
基于MATLAB的折臂式高压隔离开关机构动态分析
2013-10-18 08:03张帆汤文成王鹏李巍
机械制造与自动化 2013年5期
张帆,汤文成,王鹏,李巍
(1.东南大学机械工程学院,江苏南京211189;2.江苏泰事达电气有限公司,江苏泰州 225300)
0 引言
高压隔离开关一般与高压断路器串联部署,是一种应用广泛且十分重要的高压配电设备。折臂式高压隔离开关由驱动机构和开、合闸机构组成,机构的运动规律由杆件和齿轮的尺寸决定。目前针对高压隔离开关机械特性的研究仍然偏少,高压隔离开关机构的性能还有一定的提升空间。国内外电器公司通常采用新材料、新技术、新工艺,对隔离开关的触头回路系统、传动系统、操动机构以及支架不断进行改进设计,以不断地提高产品的技术参数、完善产品性能,使产品的绝缘结构、通流能力和机械传动等方面更加可靠耐久。
从本质上分析与研究折臂式高压隔离开关机构设计变量对机构性能的影响具有重要的意义。对机构的运动学分析是评价机构性能的一个重要手段,不仅可以验证机构实现规定功能的可能性,而且运动学分析是机构动力学分析的基础。机构运动分析的目的在于确定机构中各构件的位置,以及一些构件上特定点的轨迹,从而确定机构的行程。同时,可以确定机构的角速度、角加速度以及某些特定点的速度和加速度等运动参数,这些参数是评价机构运动和动力性能的基础。总之,运动分析是了解分析机构的基本手段。
1 机构运动分析的关键解析方法
本文应用矢量环(矢量链)方法对机构的运动进行求解分析,高压隔离开关机构分为曲柄摇杆机构和开合闸机构,曲柄摇杆是闭合的矢量环,开合闸机构是类似于机器人手臂的矢量链,采用这种方法能够很好的对机构的位置进行求解,折臂式高压隔离开关的机构简图如图1所示。
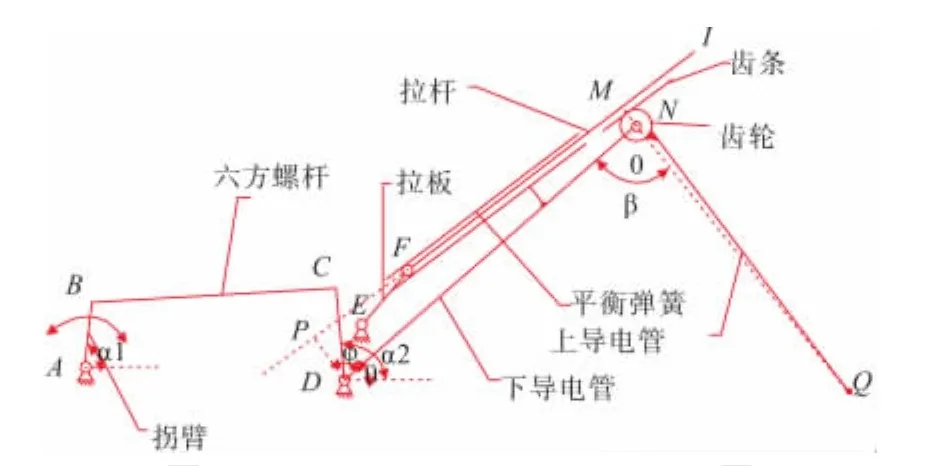
图1 折臂式高压隔离开关机构简图
如图2所示,是驱动机构(曲柄摇杆)简化矢量环图,按照矢量加法原则,两对矢量(R2,R3)和(R1,R4)相加的结果应相等,得到的数学表达式为:

