基于北斗阵列的靶船遥控遥测系统
2013-09-19 10:18王爱民何四华
无线电工程 2013年1期
王爱民,何四华
(中国人民解放军92941部队,辽宁葫芦岛125000)
0 引言
在某种特定条件下,经常需要对海上无人职守的靶船进行遥测遥控。但随着作用距离的变大以及与海岸高山、岛屿的距离越来越远,依靠现有的超短波遥测遥控设备并利用海岸高山或2个海上目标之间的遥测遥控方式,无法满足超视距遥测遥控的使用要求。如采用中继站进行接力通信方式,也会因海上条件恶劣或远离岸以及中继平台的使用条件限制或费用过高而难以实现。为满足使用需求,在对几种通信方式优缺点分析的基础上,提出了一种基于北斗卫星导航定位系统(简称北斗系统)的靶船遥控遥测系统。
1 系统的设计与实现
1.1 总体设计思路
靶船作为无人值守平台,对遥测遥控设备的可靠性、实时性都有较高的要求,同时,作为被打击目标又要求使用方便、造价低廉,而靶船与控靶端距离的加大及靶船自身航向和姿态的不稳定性又对遥控遥测设备提出了更高要求。超短波体制的遥测遥控设备一直作为靶船遥测遥控的首选工作方式。但当进行超视距遥测遥控时,这种设备则需要依靠中继接力传输才能满足距离要求,而使用中继方式会受到中继平台的制约。目前海上试验常用的中继平台主要是有人飞机、无人飞机和飞艇等。由于试验频繁、留空时间长、升空准备时间长和程序复杂等原因,使得这几种空中平台的使用受到试验组织困难,航程、载荷和高度不够等方面的限制。使用短波通信方式虽可解决传输距离问题,但由于短波在远距离通信时主要依靠天波传播,而天空电离层高度和密度容易受昼夜、季节和气候等因素影响,所以短波通信的稳定性差,噪声较大。传输过程中路径衰耗、时间延迟、大气噪声、多路径效应和电离层衰落等因素都会造成信号的弱化和畸变,影响传输效果。卫星通信虽然通信距离和效果、实时性等方面都较好地满足使用要求,但其设备购置使用费用较高,同时,接收天线尺寸较大且需要固定方向,这既可能造成靶船雷达散射特性的变化,也会增加靶船上设备加装难度和成本。
综合分析几种通信方式的作用距离、实时性、带宽和使用成本,选用北斗系统作为靶船的超视距传输方式较为适宜。北斗系统具备一定区域内快速定位、简短通信和精密授时的功能[1],而且通信距离远、数据保密性好、抗干扰能力强[2],非常适合于在靶船遥控遥测系统中使用。同时其定位功能还可解决靶船的位置测量问题。
北斗系统的简短通信功能是远程数据传输的一种有效手段,靶船的遥控遥测主要利用其简短通信功能,通过短消息的方式实现数据传递,收发双方事先约定好通信协议,对照通信协议解析有用信息。但北斗系统的通信频度受到用户等级的限制,其中3类用户的通信频度约为1次/10 min,二类用户的通信频度约为1次/60 s,数据传输速率较低。尽管一类用户的通信频度可以达到1次/s,但是受到用户容量的限制,使用对象十分有限。为了克服这一缺陷,设计了一种基于北斗用户机阵列的靶船遥控遥测系统,利用多个低等级北斗用户机组成阵列,循环进行数据传递,可有效提高通信频度和数据传输速率。
北斗系统的简短通信功能允许用户与用户、用户与地面控制中心之间进行双向数据传输。一般用户一次可传输36个汉字,经核准的用户可利用连续传送方式,最多可传送120个汉字。每个用户终端都有专用识别码,用户终端随机响应某一时刻经过卫星转发的询问信号,响应信号和询问信号的帧结构中都有通信信息段[3]。
1.2 靶船遥控遥测系统设计
系统由靶船设备单元和远程监控单元2个部分组成,靶船单元布设在靶船上,远程监控单元布设在地面。
系统的工作过程是:当靶船设备单元需要与远程监控单元相互通信时,其中一方通过用户终端将对方地址码和通信电文随响应信号经过卫星发送到地面控制中心;地面控制中心收到该响应信号,译出目的终端地址和通信电文,将通信电文加载到目的用户终端能够识别的通信码信息中,随询问信号一同发射出去。这样,对应的用户终端便可得到通信信息,而非对应地址码的终端解不出通信段内容[4]。整个过程只需1 s左右即可完成。
1.2.1 靶船设备单元
靶船设备单元由1个数据采集编码器和1个北斗用户机阵列(N个北斗用户机)组成,结构如图1所示。

图1 靶船设备单元结构
工作流程如下:
①数据采集。通过数据采集编码器的传感器,采集包括靶船位置、航向、姿态和设备工作状态等参数。
②数据编码。通过数据采集编码器将采集到的遥测数据按照通信协议和数据格式来进行组织,按照北斗用户机的通用接口协议进行编码[5,6]。
