
基于眼睛定位及AdaBoost算法的平面旋转人脸检测①
2013-09-27 14:26徐镇辉谢淑丽
佳木斯大学学报(自然科学版) 2013年5期
徐镇辉, 谢淑丽
(漳州职业技术学院计算机工程系,福建 漳州 363000)
0 引言
复杂背景条件下的人脸检测是一项很有挑战性的工作,目前人脸检测多针对正面端正的人脸,由于多姿态人脸特征的多样性,需要考虑和解决的问题很多,多姿态人脸检测还存在很大困难.基于AdaBoost的方法能有效解决复杂的人脸检测问题,检测精度高,但时间代价大[1].肤色分割能较快确定人脸区域,但误检率高.眼睛定位可进一步确定候选人脸区域、估计人脸姿态,常用于多姿态人脸检测.因此,本文利用人脸多种特征信息,综合肤色分割、眼睛定位和AdaBoost算法等多种方法,取长补短,实现一种针对复杂背景下平面内旋转人脸的多姿态人脸检测方法.
1 确定候选人脸区域
(1)由于肤色特征相对稳定,不易受姿态、表情变化的影响,且有别于多数背景颜色.在Anil K·Jain肤色模型基础上,采用亮度分段的肤色分割方法,建立 YCbCr彩色空间的肤色模型[2,3].亮度在[80,220]范围的像素点直接用肤色椭圆聚类方法判断,亮度大于220的像素点用扩大1.1倍长短轴的肤色椭圆聚类方法判断,排除大部分背景区域.
(2)为了增强肤色区域特征、抑制噪声,用数学形态学滤波器除噪,然后根据人脸的大小、长宽比、填充率等几何特征,确定候选人脸区域.由于平面旋转人脸的长度、宽度可能增大,因此设定人脸的长宽比为[0.6,2],候选人脸区域的像素与其外接矩形的像素比 S/S'为[0.4,0.9].
2 平面旋转人脸的眼睛定位
2.1 眉眼区域分割
特定变化点位置及对应脸部特征,确定眉眼区域的上下边界[4].参照人脸“三庭五眼”的特征分布,水平灰度投影曲线第二个凸峰的宽度对应于平面内旋转人脸的双眼间距1/5(x2-x1)或正面人脸眉眼到鼻翼下缘距离1/3(y2-y1),当第二凸峰最大和最小梯度值点间的距离小于1/5(x2-x1)及1/3(y2-y1)时,可将第一、三凸峰的极值点对应位置作为平面旋转人脸眉眼区域的上下边界,否则取第一、二凸峰的极值点对应位置作为正面人脸眉眼区域的上下边界[5].根据图1定位出的候选人脸区域,形成的水平灰度投影曲线如图2所示,分割得到的眉眼区域如图3所示.
2.2 眼睛定位及旋转角度判断
根据眼睛、眉毛等几何特征,计算眉眼区域中各孤立块的中心点坐标,其中,1),以及各孤立块垂直方向上的位置关系,然后设定眼睛大小、同侧眉眼的中心距、双眼中心距离等取值范围,并针对二值图像中可能出现有眉、无眉、单眼等情况分类判断[5].例如,设定眼睛大小20~100像素、双眼中心距离20~80像素,当人脸侧面旋转导致二值图像中某一只眼睛与背景相连时,可取眉眼区域内中心点纵坐标最小的孤立块作为单眼的中心点等.双眼定位后,根据双眼中心点连线的斜率,判断平面内人脸旋转角度.眉眼区域中的眼睛定位结果如图3所示,(b)(c)人脸旋转角度分别为26.6°,- 36.4°(逆时针旋转),(d)其中一只眼睛被头发遮挡.

