
剧烈冲击不平衡力矩作用下平衡机动态特性分析
2013-10-14 11:01张垒阁戴劲松王茂森
机械制造与自动化 2013年5期
张垒阁,戴劲松,王茂森
(南京理工大学机械工程学院,江苏南京 210094)
某新型自动机通过绕其回转中心轴转动,来满足不同工作俯仰角度的要求。新型自动机绕其回转中心进行俯仰运动,由于其质量较大、质心前置,对回转中心轴的重力矩也较大[1]。在工作状态下,新型自动机受到剧烈冲击载荷的作用,对回转中心产生较大的动态力矩。本研究对新型自动机在工作状态下,受到剧烈冲击载荷作用而产生的动态力矩进行分析,分析研究结果为平衡机的设计与优化提供重要参考。
1 平衡机静态分析
1.1 平衡机的工作原理
新型自动机绕回转中心轴进行俯仰运动,为达到俯仰运动轻便与较高的运动精度,由平衡机来平衡其重力矩,其工作原理示意图如图1。

图1 工作原理示意图
为方便分析计算,建立如下相应的坐标系[2]:建立静坐标系OWU,OW为水平轴,OU为铅垂轴。建立绕O点旋转的动坐标系XOY,OX为自动机推进轨道的中心轴线方向,OY垂直于OX向上。在分析和计算过程中各种参考量符号说明如下:O为回转中心,Aj为平衡机与俯仰摇架连接铰链轴,B为钢丝绳与滑轮的切点,r1为Aj至O的距离,r2为B至O的距离,φj为俯仰角,γ0为俯仰角为零时自动机质心和回转中心O的连线与水平线的夹角,γj为俯仰角在φj时自动机质心与回转中心O的连线与水平线的夹角。
1.2 自动机质心的计算
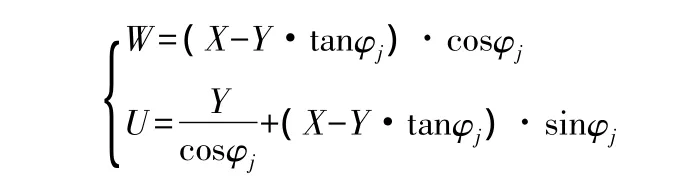
自动机的质量M及质心与其结构形式有着密切的关系。为使计算简化,对其各个部件建立数学模型,将各部件视为若干个质点,这些质点以回转中心O为原点[3]。则自动机质心在WOQ坐标系下的坐标为:
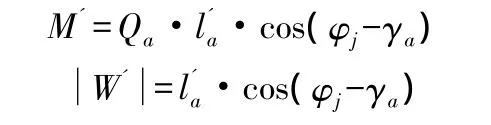
1.3 静态下俯仰角为φj时重力矩Mj

式中,Q为自动机的质量,l为质心与回转中心O的距离。
式中,Wz=l·cos(φj-γ0)
1.4 平衡机的平衡力矩Mp
自动机转过φj角时的平衡力矩为:
式中,n为平衡机的个数,K为一个平衡机的弹簧力,hj为俯仰角为φj时的平衡力臂。
1.5 俯仰角为φj时的不平衡力矩ΔM
经计算得到重力矩及平衡力矩其变化规律曲线如图2所示。由图可知,俯仰角在-7°~20°的范围内,平衡力矩大于重力矩,最大不平衡力矩为27.77N·m;俯仰角在20°~60°的角度范围内,平衡力矩基本上与重力矩相平衡;俯仰角在60°~90°的角度范围内,平衡力矩小于重力矩,最大不平衡力矩为-27.74N·m,满足要求。