式(1)表明矢量R2和R3相加所得到的位移矢量和矢量R1和R4叠加所得到位移矢量是相同的。规定水平线正方向逆时针旋转到矢量端的角度为正,分解闭环矢量方程得到两个分量表达式为:
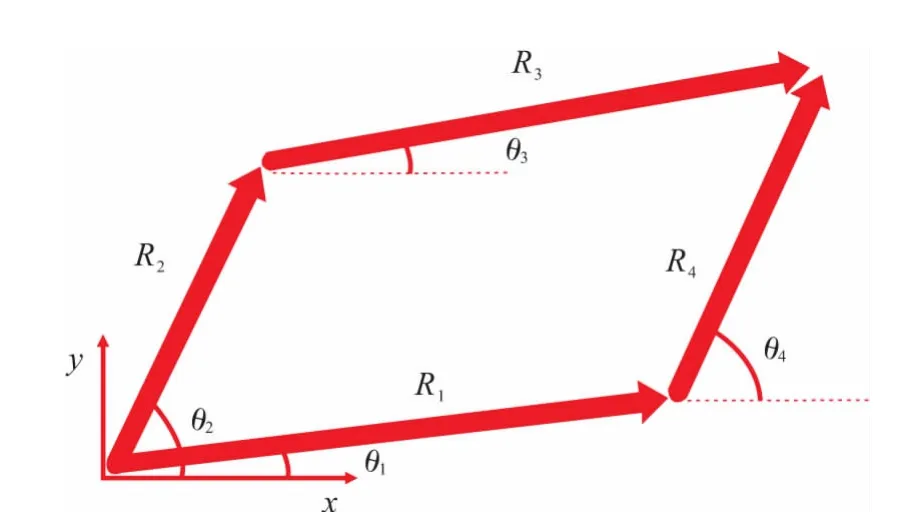
图2 驱动机构的闭环矢量图

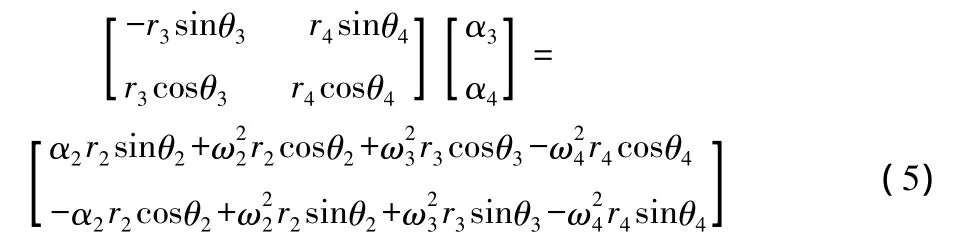
矢量夹角随时间变化,所以需对式(2)、(3)进行求导,角度θi对时间的一阶导数为角速度ωi,角度θi对时间的二阶导数为角加速度αi,在运动分析中,规定曲柄的转动是匀速的,这也符合高压隔离开关的运作要求,所以ω2是一定值,求导结果写成矩阵的形式:

同理,规定曲柄的角速度ω2和角加速度α2已知,闭环矢量方程二阶导数写成矩阵的形式如下:
如图3所示是合闸机构简化后的矢量链图,铰链点处的转角θ5和θ6是水平线和各自杆轴线形成的逆时针夹角。从坐标原点到动触头终点的矢量是上下导电杆的位移矢量之和,即:

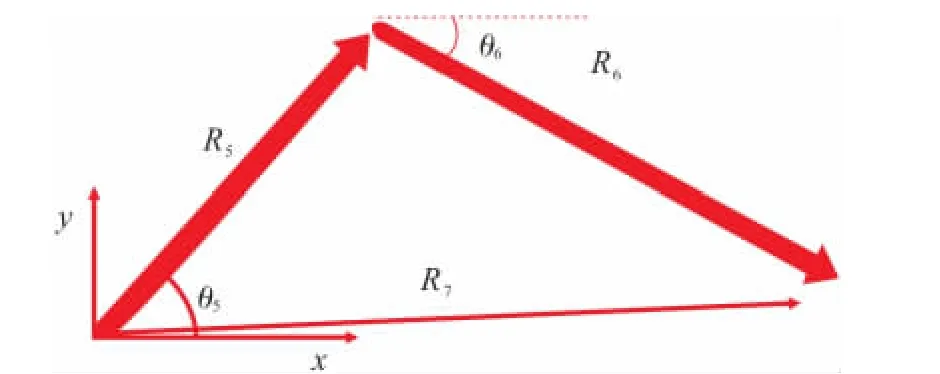
图3 合闸机构的矢量链图
R7没有与机构中的连杆固结或运动,所以将矢量R7写成坐标投影形式如下:

