
竞走运动员下肢能耗模型的建立及运动学参数分析
——以太仓国际田联竞走挑战赛我国优秀女子运动员为例
2013-10-26 08:56朱兴涛
体育研究与教育 2013年5期
朱兴涛,于 芳,贾 谊
竞走项目属于耐力性项目,竞走技术的合理性对竞走运动员的体能有着重要的影响,因此,研究竞走动作技术与能耗的关系对竞走比赛成绩有着重要的意义。我国竞走运动有“小步幅,快频率”的传统技术风格,为了提高成绩,笔者从物理学、运动生物力学和人体解剖学基础理论出发,对竞走技术进行理论能耗模型研究,以提高竞走运动员能耗的利用率。同时针对个体运动员的自身条件和竞走技术,量体裁衣,对步长、步频、关节角度等竞走技术训练理念进行了创新研究。
1 研究对象与方法
1.1 研究对象
以太仓国际田联竞走挑战赛45号运动员竞走技术参数进行研究,测试对象身高168cm,体重55kg,个人最好成绩1小时28分43秒。根据《现代运动生物力学(第二版)》人体基本参数[2],并从中提取文章所要涉及的部分,中国青年女性几何尺寸及质量、质心见表1。
通过对该运动员的实际参数和中国青年女性几何尺寸及质量、质心统计参数的对比身高L有:L身-L参=168 -158.891 7=9.108 3,比例系数 r=9.108 3/45.625=0.2。由此可以计算出运动员的个环节长度及质量。
M=M参+标准差 ×0.2
L=L参+标准差 ×2
下肢环节的质量:
M大腿=7.388 8kg
M小腿=2.360 4kg
M足=0.721 2kg
下肢环节的长度:
L大腿=461.225 2mm
L小腿=350.135 6mm
L足=230.314 4mm

表1 中国青年女性几何尺寸及质量、质心统计表
1.2 研究方法
1.2.1 文献资料法 通过中文期刊网、中北大学图书馆,山西省图书馆等广泛阅读国内外相关的文献资料,参考有关人体解剖学、现代生物力学、运动生理学和竞走相关专著,对我国优秀竞走运动员的技术参数、运动能耗和研究现状进行全面了解。
1.2.2 平面定机拍摄 比赛现场拍摄于2011年4月22日—24日在太仓国际田联竞走挑战赛。使用Panasonic-AG-DVC180BMC摄像机一台,对比赛现场进行平面定点定机拍摄。摄像机主光轴垂直于运动平面,设定拍摄频率为50Hz,拍摄距离为12m,机高 1.2m,曝光时间 1/100 0s[3]。比赛前在拍摄范围内设定比例尺,比例尺长度为2.5m。采用地面黏贴标尺的方法进行标定,解析时以胶布外沿做为标定点进行标定[1]。利用图像处理技术对人体各个姿态进行分析。通过对采集的序列图像进行解析,利用三维建模分析运动状态、位置信息。
1.2.3 影像解析法 使用Ariel公司APAS运动生物力学分析系统对运动员动作录像进行人工数字化处理。选取运动员一个复步(即左着-右着-左着或右着-左着-右着)的动作进行研究,并对动作过程前、后分别额外多取10幅画面进行解析。解析时使用松井秀治人体惯性参数模型,并选取19个关节点。通过低通数字滤波法进行平滑处理,平滑系数为8,获取原始数据。运动员第一圈、第二圈、第三圈、第五圈、第六圈、第七圈、第八圈、第九圈和第十圈(第四圈拍摄时大部分被遮挡所以舍去)数据见表2。