图1 候选人脸区域
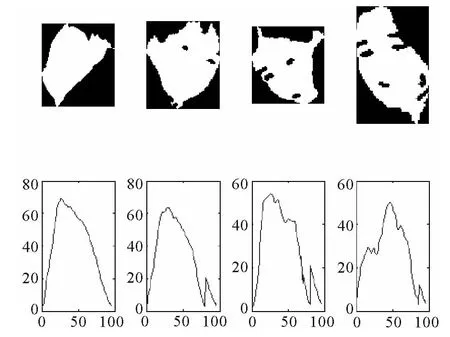
图2 候选人脸区域及水平灰度投影曲线
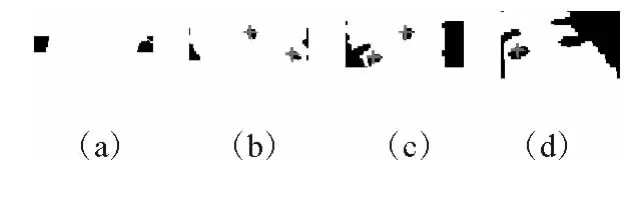
图3 眉眼区域中的眼睛定位
实验证明,人脸平面旋转角度越大,眼睛定位难度越大.当人脸旋转角度范围在45°~60°时,受到鼻子、嘴巴等其他脸部特征影响,大约有30%的眼睛难于准确定位.当人脸旋转角度超过60°时,眼睛定位效果较不明显.对无法定位眼睛的候选人脸旋转60°后,再进行眼睛定位和角度判断.
由于人体其他部位、类肤色背景等影响,候选人脸及眼睛定位结果中还存在部分误检人脸.因此,在眼睛定位基础上,构建AdaBoost级联分类器,对候选人脸区域进一步检测验证.
3 基于AdaBoost分类器的人脸检测验证
3.1 AdaBoost算法与级联分类器构建
Freund Y等提出了AdaBoost算法,利用大量分类能力一般的弱分类器,通过一定方法叠加(boost)起来,构成一个分类能力很强的强分类器[6].AdaBoost算法分类器的生成和人脸检测流程如图4所示.
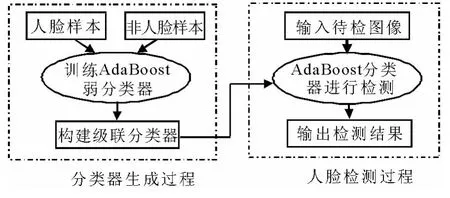
图4 AdaBoost算法分类器的生成和人脸检测流程
由于级联分类器是由若干个强分类器串联而成,所以它的检测率和误检率将由各级强分类器共同决定.采用从简单到复杂、逐级强化的分类器设计原则,即随着分类器级数增长,组成强分类器的弱分类器个数将不断增加,检测要求也越来越严格,误检率会不断下降,但漏检率也会随之上升.对每个级联分类器的训练目标是检测率达到90%以上,每个级联分类器由10个强分类器构成,则各强分类器的检测率要求达到99%,且误检率不超过50%.
根据不同的旋转角度范围,训练不同的级联分类器,多个级联分类器组成了人脸检测验证系统[7,8].由于 AdaBoost分类器的检测是在眼睛定位和人脸旋转角度判断基础上进行,在[-90°,90°]范围内按照[-90°,-60°]、[-60°,-45°]、[-45°,- 15°]、[- 15°,15°]、[15°,45°]、[45°,60°]、[60°,90°]等角度范围构建7 个级联分类器,对应于逆时针旋转、正面、顺时针旋转人脸图像的检测,并着重训练[-15°,15°]的正面人脸分类器及[15°,45°]、[45°,60°]、[60°,90°]顺时针旋转人脸分类器,另外三个逆时针旋转人脸分类器可由顺时针旋转人脸分类器镜像生成.
用MIT CBCL和部分ORL的人脸数据库作为训练样本集,并选用典型的角度作为代表,如在训练[15°,45°]角度范围的分类器时,人脸样本主要是取 15°,30°,45°左右的旋转角度,每个角度范围分类器分别使用2000~4000个人脸训练样本,并用图像处理软件进行角度变换及归一化处理,而大约8000个非人脸训练样本在不同分类器训练中交叉重复使用.
3.2 平面旋转人脸检测流程
根据不同的旋转角度,将眼睛定位后的候选人脸图像用相应角度范围的AdaBoost分类器进行验证,对无法判定旋转角度的人脸图像,如误检的人脸图像、眼睛定位的单眼情况等,用[-15°,15°]范围的正面人脸分类器检测验证.综合基于肤色分割、几何特征的人脸定位,以及基于灰度、梯度和几何特征的眼睛定位过程,设计平面旋转人脸检测流程如图5所示,人脸检测结果就是那些通过不同分类器的子窗口总和.
