旋转编码器抗抖动信号处理电路及其角度测量应用
2013-09-22 07:18邹华东谢发忠陈小林
大庆师范学院学报 2013年3期
邹华东,谢发忠,陈小林
(安徽国防科技职业学院,安徽 六安 237011)
0 引言
角度的精确控制和测量在工业生产当中具有较为广泛的需求,最早的多尺分度盘为代表的机械式角度计量方法通常只是适用于低速和较为粗糙的场合,主要由人工完成,但是随着生产的精密化、高速化和电子信息科学技术的飞速发展,这些工作已经由角度传感器件、相关信号处理电路再配合相应的主控器来完成[1]。
机械式测角技术和电磁式测角技术是测角技术中研究最早的测角技术,随着光学和电子技术的发展,光学测角技术以极高的测量精度受到重视,应用越来越广泛。旋转光电编码器是一种将角位移转换成脉冲信号的传感器,它具有体积小,精度高,抗干扰能力强,信号数字化等优点,作为光学测角法的一种常用传感器件,在数控机床测速和定位、机器人位置检测等方面有着广泛的应用[2-4]。
2011年全国大学生电子设计竞赛的帆板控制系统,帆板的角度需要通过风机进行控制,为了准确确定位帆板角度,需要对帆板实际角度进行测量并反馈给控制系统,同时由于帆板实际位置总是处于一种动态的平衡位置,采用旋转光电编码器进行测量时,需要不受编码器输出信号中高频尖脉冲的影响,进行信号抗抖动处理,准确测得实际角度以进行闭环控制。本文的抗抖动处理电路正是出于这一应用目的而开发。
1 角度测量与控制系统
图1为帆板控制系统。由键盘按键输入帆板预定达到的角度,通过对风扇电机的速度控制来调整风力,系统对帆板的倾斜转角实时测量并显示,一旦帆板位置到达设定倾角的误差范围内(5°),风扇电机的速度就维持不变。
系统角度测量要求的分辨力为2°,帆板的摆动范围为0°~60°,所以采用200线的欧姆龙旋转编码器E6A2-CW5C增量式编码器,在没有细分的情况下编码器的分辨力为1.8°;该编码器为NPN 型集电极开路输出的编码器,需在信号输出端接一上拉电阻到电源正极。
