
踝关节康复机构的研究
2013-08-28 06:03侯娅品程秀芳
华北理工大学学报(自然科学版) 2013年2期
侯娅品,程秀芳,徐 千
(河北联合大学机械工程学院,河北唐山 063009)
在日常的关节损伤中,踝关节扭伤是创伤骨科中最常见的运动伤,近年调查显示,无论是成人还是青少年,踝关节损伤都较过去有明显上升的趋势。医学理论和临床医学证明,对于踝关节扭伤的治疗,除了早期必要的手术治疗和药物治疗外,后期正确的、科学的康复训练对于肢体运动功能的恢复和提高起到非常重要的作用。按摩是促进肢体运动功能康复的重要手段,但医师与患者间“一对一”的治疗过程十分繁重[1]。随着肢体运动功能障碍的患者逐年增多,各种各样的踝关节康复机器人应运而生,但已有机构大多训练踝关节某一个自由度,缺少多自由度的训练,不利于踝关节的全面康复。
踝关节共涉及伸屈、内外翻、内外旋三个自由度,其最主要的是伸屈、内外翻两个自由度,也是决定患者是否康复的最主要的两种运动。针对这一特点,提出了一种锻炼伸屈、内外翻两个自由度的卧式踝关节康复机构方案,该机构能够模拟踝关节的真实运动,对偏瘫、踝关节损伤患者进行康复训练,代替理疗师繁琐的人工训练任务。
1 机构方案
图1是该机构的设计方案,该康复机构基于两路传动系统:
当第一电磁离合器接合时,第二电磁离合器自动分离,形成第一条传动系统:伺服电机驱动谐波减速器转动,减速器带动直齿轮的主动轴转动,第一电磁离合器一端联接直齿轮的主动轴,另一端联接支撑板轴,在支撑板轴的带动下,支撑板和脚踏板作为一个整体上下摆动,踝关节固定在脚踏板上,随着脚踏板上下摆动(即内翻、外翻运动)。此时,这对直齿轮和和直齿轮的主动轴空转,两个锥齿轮、锥齿轮的主动轴、锥齿轮的从动轴、传动方杆均静止不动。
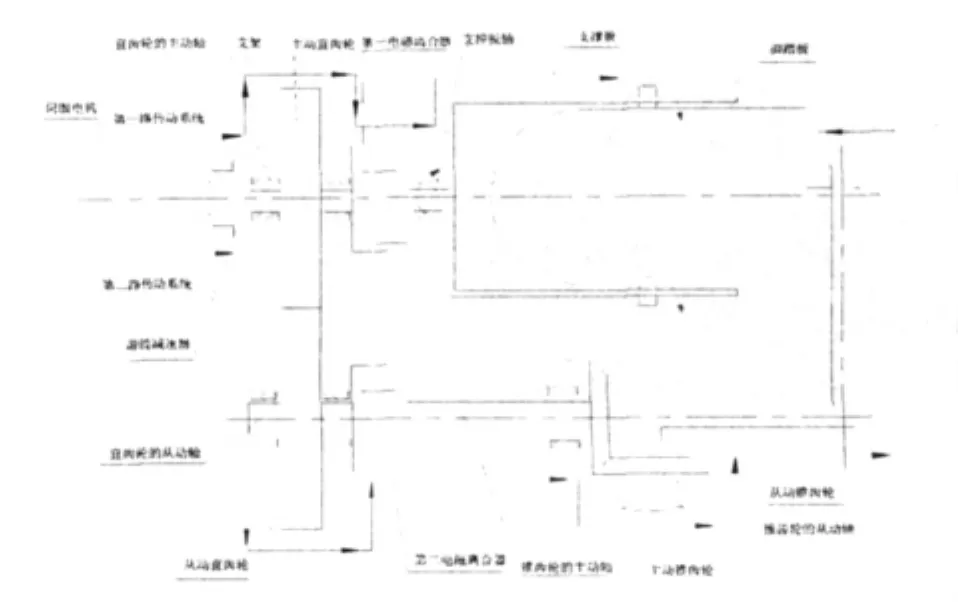
图1 踝关节机构方案简图
当第二电磁离合器接合时,第一电磁离合器自动分离,形成第二条传动系统:伺服电机驱动谐波减速器,减速器联接直齿轮主动轴,主动直齿轮带动从直齿轮转动;第二离合器一端联接直齿轮的从动轴,另一端联接锥齿轮的主动轴,在锥齿轮主动轴带动下,主动锥齿轮开始转动,并带动从动锥齿轮完成空间90°传动;传动方杆一端与锥齿轮从动轴固定联接,另一端加工一通孔,与脚踏板的中间轴套在一起;在锥齿轮的带动下,传动方杆不断左右摆动,从而带动脚踏板在支撑板中前后摆动。踝关节固定在脚踏板上,随着脚踏板前后摆动(即伸屈运动)。此时,支撑板轴和支撑板静止不动,且支撑板作为脚踏板的支撑,使脚踏板在支撑板内左右摆动。
2 机构本体的设计
2.1 踝关节运动角度和摆动速度
踝关节设计角度要大于正常走动的角度而又小于人体极限的摆动角度[2],如此才能保证实现人体正确步行轨迹,又能保证安全,如表1所示。