表2 运动员步长与腾空时长统计表
2 结果与分析
人体下肢的运动学建模,实际上就是求解摆动脚的位置、速度等运动状态与各关节相对角度之间的运动关系。以系统中关节点作为出发点,运用传统的理论力学矢量合成原以及刚体位置、速度等为基础,针对人体下肢进行多刚体系统的运动学分析。根据人体的结构和运动力学的分析,建立人体下肢运动数学模型,结合课题的研究背景,选用拉格朗日建模方法,从系统能量角度出发构建人体下肢的动力学模型。拉格朗日法以系统能量角度出发,通过系统的动能和势能来建立拉格朗日能量函数,只需要速度而不需要求得内作用力,通过能量函数对系统的广义坐标变量进行求导,来建立系统广义坐标变换之间的数学关系[8]。
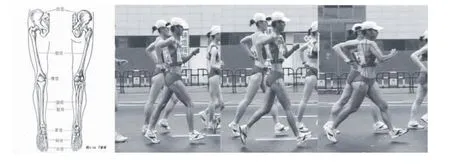
图1 运动员竞走过程视频的平面处理
从竞走技术定义来看,竞走就是一个“复合移动钟摆运动”[3],将人体下肢简化为平面的二刚体二自由度模型(见图1)。一个完整、复杂的运动过程可以看作是由一些简单的动作组成。通过准确测量这些基本动作的能量消耗和效率,进而推测整个运动过程的能量消耗和效率。这种动作分解测量方法是可行的[4]。本文只研究运动员在竞走方向上下肢动势能和竞走技术参数之间的关系。
对竞走运动员下肢进行抽象模拟,利用Bharatkumar棍棒模型对人体下肢进行建模[2]。从实际图像序列中测量和平滑人体下肢个段的角度和关节的位移量,然后测出每个竞走周期共同的运动学参数。H为髋关节所在,k为膝关节,a为踝关节;m1、m2、m3分别为大腿、小腿和足的质心所在[7];K表示环节动能,P表示环节的势能(见图2)。
选取笛卡尔坐标系,髋关节坐标为O1,膝关节坐标为O2,踝关节坐标为O3;大腿和小腿的关节变量分别是转角θ1和 θ2;大腿、小腿和足的质量分别为 m1、m2和 m3;腿长分别为 l1和 l2,足长 l3。因此,足质心坐标为基准坐标,足质心位于踝关节下距离忽略不计,所以足质心坐标为(0,0),小腿质心c2坐标为:


图2 运动员下肢模型
大腿质心c1的坐标为:

单腿的动能:
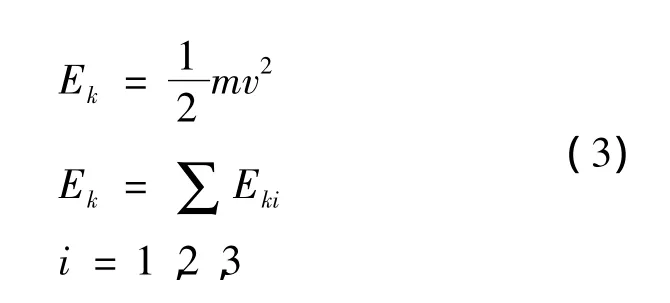
系统势能:
3 竞走参数与能量之间的关系
研究的过程中选取竞走运动员在竞走过程中大腿的最大关节角度、膝关节最大关节角度和各关节点瞬时最大速度时刻的能耗与技术参数的相关分析。
3.1 步长与动能的关系
通过对运动员的整个竞走比赛过程拍摄视频进行处理,分析得出比赛中同一地点竞走运动员的步长和人体重心速度,见表3。