在进行单方向运动的测量时,旋转编码器的输出信号为相差90°的两路正交的输出信号,为了防止后端信号的干扰,采用光耦进行电路隔离,可以通光耦后端信号经过由D触发器和两路与非门构成的辨向电路处理后,分两路分别输出正向脉冲P+和反向脉冲P-,该脉冲分别通过单片机ATM89C51的T0、T1两个计数端口进行计数,帆板实际角位移为(T0-T1)1.8°,获得的角度信息由单片机控制LCD1602进行实时显示。
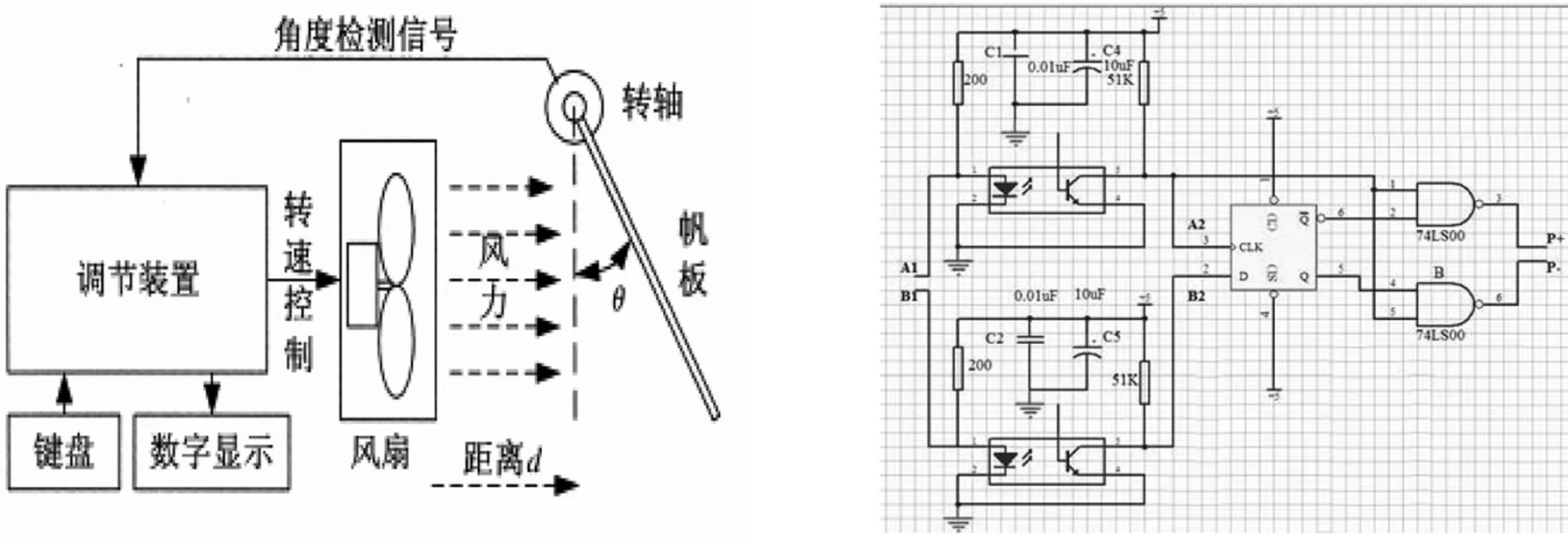
图1 帆板控制系统 图2 编码器信号处理电路
风扇的控制电机为直流电机,其风速控制通过脉宽调制来实现,当测量的角位移与实际设定值的差值超过允许误差范围时,由主控单片机1通过P2.0 、P2.1端口通知直流电机控制专用单片机2,如果小于设置值,逐级增加直流电机控制信号的占空比,如果大于设置值,逐级减少,直到到达预定位置, 到达指定位置时,通过握手信号线P2.2通知直流电机保持当前控制风机的占空比,同时由单片机2控制发光和发声模块进行相应操作,电机的驱动采用LM297模块。
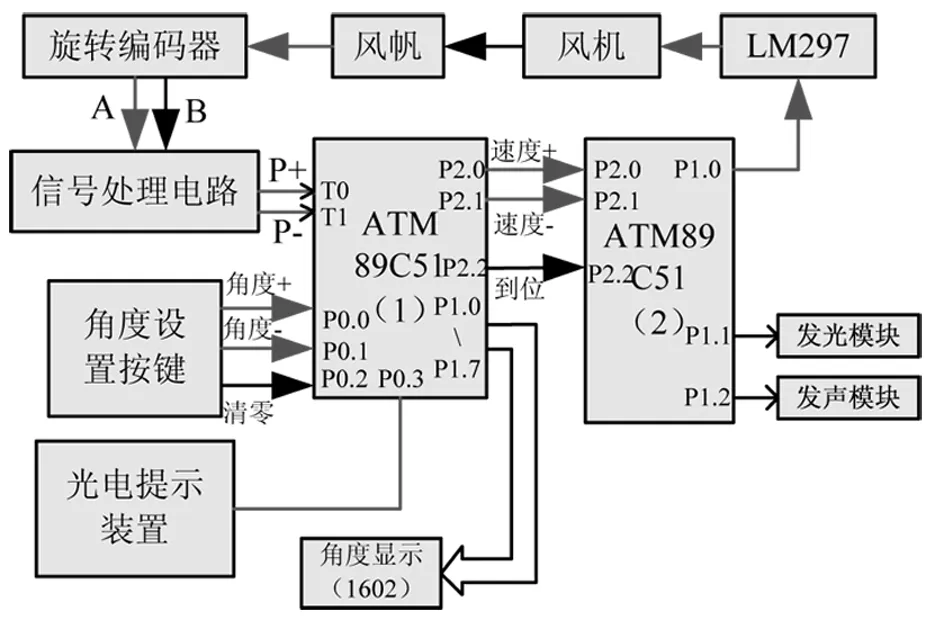
图3 角度测量控制系统基本原理
2 风帆动态平衡时抖动产生高频干扰影响
图4为光电编码器的工作原理图。码盘上分布着沿着圆周等分的细小狭缝,码盘后端放置发光元件,前端分布着三个光敏元件,当旋转元件带动编码器的旋转轴运动,当狭缝和光电接受元件正对时,光线由狭缝穿过,由光敏元件接受,在圆周上布置好光敏元件后,能够获得相差90°的两路信号A、B和计周信号Z。
风帆在风机的风力和自身重力的分量达到平衡时,能够较为稳定的停留在相应的位置,但这时不是一种固定的平衡,其位置在一定的范围内发生变化,即我们所谓的抖动。根据示意图可知,如果狭缝和光敏元件正好在临界接收位置时,此时的抖动能够造成在某一方向的持续的小宽度的脉冲电平信号,从而造成误计数。在电子竞赛中的帆板控制系统中,采用图2所示的信号处理电路配合单片机计数时,在人工转动帆板并观察液晶数显时,读数较为准确,基本在误差范围内。而当风帆在进行自动风力调节到指定角度时,往往无法到达指定位置,根据液晶数显指示,此时读数已经完全紊乱。