③程序控制信息发送。按照程序设定的时间顺序将数据通过由N个北斗用户机与天线组成的阵列发送给地面监控中心。北斗用户机阵列的时序控制是设计的关键,以二类用户为例,它的通信频度约为1次/60 s,如果由N个北斗用户机组成阵列,最理想的情况是每个北斗用户机在60 s的通信周期内都能够发送1次通信报文,而且相互之间的时间间隔应该相等。通过这种方式,既可以充分发挥每个北斗用户机的效能,又能保证通信时序的均匀性,这里按照图2所示的程序进行时序控制。北斗用户机阵列通信时序控制流程如图2所示。
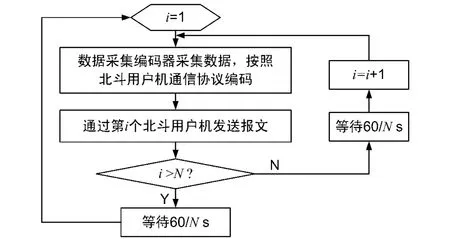
图2 北斗用户机阵列通信时序控制流程
④遥控指令处理。遥控指令的接收通过中断程序完成,根据接收数据判断报文的正确性,抛弃不正确的数据报文。接收到正确的数据报文后,置位需要数据处理标志。数据处理的任务就是解读收到的数据报文,提取命令和参数,完成相应操作,然后组织返回的数据报文,并发送到远程监控单元。
1.2.2 远程监控单元
远程监控单元由1个北斗指挥机和1个显控终端组成,北斗指挥机与靶船设备单元的N台北斗用户机组成指挥网络,用于监听下属用户发送的遥测信息,并向下属用户发播指令。显控终端实时显示遥测信息和遥控指令发送情况。
除具有普通型用户机所有功能外,北斗指挥机还能够播发通信信息和接收中心控制系统发给所属用户的定位通信信息,从而鉴别、指挥下属其他北斗用户机。同时,还可与下属北斗用户机及中心站进行通信,接收下属用户的报文,并向下属用户发播指令。当用户定位或者通信的时候,指挥机能够同时监听到这些信息,在广域位置报告和指挥控制系统管理软件上可以及时监控每一个下属单元的位置及通信内容。与电子地图相结合后,可在电子地图上显示出态势形势,必要时可将态势图传给相关用户,增强单元间的协同能力。
远程监控单元的工作流程为:
①遥测信息接收。监听下属北斗用户机的定位或者通信信息。
②遥控信息发送。根据用户需求,按照北斗用户机的通用接口协议,对下属用户发送遥控指令。
③综合监控。解析数据,通过软件界面提供给用户。
2 组装调试与性能分析
根据总体设计和设备选型进行原理设计,完成了数据采集编码器的制作,并按各部分功能进行了调试与室内检测,达到了预期效果。随后进行了海上实际使用条件下通信有效作用距离、可靠性和实时性以及环境条件适应能力考核试验。试验时,将远程监控单元和靶船设备单元分别按实际使用方式放置在陆地和靶船上,二者的距离远大于视距并有明显的遮挡物。经整机测试、联试表明系统工作稳定可靠,控制指令发送、接收正常、数据的信息量和实时性均满足试验使用要求。
系统在靶船的实际使用可以看出,相比较于传统的遥控遥测系统而言,具有构成简单、易于组网、无需通视、抗干扰能力强、码间干扰小、价格低廉、可靠性高和应用灵活等优点,可推广应用到其他需要超视距遥控遥测的领域。
3 结束语
北斗系统具有简短通信功能,信号覆盖范围大,不受通信系统特性的制约,在远程监控系统中使用十分广泛。提出的基于北斗用户机阵列的遥控遥测使用方法,是对北斗系统使用的新尝试,有效解决了低等级北斗用户通信频度低的问题,可成倍提高通信系统的工作效率,在远程遥控遥测设备研制中具有广泛的应用前景。
[1]刘传润.北斗卫星导航定位系统的功能原理与前景展望[J].中国水运,2008(1):165-166.
[2]唐金元,于 潞,王思臣.北斗卫星导航定位系统应用现状分析[J].全球定位系统,2007(1):26-30.
[3]吴允平,蔡声镇,刘华松,等.航标遥测遥控信息系统的设计与实现[J].计算机工程,2006(12):253-254.
[4]朱伟康,张建飞,傅俊璐.北斗卫星系统在远洋船舶上应用的研究[J].无线电工程,2008(9):35-37.
[5]沈 鹏,徐景硕,张建忠.北斗导航系统及其在无人机上的应用[J].航空电子技术,2007(2):5-8.
[6]胡 伟.单片机程序设计及应用实例[M].北京:人民邮电出版社,2003:34-38.
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
小学生优秀作文(低年级)(2021年11期)2021-12-06
当代陕西(2019年18期)2019-10-17
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
语文世界(小学版)(2019年2期)2019-02-24
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
现代工业经济和信息化(2016年6期)2016-05-17