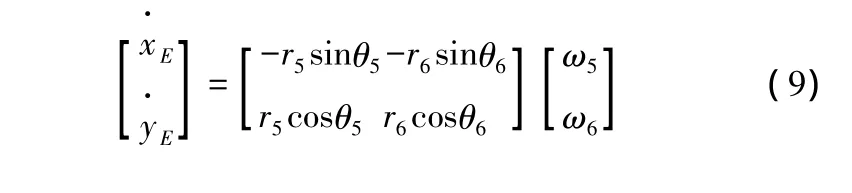
同理,对上面的方程求导,然后将其写成矩阵的形式:
2 机构运动仿真模型的建立
2.1 GUI对象的建立
MATLAB中的DUIDE提供了多种设计模板,可以轻松建立需要的GUI对象,同时自动生成对应的M文件框架,这样可以很大程度上简化GUI应用程序的创建工作。可以直接使用这种框架编写函数代码,GUIDE模板中包含相关的回调函数,可以打开对应的M文件,查看或修改函数,实现所需的功能。
如图4所示,机构的参数输入界面,参数输入控件和显示控件放在控制面板(panel)内,控件包含:编辑框(Edit Text),静态文本(Static Text),坐标轴(Axes),弹出式菜单(Pop-up Menu),按钮(Pushbutton)和控制面板(Panel)。输入参数包含:曲柄长度(AB),连杆长度(BC),摇杆长度(DC),机架长度(AD),下导电杆长度(DO),上导电杆长度(OQ),齿轮(MO),曲柄转速(n)和曲柄转向(顺时针、逆时针)。
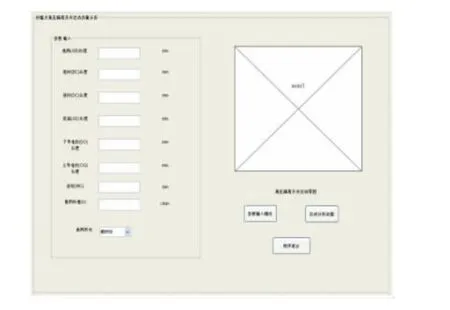
图4 机构参数输入界面
输入界面右侧为高压隔离开关机构运动简图的显示控件,下侧三个按钮分别为:参数输入确定、运动分析动画和程序退出。
图5为机构动态分析输入和显示界面,主要功能是实现仿真动画、部分机构角速度、角加速度和机构位置的输出。控制框右侧实现仿真次数的控制、开始仿真和程序退出的功能。

图5 机构动态分析输入与显示界面
2.2 机构参数关系的建立
驱动机构(曲柄摇杆)位置求解通过非线性数值求解方法求的,摇杆DC和下导电杆DO固连,两杆之间的夹角CDO为定值。上导电杆OQ的转角由下导电杆DO与拉杆EF之间的相对位移和齿轮分度圆直径决定。
曲柄按照0.5°的步幅旋转,调用非线性求解程序Untitled123,求的720组机构的位置解。一般来说,牛顿-辛普森法所求得的结果依赖于给定的初始估计,所以估算曲柄摇杆处于死点(高压隔离开关处于合闸位置)时杆件的转角,每次求得的位置解接近下一个位置解,所以在求下个位置解时,曲柄转角等量增加,其他杆件的估算位置解继承上一位置解,这样可以加快计算速度,并且可以避免得到我们不需要的位置解,求解程序如下:

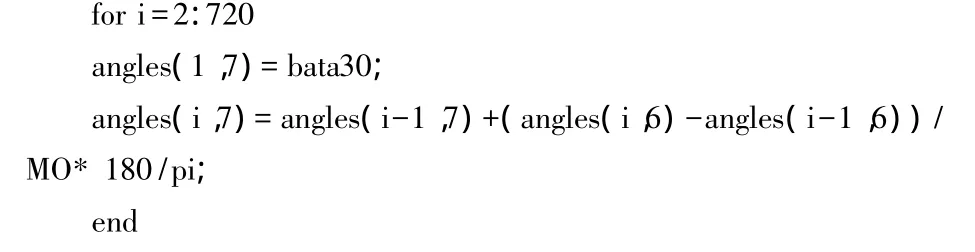
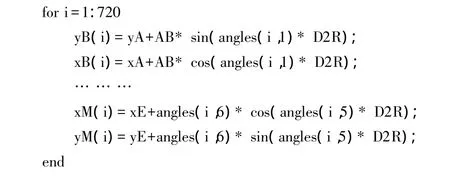
求得的720组解贮存在矩阵angles里面,拉杆EF的长度是不断变化的,这样才能带动上导电杆转动,每次上导电杆转动的角度是拉杆EF长度变化和齿轮分度圆半径的比值。规定上导电杆在合闸位置的初始值,实现程序如下:
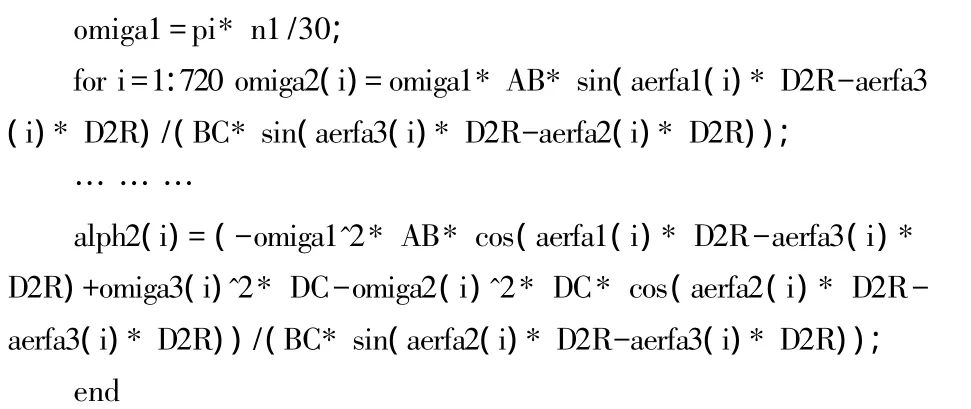
求得位置解后,继续考虑杆件角速度和角加速度之间的关系,一般规定曲柄的角速度为定值,角加速度为0,可以按照矢量环(矢量链)方法求的上述参数之间的关系,实现程序如下:
进行上述计算后,得到机构转角、角速度和角加速度之间的关系,最后还要关心机构铰链处的坐标,实现的程序如下:
2.3 机构动态显示
结构的动态显示是对上述求得的位置解的可视化显示,通过MATLAB自带的图形输出功能,实现对机构的动态显示。显示的内容包括:铰链、杆件、机架和齿轮。
显示的数据来源于位置求解的结果,实现参数输入确定的GUI界面如图6所示,参数输入确定后,点击视图中的参数输入确定,根据相关程序计算曲柄在旋转一周的过程中机构的位置。点击运动分析动画,实现机构的动态仿真显示。

图6 参数输入确定界面
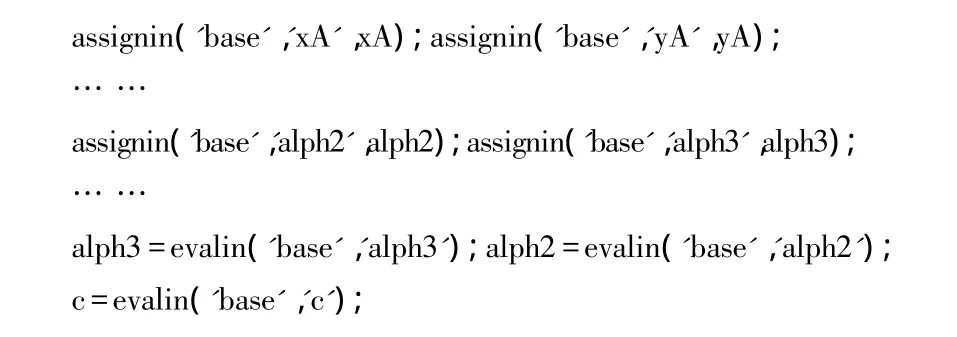
MATLAB的基本工作空间是‘base’空间,但各个工作空间之间的变量是不能直接引用的,而对于脚本文件来说,其工作空间与基本工作空间‘base’是可以共享的,其运算中用到的中间变量也会在基本工作空间‘base’中保留。所以为了实现工作空间的共享,用assignin函数为工作空间的变量指派值,用evalin函数实现工作空间中某个表达式字符串,并将结果返回。实现程序如下:
实现位置求解工作空间与基本空间‘base’共享后,根据计算结果实现机构初始位置的显示,定义线的颜色、点型大小和擦拭方式。对于杆件的显示定义使用MATLAB中的line函数,以曲柄AB为例,初始条件的实现程序如下:

铰链的初始位置是以点坐标为基础,添加相应的线的颜色、点型大小和擦拭方式等。以A点为例,实现程序如下:

齿轮的位置由O点坐标决定,形状为圆形,直径是齿轮分度圆直径,对圆形图案的显示由函数rectangle完成,rectangle函数用来显示矩形框图,但是可以控制矩形的圆角来实现对圆形框图的显示,同时函数可以设置线形、线宽、颜色、擦拭方式和显示依赖的坐标图,函数表述如下:

初始位置确定后,要实现机构的运动分析,根据机构位置解,不断地修改机构的位置,不断刷新屏幕,实现机构的动态仿真。这一过程用while循环控制,mm参数是用来控制仿真次数,实现程序如下:

运动分析不只关注机构的运动动画,对于部分构件的运动角速度、角加速度等也需要较为直观的显示。本文在动态分析部分加入了4个坐标图,分别为:动触头的坐标图、下导电杆角位移图、下导电杆角速度图和下导电杆角加速度图。动态显示如图7、8所示。
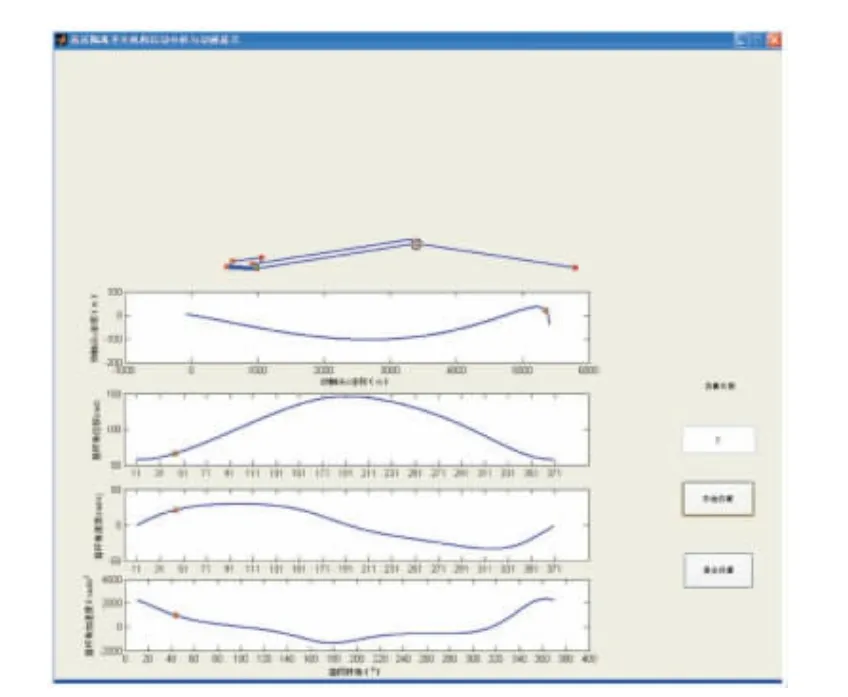
图7 动态显示(一)
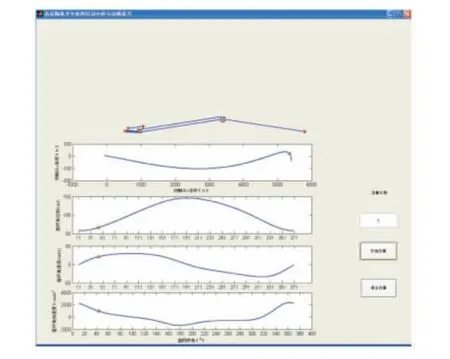
图8 动态显示(二)
3 机构运动仿真模型的验证
3.1 基于ADAMS仿真模型的建立
在三维软件PROE中建立折臂式高压隔离开关的模型,并导入到仿真分析软件ADAMS中,根据折臂式高压隔离开关的运动关系,建立铰链副、齿轮齿条副、滑动副等,建立的仿真分析模型如图9所示。
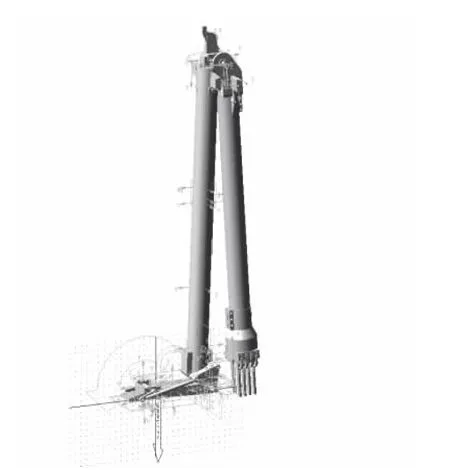
图9 基于ADAMS的仿真分析模型
3.2 结果对比
选择动触头的运动轨迹作为结果对比的对象,分别提取基于MATLAB和ADAMS的运动仿真分析结果,对比结果如图10所示,(a)为MATLAB计算分析结果,(b)为ADAMS计算分析结果。结果显示基于MATLAB的折臂式高压隔离开关机构的动态分析能够正确直观的反映机构的运动状态,模型参数易于修改,适合高压隔离开关的初期设计。
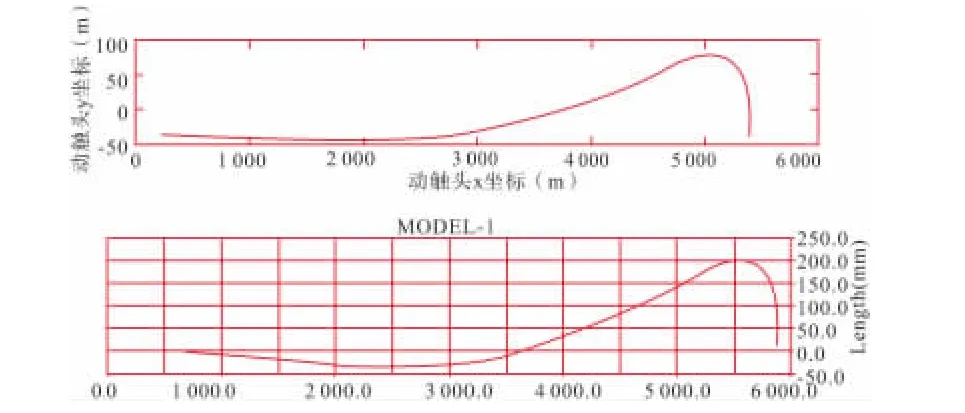
图10 仿真分析结果对比验证
4 结语
通过建立高压隔离开关机构的运动学方程,建立各个杆件之间的位置、速度和加速度之间的关系。并通过牛顿-辛普森法对非线性位置求解方程进行求解,得到曲柄在匀速转动过程中机构的位置和相对应的速度、加速度等参数。并通过MATLAB自带的GUIDE实现对高压隔离开关机构的运动分析和动画显示,运动分析数据来源于对运动学方程的求解。在GUIDE中添加相关控件,实现机构运动学方程的计算和机构动画的显示。
