基于CarSim的车辆自适应巡航仿真与试验研究
2013-09-10 03:19李径亮夏汤忠陆志成刘昭度
汽车科技 2013年2期
李径亮,夏汤忠,陆志成,刘昭度
(1.神龙汽车有限公司技术中心,武汉 430056;2.北京理工大学机械与车辆学院,北京 100081)
车辆自适应巡航控制系统 (Adaptive Cruise Control system,下简称ACC)是一种被广泛研究且具有广阔前景的车辆主动安全装置。一般认为ACC是一种增强驾乘舒适性的电控装置,其原理是利用激光/毫米波雷达、摄像头等传感器对相同车道内前方目标进行检测,通过电控系统自主地对发动机及制动系统的联合控制实现安全车距保持功能[1,2]。ACC有助于缓解驾驶员的驾驶疲劳感,现已经越来越多被应用于国内外中高档轿车上。
在ACC系统开发过程中,涉及的关键技术主要包括:①车辆状态测量(轮速、质心加速度、横摆角速度等);②目标检测与跟踪(基于雷达或摄像头的目标检测与跟踪);③ACC核心控制算法的开发;④发动机、制动系统的通讯与控制等。利用CAE软件辅助开发与设计能显著提高ACC装置开发效率,尤其在ACC核心控制算法开发过程中,CAE软件辅助开发具有结果直观、开发周期短、成本低廉等显著优势。
CarSim是一种专业的车辆动力学仿真软件,能准确模拟车辆对驾驶员操作行为、空气动力学以及路面激励的响应。在车辆操纵稳定性、平顺性、燃料经济性、动力性等领域有广泛应用[3]。其优势体现在能方便的模拟各种复杂路面几何形式及峰值附着特性、模拟复杂的驾驶员操作行为和试验工况、通过简单的系统定义输出复杂的多刚体机械结构动力学模型等。其强大的可扩展性及丰富的接口使其能方便的与 Matlab/Simulink、dSpace、Labview 等软件进行联合仿真,用于各种高级功能开发,尤其在车辆电控系统的开发模拟方面具有显著优势。同时CarSim软件存在一定局限性,主要体现在:某些部件具有显著几何非线性特性及材料非线性特性,需要借FEM方法进行刚柔耦合计算才能获得较理想的计算值,CarSim在处理此类部件上显得手段较单一。
结合现有条件,拟采用CarSim与Simulink联合仿真的方式进行ACC控制器开发,并将成功开发的ACC控制器移植到试验样车,以完成原理样机的试验。其具体开发流程可以描述为:
(1)在CarSim和Simulink环境下进行基于试验的参数化建模,并完成试验对标;
(2)在CarSim与Simulink的集成环境下进行ACC控制器开发调试;
(3)将ACC控制器移植到样车嵌入式电控系统,并完成实车试验。
1 基于CarSim和Simulink的建模与试验对标
为了保持CarSim的模型特性与物理样车的一致性,在建模过程中需尽可能准确的模拟物理样车各部件的特性,试验样车主要参数见表1、表2。在CarSim中能便捷地按车辆结构参数建立模型,同时也能在模板中建立车辆发动机、变速箱、转向器等特性;对于CarSim没有专门定义的部件则需要在Simulink中定义,如节气门开度特性、制动轮缸电磁阀特性等[2]。
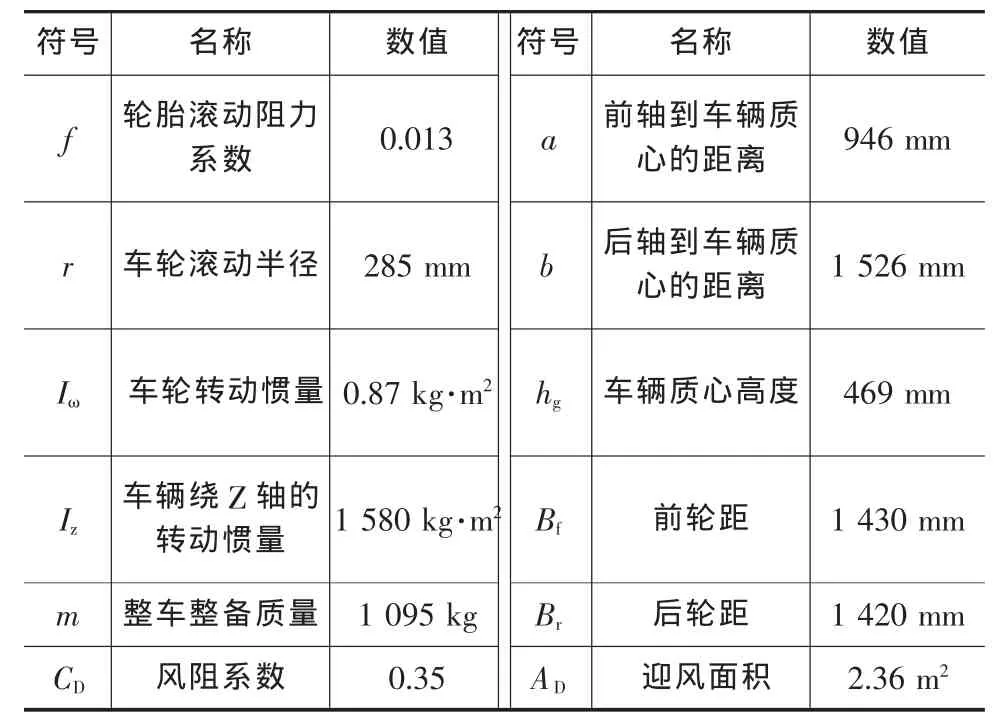
表1 试验样车主要参数
试验样车在CarSim中建立的发动机特性曲线及动力因数曲线见图1、图2。

表2 试验样车变速箱及主减速器传动比
将已经建立好的模型与试验进行对标。考虑到ACC工作主要涉及直线加速、滑行、减速等工况,分别利用上述工况的试验数据与相同工况下的仿真数据进行比对,结果见图3~图6。
图3~图6中仿真与实车试验的结果对比表明,在加速、制动以及滑行状态下,CarSim模型均能较精确的反映试验样车的性能,符合ACC控制器开发要求。
2 ACC控制策略及控制器开发
当主车道内存在目标车辆时,ACC车辆通过传感器检测前方主车道目标的车距与相对车速,并依据自身车速计算出安全车距[4]。ACC车辆通过控制发动机节气门开度与主动调节制动轮缸压力实现对车速的调节。本文选取的车辆安全车距为:
式中:ddes为安全车距,m;Vtar为目标车辆纵向速度,m/s;Tset为驾驶员设定的时间,s;d0为距离变量,m,一般依路面类型选取。
以ddes作为车距控制目标设计ACC控制器。实际车距与安全车距偏差如式(2)所示:
式中:ed为实际车距与安全车距偏差,m;dreal为实际车距,m;其它参数意义同上。
定义实际车距与安全车距偏差变化率为:
车辆ACC控制器结构见图7。
考虑到控制程序的可移植性,采取模糊控制策略作为 ACC控制手段[5](见图 8):以实际车距与安全车距的偏差ed以及偏差变化率作为输入,并确定车距偏差ed论域为[-30 m,30 m],车距偏差变化率论域为[-15 m/s,15 m/s]。以车辆期望加速度作为模糊输出,且期望加速度区间为论域为[-0.6 m/s2,0.6 m/s2]。