动态测量过程中抖动所产生的影响对于整个系统的闭环控制,影响非常大,图5为通过示波器所观察的高频尖脉冲示意,上部的方波为正常无抖动情况下的编码器输出波形,而下面的波形为在平衡位置时产生的宽度很窄的尖脉冲。通过图2所示的辨向电路时,尖脉冲也能在正向或者反向产生脉冲,影响后端电路的正常计数。
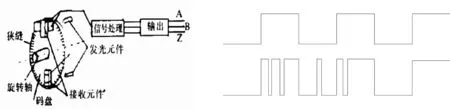
图4 光电编码器工作原理图 图5 动态测量时高频尖脉冲波形图
3 改进后的抗抖动信号处理电路
抖动产生的尖脉冲需要相关的电路或者通过软件数字滤波对信号进行处理。目前比较常用的有数字解码技术,通过与正常的电平持续时间的比较来去除其中的短时尖脉冲,但是增加了软件开发的复杂程度很消耗单片机的时间开销;另外一种方式是通过RC滤波电路对高频的尖脉冲进行滤除,但编码器的旋转速度通常是变化,选择相应的滤波频率比较困难[5-6]。在比较并实验了相关的方法后,采用GAL16V8开发了相关硬件抗抖动处理电路。
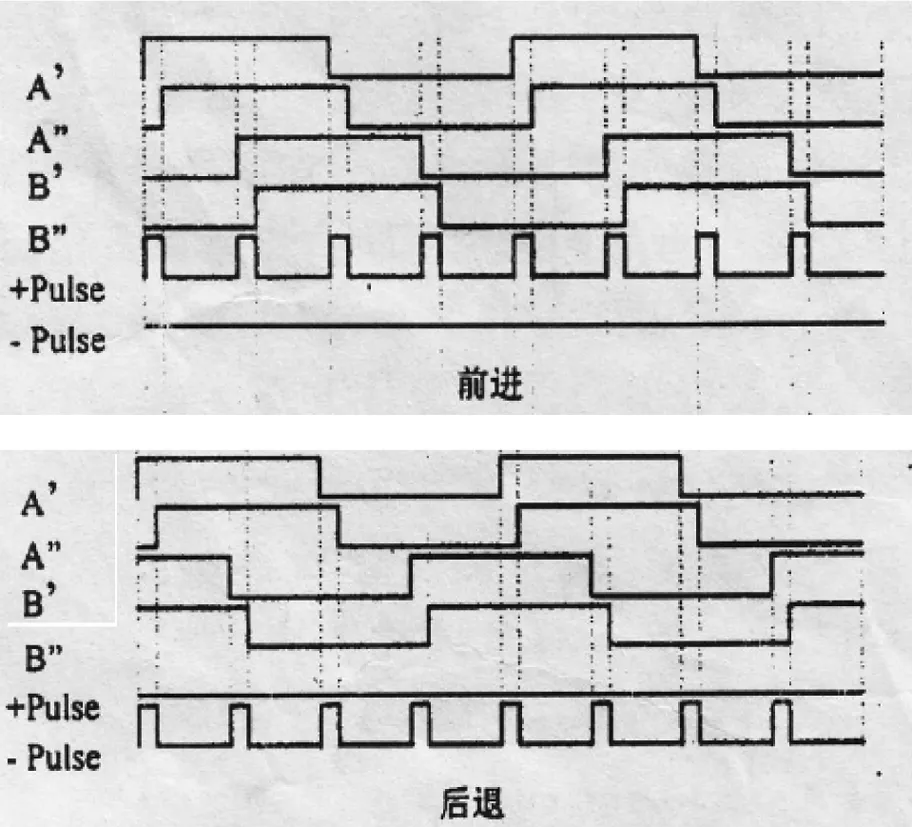
图6 编码器信号倍频辨向波形图
编码器的原始输入信号A、B经过D触发器整形,经过一级触发器后变为A′、B′,经过二级触发器比较后变为A″、B″,D触发器能够对信号进行整形,尖脉冲经过D触发器两级整形后,其影响基本消除,由于在后续的倍频电路中不再采用原始信号计数,所以高频尖脉冲的影响被消除,提高了系统的抗干扰性能。
在倍频辨向电路中,采用组合时序逻辑电路实现对 A′、B′、A″、B″四个信号进行逻辑组合,逻辑表达式如下:

(1)

(2)
