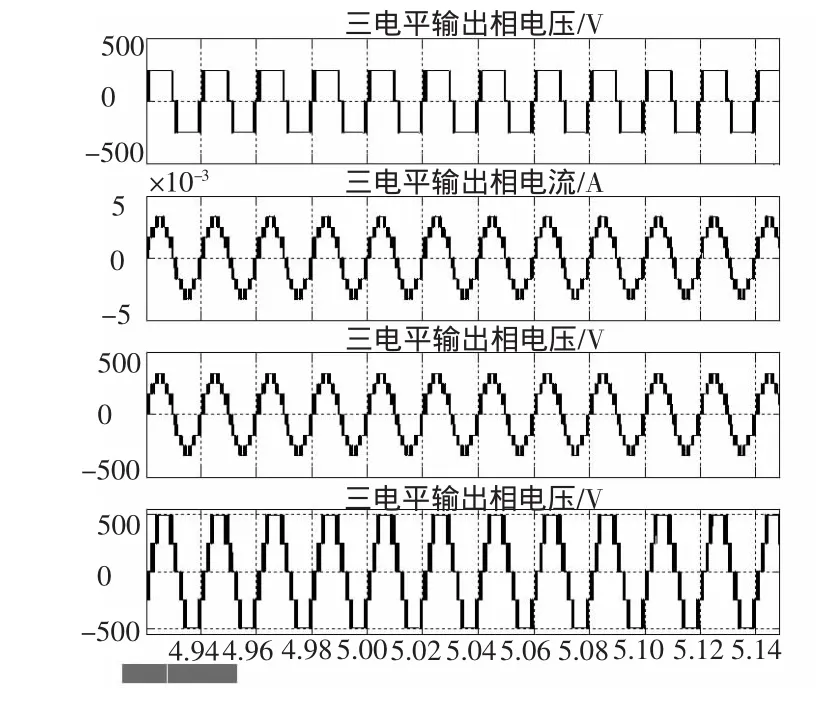
图9 三电平逆变器输出的电压、电流波形Fig.9 The map of voltage and current

图10 螺旋桨扭矩、推力、船舶转速波形Fig.10 The curve of propeller torque,thrust and ship speed waveform
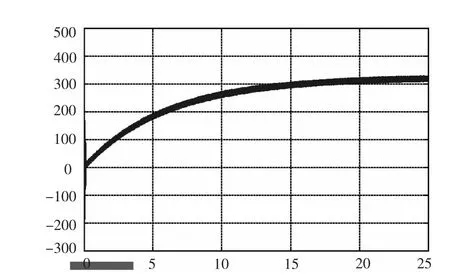
图11 电磁转矩波形Fig.11 The curve of motor electromagnetic torque
由仿真图9可知,三电平逆变器输出的相电压包括250 V,0,-250 V三种电平,线电压输出5种电平,输出的电流波形更接近正弦波,谐波较少。这与理论分析一致,同时也是采用三电平逆变器的优势。
由仿真图7~图8可知,采用SVM技术后,定子磁链的圆形轨迹都非常光滑,也都能稳定在给定的定子磁链附近。而引入了定子电阻补偿的定子磁链的圆形轨迹更为光滑,没有出现如图7那样的定子磁链内陷,同时磁链幅值的观测精度明显高于图7。由仿真图10和图11可知:系统在大约19 s时进入稳定状态,但是电磁转矩很好地跟踪了螺旋桨的扭矩特性,转矩脉动比较低,稳定后船舶的航速大约为32 kn。
6 结语
本文研究三电平DTC技术在中高压大中容量船舶电力推进中的应用,并具体研究了基于双PI调节器的三电平SVM技术。同时,研究了定子电阻补偿器对磁链观测进行改进。实验结果表明定子电阻补偿器能显著的改善定子磁链观测的精度;基于三电平SVM技术的电力推进DTC能实现将中低压的可关断IGBT管运用在中高压大中容量的船舶电力推进中,并具有响应快、转矩脉动低、磁链观测的准确性好等特点,具有一定的适用价值。
[1]BIRD I G,ZELAYA H.Fuzzy logic torque ripple reducetion for DTC based AC drives[J].Electron Lett,1997,33(17):1501-1502.
[2]DIAMANTIS G,PROUSALIDIS J M.Simuliation of ship propulsion system with DTC driving scheme[J].The Institution of Electrical Engineers,2004(6):562 -564.
[3]VASUDEVAN M,ARUMUGAM R.Induction motor for electric propulsion systems[J].India.LAS,2004(5):2728-2737.
[4]LINSHI X,MOREL F,LLOR A M,et al.Implementation of hybrid control for motor drives[J].IEEE Transactionson Power Electronics,2007,54(4):1946 -1952.
[5]NASH J N.Direct torque control of induction motor vector control without an encoder[J].IEEE Trans,1997(5):34 -39.
[6]LIU Shu-xi,WANG Ming-yu,et al.A novel fuzzy direct torque control system for three-level inverter-fed induction machine[J].International Journal of Automation and Aomputing,2010,7(1):78 -85.
Research on ship electric propulsion DTC system based on three-level inverter of SVM algorithm
LI Yan,TANG Zhi-xing
(Jiangsu University of Science and Technology,School of Electronic and Information,Zhenjiang 212003,China)
The applications of neutral-point-champed three-level inverter in ship electric propulsion DTC with middle-high voltage and big capacity has been introduced in this paper.According to the poor performance at low speed in ship electric propulsion,a new flux observer with stator resistance compensation was presented based on U-I flux observation model.At the same time,SVM algorithm based on double PI regulator has been used in this system.The simulation results show that the low speed performance and dynamic performance can be improved significantly and it has good accuracy of flux observation,also it can effectively control the neutral point voltage.
ship electric propulsion;direct torque control;neutral-point-champed;three-level inverter;space vector modulation;stator resistance compensation
TM311
A
1672-7649(2013)12-0032-05
10.3404/j.issn.1672-7649.2013.12.007
2012-11-06;
2012-12-14
李彦(1959-),男,副教授,研究方向为智能控制和船舶电气。
猜你喜欢
微电机(2022年8期)2022-10-12
南北桥(2022年2期)2022-05-31
传感器与微系统(2022年3期)2022-03-23
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
微电机(2020年7期)2020-08-01
微特电机(2019年7期)2019-08-02
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
电脑知识与技术·经验技巧(2017年9期)2018-02-24

- 舰船科学技术的其它文章
- 最小平均等待时间约束下的备件库存优化模型