表3 运动员步长及人体重心速度
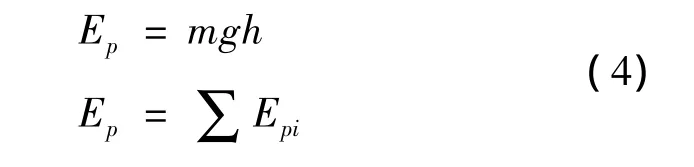
从整个拍摄画面中分析,在运动员腾空时刻运动员的步长达到最大,此时以运动员着地脚质心为坐标原点建立下肢参数模型,见图3所示。经过图像平面处理,得出竞走运动员各圈下肢各环节与地面的关节角度及关节点的相对应的瞬时速度见表4。
表4 运动员各圈下肢运动学参数
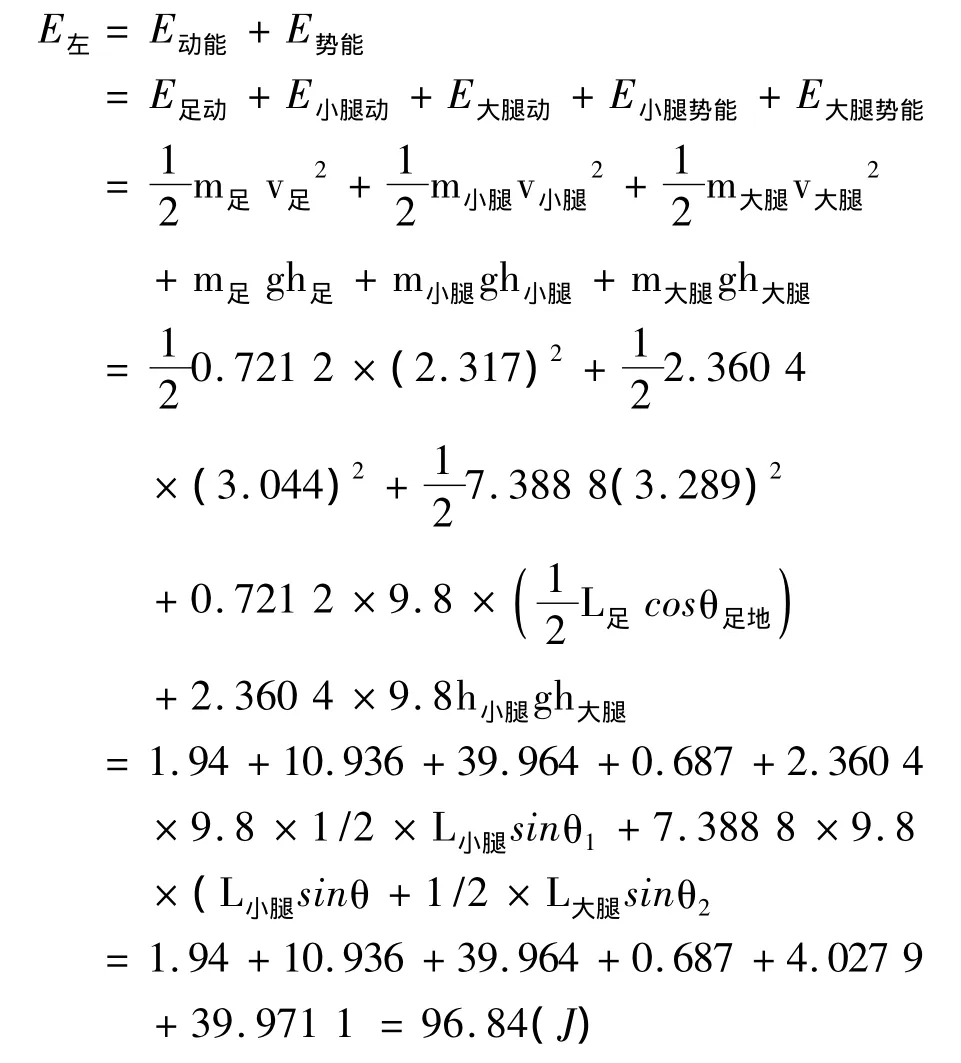
竞走运动员下肢的能量

对竞走运动员左下肢进行能耗分析,在竞走运动员腾空的瞬间,左下肢足、小腿、大腿都有受到地球吸引产生的重力,在竞走能耗中以重力势能的形式表现,同时足、小腿、大腿在水平方向上有速度,在水平方向上的能量以动能形式存在。而且根据中国青年女性各环节基本参数及中国青年女性几何尺寸及质量、质心统计可以计算出该竞走运动员的下肢各环节的相对质量和环节长度,M大腿=7.388 8kg,M小腿=2.360 4kg,M足=0.721 2kg,L大腿=461.225 2mm,L小腿=350.135 6mm,L足=230.314 4mm。各环节质心的高度为hX,而g为重力参数9.8m/s2。能量单位为焦耳(j)。所以第一圈竞走运动员腾空时刻的能量:
同理得右下肢的能量:
E ≈117.155 1j
第一圈竞走运动员在拍摄点腾空时刻下肢总能量为:
E总=213.995j
同理,可以计算出每一圈竞走运动员在拍摄点腾空时的下肢能量(见表5)。
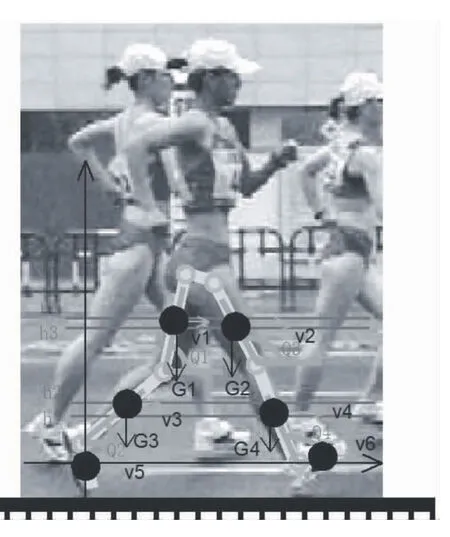
图3 竞走运动员下肢参数模型图

表5 运动员腾空下肢能量统计表 (单位:j)
由表3和表5可以看出,竞走运动员的步长与下肢动能的关系,步长与运动员下肢动能有相关性。由图4可见,该竞走运动员的步长与下肢动能有相近的变化趋势。