为了简化电路模块,采用GAL16V8作为编码器信号处理部件,如图7所示,其中AB信号从图2所示电路的A2、B2端接入,用GAL器件烧入抗抖动处理电路来取代前面的辨向电路,其中CLK时钟信号最低为8*N*S,N为编码器每周输出脉冲数,S为每秒码盘的最高转速,在实际应用电路中采用单片机的晶振频率6分频后接入,常采用2MHZ时钟信号[7-8]。
4 抗抖动处理电路在风帆系统中的角度测量应用
图8为帆板控制系统实物图。单片机通过T0和T1端口接入经过光耦隔离和抗抖动处理电路处理后的信号P+和P-,经过当量计算后与预置角度进行比较,如果偏差不在许可范围,通知主控器2进行调节风速,一旦到达后通知主控器2保持风速。整个过程循环执行。
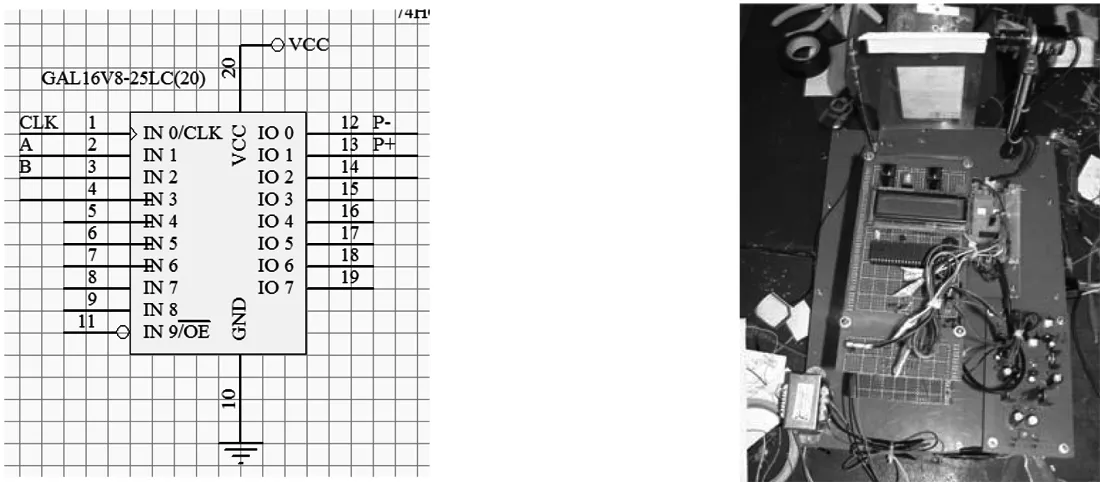
图7 GAL16V8连接图 图8 帆板控制系统实物图

次数设定角度值数码管显示值量角器测量值15°4.95°5°215°14.85°15.4°330°30.15°31°435°35.10°35.8°545°45°46°650°49.95°49°760°59.8561°
系统按照竞赛要求,进行角度控制实验,分别取7个角度进行验证,实验结果如表1所示。该闭环系统设置的角度和数码管显示角度、量角器测量角度基本保持了一致,实际测量过程中量角器的量测的精度低于编码器的0.45°的分辨率,并且受观测角度和摆动时候的观测误差影响。
表一显示的测量结果表明,采用抗抖动处理的倍频电路的角度测量系统能够精确的测定实际风帆的摆动角度,整个控制系统稳定可靠;而在没有采用该电路之前,整个控制系统只能采用开环控制,其角度显示部分在自动控制角度时,无法做到正确的显示帆板位置,该电路的开发对于我校电子大赛取得优异成绩发挥了很大的作用。
5 结语
传感器在实际应用过程中,受外部环境或者应用场合环境的影响,感应信号夹带杂讯和其他的一些相关干扰是常见问题,这些问题的解决往往决定了整个系统的综合性能的好坏。本文所开发的光电编码器抗抖动信号处理电路,能够克服光电编码器在似动未动位置产生的高频尖脉动对计数的影响,同时还实现了信号的四倍频,提高了系统的分辨率。