图2 重力矩、平衡力矩曲线
2 系统动态力矩分析与计算
自动机系统的动态分析与计算是指在工作状态下,俯仰角为φj时,推进轨道内装载待推进物,将待推进物以一定的速度传送到指定位置。推进轨道是由多个推进单元组合而成。在推进过程中存在推进力,而由于推进的方式不同(即选择不同的推进单元),将造成推进力的大小及作用点的位置发生改变,此推进力即为剧烈冲击载荷;同时装载不同待推进物的数目也将影响自动机的质心位置。因此,对回转中心的重力矩也将发生变化。
自动机的重力矩包括两部分:1)只与俯仰角φ变化有关,而与自动机的工作状态无关,设其质量为Qb,在WOU坐标下的质心坐标为(Wb,Ub);2)既与俯仰角φ变化有关,又与自动机的工作状态相关,设其质量为Qa。同时,其他力对回转中心也将产生力矩的作用。下面对工作过程中的力及力矩进行分析,其受力示意图如图3所示。
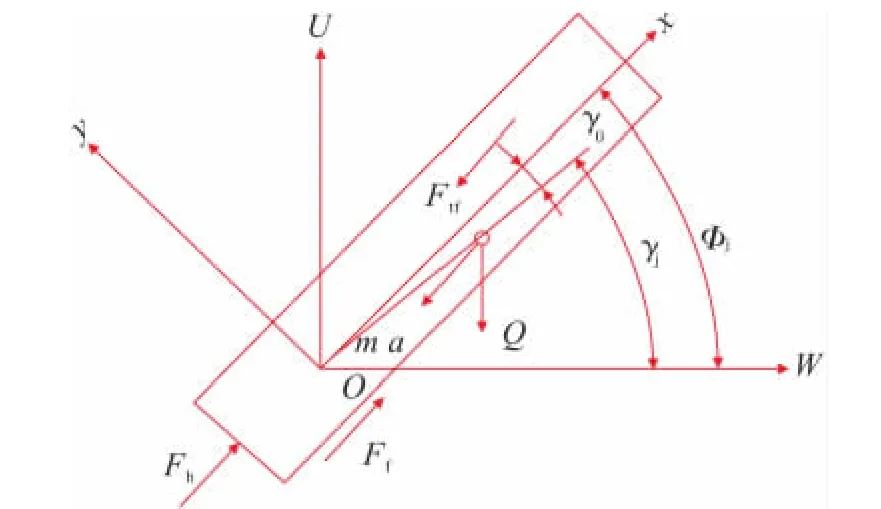
图3 受力分析示意图
在推进待推进物体时,推进力作用在推进物体上,而推进反力将作用在自动机上。自动机的运动部分将沿着俯仰摇架上的支撑轨道向后运动(ox轴负方向)。推进反力的作用时间较短,设推进反力为Ftf,其方向与ox轴平行。在俯仰摇架上设有缓冲装置,其缓冲力为Fh,方向沿ox轴正方向,经过回转中心O,作用在自动机的运动部分。
为方便计算,将缓冲力数学模型简化为:

式中:c为缓冲阻尼系数,v为运动速度,k为缓冲弹簧的刚度系数,Δs为缓冲簧压缩量。
自动机支撑轨道处存在摩擦力,设为Ff,其作用方向与ox轴平行,与运动方向相反。
2.1 推进n个待推进物的力矩分析
自动机选取推进单元时,应尽量以自动机中心轴线为对称轴来选取,这样可避免推进反力对回转中心轴产生力矩。将系统的合力矩研究分为两个阶段进行分析,计算中选取顺时针为力矩的正方向。
a)剧烈冲击载荷作用下的力矩