图4 步长与能量的关系折线图
为了进一步研究步长和动能的关系,结合表1竞走运动员每一圈在拍摄点的重心速度和步长,求解步长与动能的关系。运动员整体动能为Ek(单位j)、k为圈数。
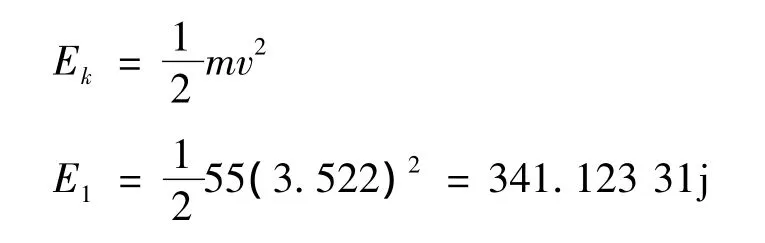
同理
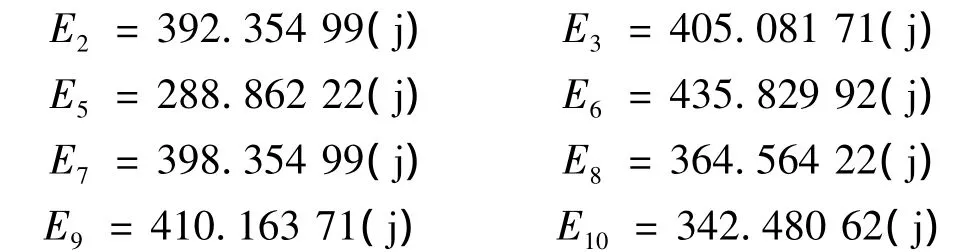
对竞走运动员的动能和步长做相关分析,动能和步长变化趋势图见图5。

图5 比赛全程竞走运动员的步长与动能变化趋势图
由图5分段解析可以看出,步长与动能之间存在相似关系。当步长增大的时候动能随之增大,反之亦然。动能由质量与速度决定。当运动员质量相同时,运动员的速度与步长就通过动能建立了相似关系;同时运动员的动能也反映出了运动员的竞走速度。运动员在整个竞走过程中,速度稍有波动,变化不明显,说明该运动员耐力好,运动员的运动能力在竞走中影响着竞走的技术参数。由图4、图5可以分析出,竞走运动员的步长和运动员的动能成正比例关系。
3.2 关节角度与能耗的关系(见表6)
竞走运动员在一个复步周期中,当脚离地面时,瞬时位移速度最大;当前支撑着地过渡到垂直阶段时,瞬时位移速度最小,此期间的速度损失率可以作为一个重要技术指标[6]。对踝关节角度与动能的关系,选取竞走运动员在整个比赛过程中同一地点的腾空时刻图片进行分析。