表1 踝关节运动范围
按照理疗师的要求,在大于6s的时间内完成背伸、跎屈运动,背伸0~20°,跎屈0~25°,那么按照要求,伸屈的角速度为

内外翻的角速度为

按照较大的伸屈角速度确定脚踏板的转速

2.2 电机的选型
调查一批正常人和一批脑卒中偏瘫患者分别进行背伸、跎屈,外翻、内翻两个自由度关节所需的力矩值[3],踝关节伸屈运动所需的力矩最大值为M=25 Nm
因此,驱动脚踏板所需功率为

考虑到运动过程中有功率损耗,故留出1.5倍余量,背伸/跎屈时,电机所需功率为

根据电机的功率、扭矩,选择决定选用选择松下A5交流伺服电机:额定输出功率为50 W,额定转矩0.16 Nm,额定转速3000 r/min。设定该伺服电机的输出转速为400 r/min,其减速比为160。
2.3 谐波减速器的选型
单独使用一个电机输出的转矩太小,需用减速器来增大扭矩,所以伺服电机后加一个减速器。综合考虑各种减速器的特点,最终决定选用减速比高、体积小的电机直联型谐波减速器。故驱动元件选择交流伺服电机+谐波减速器的方式,来提供输出力矩。
根据减速比和扭矩的要求,选择日本的Harmonic Drive LLC的CSF Series Ratings系列的型号为20的谐波减速器:减速比160,额定扭矩40 Nm。该减速器的两端均为孔式输出(输入),因此省去了联轴器,减小了空间尺寸。
2.4 确定脚踏板尺寸
脚踏板尺寸是根据人足的实际尺寸来确定的。据调查,50%的女性足长为240 mm左右,50%的男性足长为260 mm左右。为适合所有人群,确定脚踏板的长度为280 mm,并根据人脚的长宽比例,宽为160 mm。并由此确定支撑板尺寸。
2.5 确定系统尺寸
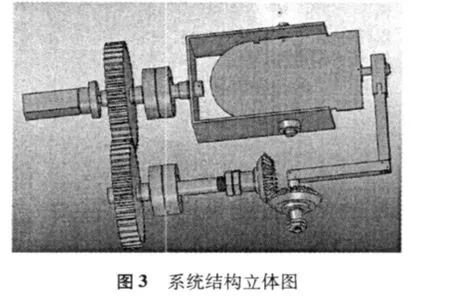
由电机输出转速和减速器减速比可知,该传动系统的传动比为1。设计框架结构及尺寸图如图2所示,图3为三维立体图。
从尺寸图中可以看出,传动系统由一对直齿圆柱齿轮、一对锥齿轮组成,这两对齿轮传动比均为1,按照结构尺寸需要,直齿轮的直径为200 mm,锥齿轮的直径为100 mm。