b)剧烈冲击载荷作用结束后的力矩

以下为对式(1)、式(2)中的推导与细化[4]
1)非运动部分重力矩

式中:lb为非运动部分对回转中心O的力臂,Wb为质心在WOU坐标系下的横坐标,γb为非运动部分在俯仰角为零时,其质心和回转中心O的连线与水平线的夹角。
2)运动部分重力矩
在运动部分向后运动的过程中,已知其质心在XOY坐标系下的运动规律,而计算重力矩需要知道质心在WOU坐标系下的坐标,因此由坐标变换可得:
3)运动部分惯性力矩
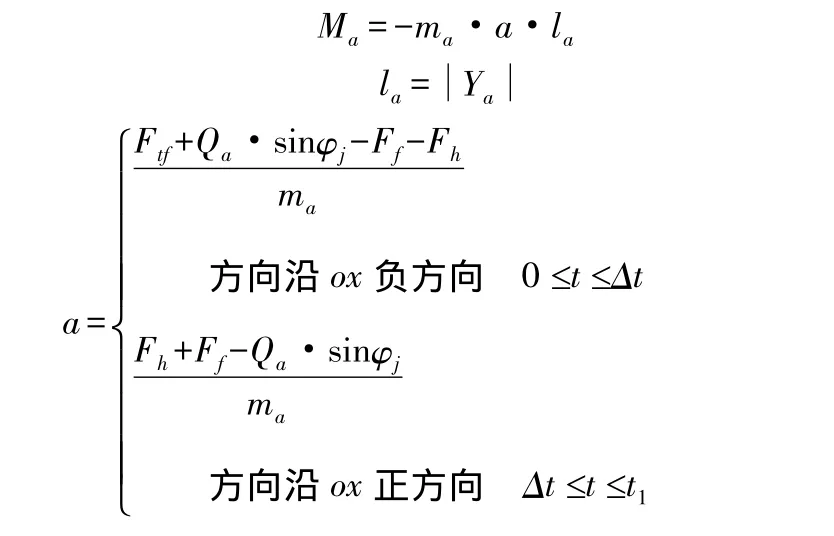
式中:ma为自动机运动部分的质量,la为惯性力-ma·a对回转中心O的力臂,Ya为其质心在XOY坐标系下的纵坐标,Δt为剧烈冲击载荷作用的结束时间。
4)推进反力力矩
式中:ltf为推进反力对回转中心o的力臂,Ytf为其质心在xoy坐标系下的纵坐标。
5)摩擦力矩
式中:μ为摩擦系数,lf为摩擦力对回转中心o的力臂,Yf为其质心在xoy坐标系下的纵坐标。
将推导细化中的各式带入式(1)、式(2),整理得剧烈冲击载荷下的力矩:
剧烈冲击载荷作用结束后的力矩:
2.2 不同俯仰角下系统的力矩计算
自动机的推进方式有很多种,但推进方式的应使推进力的合力经过回转中心O,或者使推进力的合力与回转中心的距离尽量小。这样可以减小自动机受到剧烈冲击载荷对回转中心产生的动态力矩。
选取推进14个待推进物,在不同俯仰角下的力矩的分析计算。按照前述原则选择推进单元,确定的推进方式由于其推进反力的合力与推进轨道中心轴线的距离很小,故近似取推进反力经过回转中心,因此式(1)中的推进反力力矩Mtf为零。同时对推进反力Ftf的数学模型进行简化,简化后其力特性图如图4所示,推进反力Ftf的最大值为490.62kN。
图4 Ftf力特性图
经过编程计算[5-6]可得M在受剧烈冲击载荷及缓冲过程中,俯仰角为0°、40°、80°时系统合力矩的变化规律,变化规律如图5所示。


图5 剧烈冲击载荷下系统的合力矩
自动机受到剧烈冲击载荷后,俯仰角度发生扰动,在力矩电动机和平衡机的作用下,俯仰角度的扰动量逐渐恢复到初始状态。取顺时针方向为角度扰动量的正方向,表1中列出了不同俯仰角度的扰动量及恢复时间。
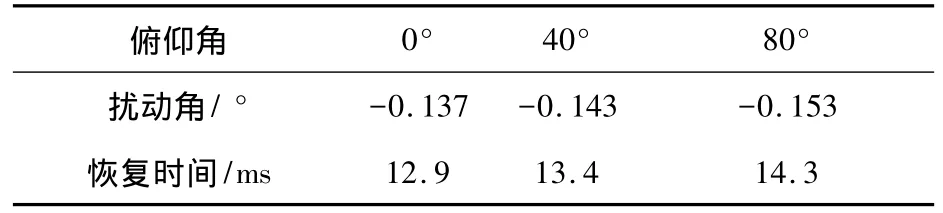
表1 俯仰角度扰动量
自动机在工作状态下,由于受到剧烈冲击载荷的作用,对回转中心产生了较大的力矩,同时自动机在俯仰角度上也存在扰动量。
3 结论
本研究对某新型自动机在剧烈冲击不平衡力矩条件下平衡机的动态特性进行了分析,分析中简化了部分参数的数学模型。

通过对某新型自动机在剧烈冲击不平衡力矩条件下系统动态力矩的分析,为平衡机的设计与优化提供了重要参考。
[1]谈岳斌,张相炎,关红根.火炮概论[M].北京:北京理工大学出版社,2005.
[2]康郦,胡月,朱承邦.新型舰炮平衡机的分析与计算[J].中国舰船研究,2009,4(2):73-77.
[3]丛伟,程云阶.扭力平衡机设计的探讨[J].沈阳航空工业学院学报,1999,16(3):25-32.
[4]哈尔滨工业大学理论力学教研室.理论力学(Ⅰ)[M].北京:高等教育出版社,2002.
[5]周元哲.Visual Basic程序设计语言[M].北京:清华大学出版社,2011.
[6]刘卫国.Visual Basic程序设计实践教程[M].北京:北京邮电大学出版社,2009.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
数学物理学报(2021年3期)2021-07-19
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
西北大学学报(自然科学版)(2018年2期)2018-04-18
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