通过ADAMS仿真分析软件对基于MATLAB的折臂式高压隔离开关的动态分析结果进行了验证,结果显示基于MATLAB的折臂式高压隔离开关机构的动态分析能够正确直观的反映机构的运动状态,模型参数易于修改,适合高压隔离开关的初期设计。
[1]苑舜,崔文君.高压隔离开关设计与改造[M].北京:中国电力出版社,2007.
[2]李建基.高压开关设备实用技术[M].北京:中国电力出版社,2005.
[3]周进雄,张 陵.机构动态仿真:使用MATLAB和SIMULINK[M].西安:西安交通大学出版社,2002:12-14.
[4]杜志强,葛述卿,房建峰.基于MATLAB语言的机构设计与分析[M].上海:上海科学技术出版社,2011.
[5]张策.机械动力学(第二版)[M].北京:高等教育出版社,2008.
[6]Cabrera J A,Simon A,Prada M.Optimal synthesis of mechanisms with genetic algorithms.Mechanism and Machine Theory,2002,37:1165-1177.
[7]高志.高压开关操动机构的动态仿真及优化设计[D].保定:华北电力大学,2005.
[8]刘丽芳,徐鹏云.MATLAB在平面机构运动仿真中的应用[J].计算机应用技术,2006(8):27-28.
[9]岳修科,黄俊杰.MATLAB在平面机构运动解析法分析中的应用[J].保定学院学报,2008(4):50-52.
[10]孙恒,付则绍.机械原理[M].北京:高等教育出版社,1995.
[11]陈 杰.MATLAB宝典[M].北京:电子工业出版社,2008.
猜你喜欢
机械工程师(2021年4期)2021-04-19
小天使·一年级语数英综合(2020年5期)2020-12-16
液压与气动(2020年4期)2020-04-10
设备管理与维修(2019年22期)2019-12-19
机械研究与应用(2018年5期)2018-11-05
新课程·下旬(2018年10期)2018-01-28
大连工业大学学报(2015年4期)2015-12-11
智能建筑电气技术(2015年5期)2015-12-10
计量学报(2014年3期)2014-06-07
河南科技(2014年16期)2014-02-27