利用控制器得到的期望加速度数据,进行发动机节气门控制或制动系统主动压力调节控制,其方法可以简述为:当期望加速度高于某一阈值时,采取控制节气门开度的方式进行速度调控;当期望加速度处于某两阈值之间时,通过使发动机保持怠速开度进行控制;当期望加速度低于某一阈值时,保持发动机怠速开度,同时对制动系统进行主动压力调节,使制动器轮缸内产生一定压力,以实现减速控制[2~6]。
3 ACC控制仿真结果及初步实车试验结果
利用上一节开发的ACC控制器进行CarSim/Simulink联合仿真,仿真工况描述如下:ACC车辆以90 km/h的初始速度在良好附着平直路面行驶,雷达检测到主车道正前方60 m处存在车速约80 km/h的目标车辆。在CarSim中设置目标车辆为4×2后驱GT车,其发动机功率300 kW。由于初始车距大于安全车距,且ACC车辆速度略高于目标车辆速度,控制器调节发动机节气门首先使实际车距与安全车距接近,同时使ACC车辆车速与目标车辆车速一致。此后车辆进入稳定的ACC控制,保持相对车距在安全车距附近,同时保持ACC车辆车速与目标车速基本相同。图9与图10对比结果显示,ACC仿真控制器控制效果良好。
将ACC模糊控制器移植入自主研发的ACC电控系统并进行ACC实车试验,初步试验结果如图11与图12所示。试验中利用Delphi ESR毫米波雷达检测目标车辆与ACC主车的相对速度、相对距离及方位角,并依据自主开发的目标识别及跟踪算法对目标车辆实施跟踪[2]。ACC控制器根据实测计算得到的相对距离变化率及相对速度变化率利用从仿真控制器中移植得到的控制算法进行期望加速度计算,并利用电子节气门开度控制和制动轮缸主动建压及压力调节技术分别实现车辆的加速及减速控制。
实车试验结果表明:
(1)ACC车辆能准确检测并跟踪车道内目标;
(2)ACC车辆能依据目标车辆运动变化自主地实现车速调节并保持安全车距;
(3)现有算法并不完善,在目标车辆出现急加速或急减速时控制器存在一定程度的滞后与超调,需要进一步完善。
4 结论
本文利用CarSim/Simulink联合仿真的方法建立了某试验样车的车辆动力学仿真模型并通过试验对标验证了模型与样车的一致性;基于仿真模型在联合仿真环境下设计并开发了ACC控制器并进行了车辆自适应巡航仿真试验;将仿真控制器移植到自主研发的车辆ACC电控系统并进行实车试验并实现了基本功能。
[1]Xiao Lingyun,Gao Feng.A comprehensive review of the development of adaptive cruise control systems[J].Vehicle System Dynamics, 2010,48(10):1167-1192.
[2]李径亮.车辆 ABS/ASR/ACC 集成技术研究[D].北京:北京理工大学,2012.
[3]吴利军,刘昭度,何玮.汽车ACC跟随控制策略研究[J].汽车工程, 2005,27(5):514-515.
[4]Daniele Corona and Bart De Schutter.Adaptive Cruise Control for a SMART Car:A Comparison Benchmark for MPC-PWA Control Methods [J].IEEE Transactions on Control Systems Technology,2008,16(2).
[5]Li Jingliang,Liu Zhaodu.Design of ACC controller based on double level mamdani reasoning [J].Proceedings of the 2009 WRI Global Congress on Intelligent Systems,GCIS 2009,2009,2:233-237.
[6]马岳峰,刘昭度,吴利军,等.基于ABS的ABS/ASR集成液压系统设计[J].液压与气动,2004(6): 27-29.
[7]李径亮,刘昭度.基于MCU的车辆ACC电控系统设计[J].微计算机信息,2009,25(10-2):1-3.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年16期)2022-08-31
车主之友(2022年4期)2022-08-27
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年4期)2022-03-07
内燃机与配件(2021年11期)2021-09-10
内燃机与配件(2020年20期)2020-09-10
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
中国科技纵横(2017年13期)2017-08-09