
ADWR多普勒天气雷达伺服系统故障分析与处理
2013-09-03 10:50刘旭丹
黑龙江科学 2013年1期
韩 涛,刘旭丹
(1.黑龙江空管分局,哈尔滨 150079;2.黑龙江省科学院科技孵化中心,哈尔滨 150090)
民航机场多普勒天气雷达(ADWR)是由安徽四创电子有限公司设计、开发研制的新一代大型C波段全相参脉冲多普勒天气雷达[1]。它除了具有常规天气雷达探测降水回波的位置、强度等功能之外,还以多普勒效应为基础,通过测定回波信号与发射信号高频频率(相位)之间存在的差异,进一步得出雷达电磁波束有效照射体积内,降水粒子径向运动速度和速度谱宽,从而在一定条件下,反演出大气风场、气流垂直速度分布,以及湍流状况等。ADWR雷达能监测雷达四周400km范围内的气象目标,定量测量200km范围内气象目标的强度,检测150km范围内降水粒子群相对于雷达的平均径向速度和速度谱宽。它是分析中小尺度天气系统,警戒强对流危险天气,制作短时天气预报,保障民航飞行安全的强有力的工具。
笔者介绍了多普勒天气雷达伺服分系统的组成、工作过程,并通过笔者单位雷达使用过程中出现的伺服系统数据通信故障,分析多普勒天气雷达伺服系统的检修过程。
1 伺服系统的组成、工作过程
1.1 组成
伺服分系统由伺服控制板、方位驱动器、方位R/D变换板、俯仰驱动器、俯仰R/D变换板、本地控制键盘、显示面板、开关电源以及传动机构、传感器(旋转变压器)、伺服电机等组成,其组成框图如图1所示:

图1 伺服系统组织框图Fig.1 Servo control system block diagram
1.2 工作过程
伺服控制板是伺服分系统的核心电路,本控、遥控操作指令、天线位置信息和故障状态都送到伺服控制板,相应的软件对以上指令和数据进行运算处理,产生控制方位和俯仰电机运转的不同频率的脉冲信号,经过驱动器控制天线做相应的方位和俯仰扫描。方位和俯仰旋转变压器产生的代表天线方位角和仰角信息的信号,经方位和俯仰R/D变换板变换为14位二进制数字信号,回馈给伺服控制板,再送至信号处理分系统。
本控键盘与面板显示器用来对天线扫描运动进行本地控制并显示天线方位角和仰角位置。
开关电源电路产生+5V、±15V直流电压供伺服控制板和R/D变换板使用。
伺服分系统开机后,伺服控制软件首先对硬件电路进行初始化,判断有无故障,判断结果回馈给雷达监控分系统,若无故障则进入等待状态。收到本控或遥控指令后,经运算处理送出相应的脉冲信号驱动方位和俯仰电机指令要求的方式进行扫描运动。脉冲信号的频率决定电机的转数。电机当前运动方向、转速和所处的方位角、仰角位置也是伺服控制软件进行计算处理时的重要数据,例如天线正进行RHI扫描,仰角位置为15°且正在上升的时刻,如接收到仰角停止在10°的定位指令,软件会首先使俯仰电机减速、停机,然后再下降到10°的位置。