4 实验结果及分析
实验测试图像包括不同旋转角度的MIT人脸库中图像、生活中数码照片及互联网上随机收集的图像,共有117幅图像,包括173个人脸,其中平面内旋转人脸93个,这些人脸是出现在不同背景、不同光照条件下.将肤色分割、眼睛定位的人脸检测初步结果,与再用AdaBoost级联分类器验证的最终检测结果进行比较,检测结果见表1,实验中把只能定位出一只眼睛的候选人脸也作为初步检测结果的一部分.经过AdaBoost级联分类器进一步检测验证,虽然检测率受到一定影响,但是误检率明显下降.

图5 基于眼睛定位及AdaBoost算法的平面旋转人脸检测流程

表1 AdaBoost级联分类器检测验证的前后结果比较
从最终检测结果可以看出,[-90°,90°]范围的大部分旋转人脸能被正确检测到,但还存在部分漏检和误检情况.漏检主要是人脸被严重遮挡、人脸图像太小、佩戴眼镜等情况影响人脸特征的提取及眼睛定位,无法准确定位眼睛或者只能定位出一只眼睛,由于这类候选人脸用[-15°,15°]角度范围的AdaBoost分类器进行验证,针对性不强;另外,人脸训练样本角度不全也导致有些旋转人脸无法通过分类器验证,从而影响检测率.误检的主要原因包括类肤色复杂背景中存在与人脸极为相似的模式,训练平面旋转人脸分类器的矩形特征针对性不很强等.实验中也发现一边眉毛被误判为眼睛的情况,基本不影响检测结果.
5 小结
本文针对复杂背景下平面内旋转人脸的检测问题,提出了综合利用肤色分割、眼睛定位和Ada-Boost算法分类器的多姿态人脸检测方法.在眼睛定位和角度分析的基础上,根据人脸不同的旋转角度范围,用逐渐复杂的级联分类器结构,构建不同角度范围的AdaBoost级联分类器,有利于缩小分类器的作用范围,提高检测速度和精度.实验结果表明,该方法在保证检测率同时,能有效地降低误检率,对复杂背景下的彩色正面人脸和平面内旋转人脸有比较好的检测效果.下一步,将进一步挖掘人脸的特征,改进眼睛定位方法,并对训练分类器的矩形特征进行改进和扩展,以提高旋转人脸的检测角度范围和检测率.
[1]张建明,汪大庆.基于Adaboost算法的多姿态人脸实时视频检测[J].计算工程与设计,2010,31(18):4065 -4067.
[2]徐艳,陈孝威.人脸检测中的眼睛定位算法研究[J].计算机与信息技术,2006,(6):24-28.
[3]Rein - Lien Hsu and Anil K.Jain.Face Detection in Color Image[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2002,24(5).
[4]戴景文,刘丹,苏剑波.基于投影峰的眼睛快速定位方法[J].模式识别与人工智能,2009.22(4):605-609.
[5]谢淑丽,徐镇辉,陈锻生.基于多特征融合的平面旋转人脸的眼睛定位[J].漳州师范学院学报(自然科学版),2011,73(3):21-24.
[6]Freund Y.,Schapire R.E.Experiments with a New Boosting Algorithm[C].In:Proceedings of the 13th International Conference on Machine Learning,San Francisco,CA,1996:148 -156.
[7]Viola P,Jones M.Fast Multi-view Face Detection[C].In:Proceedings of the IEEE Conference on Computer and Pattern Recognition,2003.
[8]陈远,陈锻生.一种融合LBP纹理特征的多姿态人脸跟踪方法[J].华侨大学学报(自然科学版),2010,31(3):282 -287.
猜你喜欢
核安全(2022年3期)2022-06-29
少儿美术·书法版(2021年9期)2021-10-20
小学生必读(低年级版)(2021年5期)2021-08-14
文学港(2021年12期)2021-02-28
疯狂英语·新悦读(2020年4期)2020-06-18
好孩子画报(2020年3期)2020-05-14
小天使·四年级语数英综合(2019年9期)2019-11-09
—— “T”级联
同位素(2019年1期)2019-03-14
动漫星空(2018年9期)2018-10-26
原子能科学技术(2015年12期)2015-07-07