表6 竞走运动员每圈各关节的最大关节角度 (单位:°)
踝关节角度的变化率能反映竞走运动员的步频。在竞走运动员前摆动脚脚跟着地,经过周期性的向前运行,踝关节的角度是一个变小然后增大的变化过程。踝关节的角度变化率越大,步频越快,间接说明竞走的速度越大,由上面提到的速度增大,则对应的动能增大。简化为踝关节角度变化率与动能成正比。
从左踝关节角度看,腾空瞬时的踝关节角度呈增大的趋势。右踝的关节角度先减小后又增大,角度的波动,应引起教练注意。该波动说明连接右踝关节的环节可能受伤或者其他原因。运动员在竞走的过程中,随着时间推移,小腿的疲劳度增加将导致肌肉弹性下降,也说明体能将呈下降趋势(见图6)。从关节的连贯性看,此运动员右膝关节受损。但是在比赛中出现此类情况,会遭到裁判员的判罚,影响竞走成绩。
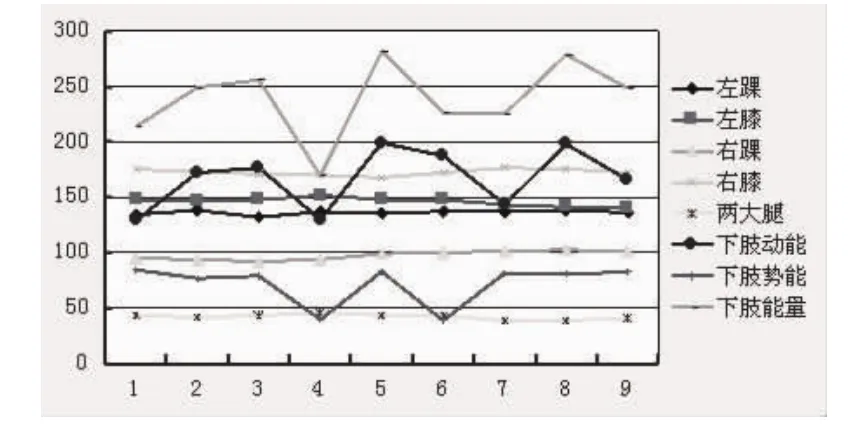
图6 关节角度与能量关系趋势图
从竞走的一整个摆动周期来看,后摆阶段关节角度变化率增大是为后蹬离地阶段摆动腿的快速前伸贮备能量。降低重心的起伏,增大大腿夹角可提高水平方向上的速度。两大腿的夹角最大的时刻并非是腾空时刻(腾空时刻步长最大),两大腿的夹角和步长有着紧密的联系。两大腿在整个摆动周期中最大角度的变化,步长与角度呈正比例变化。大腿的角度说明运动员在竞走中,经历了开始阶段、适应期、平衡期以及下降期的整个过程。随着运动员体能的不断消耗,动作的幅度会出现变化,接下来主要靠运动员的意志力控制肢体动作。从运动员下肢来看,在运动员的选材方面,身高对步长有一定的影响,下肢长意味着步长大。运动员的柔韧性对步长也有影响,教练员在训练的过程中应该加强运动员的柔韧性练习。
4 结论
经过数据分析发现,摆动分为前摆阶段和后摆阶段,在摆动周期内各阶段摆动腿的速度、摆动角度都不相同。摆动腿摆动半径的大小是由膝关节角度决定的。膝关节角度在两个阶段都没有出现锐角,皆为钝角。膝关节前摆角度接近后摆角度的两倍,膝关节角度变化在90°~180°范围内,变化范围大,能量损耗大;合理的最小摆动腿膝角应控制在 100°~110°之间[9]。
膝关节角度的变化与摆动时间的长短存在着密切的关系。左膝关节角度随着竞走距离和时间的增长而减小,说明后摆腿在摆动过程中出现迟缓。右膝关节角度变化和右踝关节变化趋势一样,
(1)竞走运动员的步长和腾空时间;步长与下肢动能成正比例的关系,腾空时间越长步长越大。
(2)踝关节角度速度的变化率是竞走中凸显竞走运动员摆动技术的关键。踝关节角度变化越快前摆动腿获取的能量越大,后摆动腿的蹬地为竞走运动员在水平方向上增加动能,达到增大竞走的速度。
(3)步长越大,踝关节角速度越大,竞走速度就越快;大腿的夹角 69.311 ±6.132°,大腿的夹角影响着步长,所以运动员应该有自己的技术风格,选用适合自己的动作技术,有利于能耗降低,使整个过程的节奏连贯。
[1]贾谊,严波涛,李厚林.对中、外优秀竞走运动员关键动作技术特征的运动学分析[J].中国体育科技,2011,47(4):8~13.
[2]郑秀媛,等.现代运动生物力学(第2版)[M].北京:国防工业出版社,2007.
[3]李厚林.“复合钟摆”运动生物力学原理在竞走技术创新中的应用研究[J].西安体育学院学报,2013,30(2):196~203.
[4]严波涛,高新友,张伯强,等.人体运动能耗和效率的动作分解测量方法[J].中国临床康复,2006,40(10):34 ~36.
[5]李汀,李爱东,苑廷刚.优秀竞走运动员比赛全程的时间结构研究[J].中国体育科技,2010,46(4):3 ~9.
[6]郎雪梅,纪仲秋.我国优秀女子竞走运动员竞走技术的生物力学分析[J].中国体育科技,2003,39(4):31 ~35.
[7]卢德名,王云德,严波涛.运动生物力学测量方法[M].北京:北京体育大学出版社,2002.
[8]洪晓明.人体下肢运动力学分析与建模[M].杭州:杭州电子科技大学,2009.
[9]宗华敬.对世界冠、亚军刘宏宇、王妍竞走技术的研究[J].体育科学,2000,20(6):38 ~40.
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
汽车实用技术(2022年14期)2022-07-30
成都信息工程大学学报(2021年5期)2021-12-30
北京航空航天大学学报(2021年4期)2021-11-24
中国惯性技术学报(2020年2期)2020-07-24
中国临床医学影像杂志(2019年6期)2019-08-27
北京航空航天大学学报(2016年12期)2016-02-27
应用科技(2015年5期)2015-12-09
红领巾·萌芽(2015年5期)2015-06-16
少年科学(2015年4期)2015-05-07