图2 伺服驱动器功能示意图Fig.2 Schematic diagram of servo drive function
2 伺服系统故障处理
2.1 故障现象
多普勒天气雷达运行过程中出现告警,显示“俯仰电源故障”,检查俯仰电源开关,为闭合状态;检查俯仰驱动器,驱动器数码管显示“21”。遥控关闭综合机柜电源开关,等待片刻,再重新打开综合机柜开关,故障恢复,但一段时间后,此故障又出现。
驱动器的输入输出信号连接方式
(1)控制信号的链接
经XP06接入驱动器的是来自俯仰R/D变换板上驱动接口电路送来的+15V工作电压、俯仰控制信号、俯仰驱动脉冲信号和向R/D变换板反馈的俯仰状态信号。俯仰控制信号连接示意图如图-3所示。
俯仰伺服开机:FYSFON开关闭合时动态制动被释放,开关断开时动态制动器起作用,伺服关闭,系统将切断电机电源,驱动器内部的偏差计数器被清零。
俯仰报警解除:FYA-CL开关闭合时报警解除,偏差计数器清零,系统回到运行状态。对于某些特定故障只能在排除故障重新接通电源之后才能解除报警,这些故障是过载(OL)、过流(OC)、编码器错误(ST)、系统故障、参数错误、CPU及DSP故障等。
俯仰控制方式选择:FYC-MOD开关闭合时通过参数设置可以选择一种控制方式。
俯仰零速钳位:FYZSPD断开此开关是内部和外部的转速命令都无效,输入驱动器的是零速度指令。天线准确定位之后,系统使用此信号可以排除外部转速信号、计数器偏差、R/D转换器漂移等因素对系统定位的影响。
俯仰逆时针驱动禁止FYCCWL,俯仰顺时针驱动禁止FYCWL。
2.2 故障分析
查看俯仰驱动器数码管,显示的“21”号报警,该故障报警是俯仰电机编码器(电机码盘)和俯仰驱动器之间通信错误代码。ADWR雷达的方位电机和俯仰电机采用松下电气公司生产的MINAS系列交流伺服电机MHM052A1,驱动器是与电机配套的全数字交流伺服驱动器MHD053A1V。驱动器接收伺服控制板和R/D变换板上驱动器接口电路送来的控制指令,包括天线转速转向指令、定位位置指令、控制方式选择指令等;接收电机附带的旋转编码器(码盘)送来的天线目前转速、转向等状态信息,经内部的运算处理最终产生驱动天线转动的驱动信号送往驱动天线扫描的方位电机和俯仰电机。如图2所示。
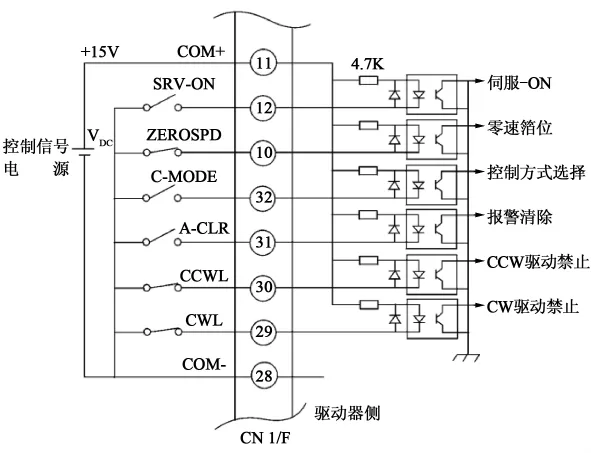
图3 俯仰控制信号连接示意图Fig.3 Schematic diagram of pitch control signal connection
(2)驱动脉冲信号的连接
俯仰驱动脉冲信号连接示意图如图4所示,控制俯仰电机转速的脉冲串差动信号FYPULS+和FYPULS-,控制俯仰电机转向的脉冲符号差动信号FYSIGN+和FYSIGN-.。

图4 俯仰驱动脉冲信号连接示意图Fig.4 The pitching driving pulse signal connection diagram
指令脉冲输入禁止FYINH高电平有效,用来禁止FYPULS和FYSIGN信号的输入。偏差计数器清零FYCLR低电平有效,用来清除偏差计数器,禁止指令脉冲的输入,禁止来自编码器的反馈脉冲的输入,清零信号脉宽应不小于30μs。
(3)反馈信号的连接
向R/D变换板反馈的俯仰状态信号有(见图5):
俯仰伺服准备好FYSFDY,接通电源后没有伺服报警的状态下,驱动器送回该信号。
俯仰伺服报警FYALM,俯仰伺服分系统有故障时产生报警信号。
俯仰定位完成或速度达到FYCOIN,在定位控制时,偏差计数器所在的脉冲量在设置范围之内时产生此信号;在天线转动时,天线转速达到指令要求的转速时产生此信号。
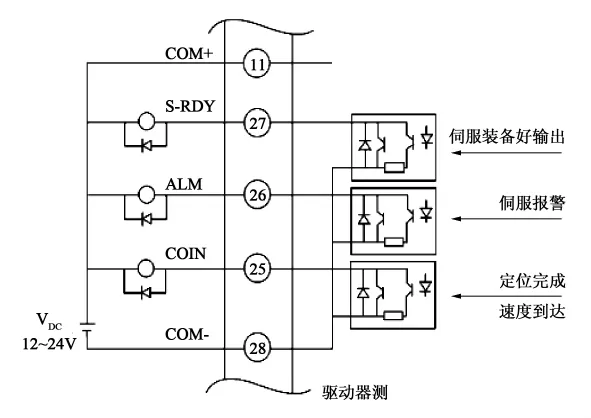
图5 俯仰驱动反馈信息连接示意图Fig.5 The pitching driving feedback signal connection diagram
2.3 故障检修
通过用三用表的欧姆档对俯仰驱动器、汇流环、编码器之间的通信电缆检查,技术人员发现与编码器相连的一根通信电缆SMA-J4插头的插针有回缩现象,影响接触电阻,产生俯仰驱动器和编码器之间的通信干扰,是造成此故障的原因,重新焊接该接头,故障排除。
3 结束语
在多普勒天气雷达伺服分系统的维修过程中,维修人员不可避免地要进入天线场地,因此,为保证人身安全,维修时必须严格遵守维护维修规范,做好各单位之间的信息通报。此外,北方冬季室内外温差较大,应做好雷达机房与天线场的隔潮隔热,并保持天线场地维持在合适的湿度,以防止因汇流环短路,而形成雷达伺服系统故障。
[1]安徽四创电子有限公司.ADWR雷达系统手册[K].安徽四创电子有限公司,2006.
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
测控技术(2018年5期)2018-12-09
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
电信科学(2016年10期)2016-11-23
光学精密工程(2016年5期)2016-11-07
电子器件(2015年5期)2015-12-29
科技传播(2015年20期)2015-03-25
上海电机学院学报(2015年3期)2015-02-28
西安航空学院学报(2014年5期)2014-07-13