该测量电路的开发与传统的抗抖动滤波电路,软件解码数字滤波相比,可靠稳定,减少了编程的复杂程度,对于其他的光栅、感应同步器等输出相差90度的两路方波的位置检测装置的信号处理具有参考意义,在现代电子技术发展不断进步的今天,包括单片机在内的该角度检测系统所有电路都可以集成到FPGA芯片中,作为一个专门的固件使用,应用前景非常广阔。
[参考文献]
[1] 陶卫,浦昭邦,孙运斌.角度测量技术的发展[J].激光杂志,2002,23(2):5-7.
[2] 余金栋.基于步进电机的角度测量及其在帆板控制系统中的应用[J].机电工程技术,2012,41(7):129-167.
[3] 朱海洋,欧阳明星.基于CPLD的旋转编码器接口电路设计及应用[J].机电工程技术,2009,38(05):86-88.
[4] 刘杨,吕恒毅,谭立国,等.光电编码器信号处理技术的研究进展[J].自动化仪表,2011,32(3):16-20.
[5] 陈敏捷,田国璋.编码器的抗抖动计数电路[J].电子技术应用,2011(11):70-75.
[6] 代杰,樊瑜瑾,张学丽,等.基于单片机的光电编码器位置检测系统设计[J].计算机测量与控制,2009,19(1):17-19.
[7] 沈卓,宋又廉.基于通用逻辑阵列芯片GAL的光电编码器倍频技术[J].传感器世界,2005(1)::37-39.
[8] 陆鸣.梅文.GAL的工作模式及实际应用[J].核电子学与探测技术,1992,12(4):225-229.
猜你喜欢
新教育时代电子杂志(教师版)(2022年31期)2022-02-09
成都信息工程大学学报(2018年3期)2018-08-29
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
西安工程大学学报(2016年6期)2017-01-15
电子器件(2015年5期)2015-12-29
空间控制技术与应用(2015年4期)2015-06-05
电测与仪表(2014年13期)2014-04-04