2.6 开式圆柱齿轮设计
已知:传动比i传=1,根据系统结构尺寸图知,齿轮直径d1=d2=200 mm,输入功率P直齿=P电机η减=9.8 × 0.97 ≈9.5 W,输入转速 n直=2.5 r/min,载荷平稳,转速低。
1)根据以上条件及系统结构尺寸图,设计齿轮主要参数:模数m=5 mm,z1=z2=40,d1=d2=200 mm,
2)验算齿轮的弯曲强度
考虑到该康复机为小型低功率、低转速机械,根据查表,两个均齿轮选用45钢正火,平均齿面硬度为200HBW,选用8级精度。

故σF<[σF]=375 MPa,故这对齿轮强度足够,合格。
2.7 开式锥齿轮的设计
已知:传动比i传=1,根据系统结构尺寸图知,锥齿轮齿轮齿宽中点分度圆直径d1=d2=100 mm,输入功率 P锥齿=P电机η减η直=9.8 × 0.97 × 0.97≈9.2 W ,输入转速 n锥=2.5 r/min,载荷平稳,转速低。
1)根据上述条件及系统结构尺寸图,设计锥齿轮的主要参数:大端模数m=4 mm,大端分度圆直径d1=d2=100 mm,齿数z1=z2=25
其他参数:分锥角δ=90°,齿宽b=21 mm,齿宽中点分度圆直径dm1=dm2=85 mm,锥距R=70.711 mm,当量齿轮分度圆直径dv1=dv2=120 mm,当量齿轮模数mm=3.4 mm,当量齿数比uv=1,当量齿数zv1=zv2=34>17,故该锥齿轮不会发生根切。
2)验算开式锥齿轮的弯曲强度

故σF<[σF]=375 MPa,故这对锥齿轮强度足够,合格。
2.8 电磁离合器的选择
本课题选用两个电磁离合器,两个离合器的转速均为n离=2.5 r/min,传递的扭矩为M=25 Nm,所联接的两个轴的直径均为φ25 mm。
根据传递的扭矩、转速以及所联接轴的直径,以及负载特性、使用条件、使用环境,最终选用DLM5系列有滑环湿式多片电磁离合器。该离合器的规格和参数:额定动转矩25 Nm,额定最高转速3000 r/min。
驱动脚踏板的力矩为M=25 Nm,在电磁离合器的额定动转矩25 Nm之内。故满足要求。
3 结论
本文设计了一种新型的卧式踝关节康复机构,通过接合不同的电磁离合器,控制踝关节进行伸屈或是内外翻的康复训练。该机构能够模拟踝关节的真实运动,可对偏瘫、踝关节损伤患者进行康复训练,从而代替理疗师繁琐的人工训练任务。
[1]姚美霞,朱小红,池月英,唐秋芳,等.电动踝关节功能康复仪预防和矫正足下垂的效果观察[J].中国实用护理杂志,2007,23(4):16-18.
[2]余伟正,钱晋武.步行康复用踝关节系统的研究[D].上海大学,2009,20-58.
[3]张煜,陈鹰,杨灿军.踝关节康复医疗外骨骼系统开发研究[D].杭州:浙江大学,2010:30-31.
猜你喜欢
铁道通信信号(2019年10期)2019-11-25
军事文摘(2018年24期)2018-12-26
山东冶金(2018年5期)2018-11-22
创新作文(小学版)(2017年13期)2017-11-09
制造技术与机床(2017年3期)2017-06-23
发明与创新·大科技(2016年11期)2016-11-19
光学精密工程(2016年6期)2016-11-07
现代商贸工业(2016年35期)2016-04-09
汽车文摘(2015年4期)2015-12-13
山东工业技术(2015年15期)2015-07-27
