
太阳帆航天器姿态控制技术综述
2013-11-28 02:22韩艳铧张震亚
航天器环境工程 2013年6期
韩艳铧,张震亚,贾 杰
(1. 南京航空航天大学 航天学院,南京210016;2. 南昌航空大学 信息工程学院,南昌330063)
0 引言
随着航天器飞行的距离越来越远,在轨任务的时间变得更长,意味着依靠传统的反作用力推进的航天器在发射时需要携带更多的工质和能源,从而导致航天器的发射质量随之增加,进一步增加发射阶段的难度和成本。
近年来,太阳帆作为一种新型航天器推进手段受到瞩目。航天器通过搭载大面积、轻质量的薄膜型太阳帆所产生的太阳光压获得推进力。太阳帆推进技术不再需要依靠推进剂的喷射消耗,可降低航天器发射的成本与难度[1-4]。2010年5月21日,日本宇宙航空研究开发机构(JAXA)成功发射了星际太阳辐射驱动风筝航天器(Interplanetary Kite-craft Accelerated by Radiation Of the Sun,IKAROS),是航天史上首次成功发射的太阳帆航天器,标志着太阳帆技术研究迈出了里程碑式的一步。
与传统航天器相比,太阳帆航天器具有以下特点:
1)帆面质量极小。太阳帆面材料通常为聚合物薄膜材料,厚度极薄,质量极小。以 IKAROS为例,聚酰亚胺薄膜帆面积约为 130 m2,厚度为7.5 μm,帆膜部分的质量仅为1.849 kg[5-6]。
2)转动惯量巨大。太阳帆的直径通常为数十至数百米,其转动惯量巨大。以美国阿连特技术系统公司(ATK Space Systems)研制的边长为160 m、重440 kg的方形太阳帆航天器为例[7],其绕滚转轴的转动惯量达642 876 kg·m2,绕俯仰轴和偏航轴的转动惯量均为321 490 kg·m2,可见三轴的转动惯量远远超过普通航天器。
3)光压干扰力矩较大。由于实际装配误差以及帆面展开时的扭曲形变等因素,使得太阳帆实际质心与光压压心往往并不重合,太阳光压力会对帆面产生较普通航天器大得多的干扰力矩。以美国新千年计划Space Technology 7(NMP ST7)给出的40 m×40 m级太阳帆航天器[8]为例,其所受光压力约为0.01 N,设质心/压心偏距为0.1 m,则航天器所受的光压干扰力矩大小为0.001 N·m,达到普通地球同步轨道卫星所受光压干扰力矩的近100 倍[9]。
考虑到太阳帆航天器具有以上特点,若采用传统的控制执行机构(如动量轮系统或化学燃料推进器等)对其姿态进行控制,则势必需要消耗大量的能量或工质。因此,针对太阳帆航天器,必须设计新型的高效率、无大量化学推进剂消耗的姿控系统[10-11]。
1 太阳帆航天器姿态控制技术研究现状
自1999年欧洲航天局与德国宇航中心联合研制的第一个太阳帆实验模型面世以来,以美国、俄罗斯、日本等为代表的航天大国均在太阳帆推进技术领域展开了大量研究[1-6,11-14]。
然而,截至2013年,已成功发射的太阳帆航天器仅有日本IKAROS和美国“纳米帆-D”(Nano Sail-D),其余绝大部分太阳帆研究工作由于缺乏工程背景的支持仅局限于理论建模和地面试验。图1列出了几个太阳帆产品应用实例,包括两个成功飞行的和两个地面试验样品。
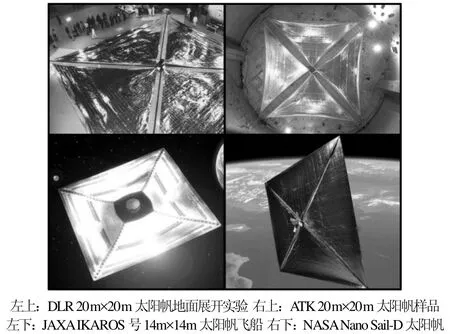
图1 太阳帆产品应用实例Fig. 1 Applications of solar sail products
目前国内外提出的太阳帆航天器姿态控制方案,按照控制策略不同,可分为自旋稳定控制方案和三轴姿态控制方案。其中,自旋稳定控制方案主要针对具有圆形帆或对称多叶片太阳帆结构的航天器,通过绕自旋轴的旋转产生稳定力矩,实现对日定向,为单轴被动姿态控制方式。三轴姿态控制则对太阳帆形状设计没有严格限制,主要思路均为利用太阳光压力产生姿态控制力矩。按照控制力矩产生原理的不同,可将太阳帆姿态控制思路分为帆面转动法、质心偏移法和帆体参数调整法3类。帆面转动法通过改变整体帆面或部分帆面的方向来产生光压姿态控制力矩,其执行机构可以为控制翼面或滚转轴稳定条等;质心偏移法通过改变太阳帆的质心与压心的相对位置,得到姿态控制力矩,其执行机构可以为带万向节的转动控制杆,或沿帆面结构杆滑动的质量块等;帆体参数调整法则是通过改变帆面的反射率、透光率等物理参数或者改变帆体的构型来调节部分帆面所受的光压大小,以产生光压控制力矩。根据实际姿态控制的任务需求,还可以采用以上控制思路的相互组合方案。
2 太阳帆航天器姿态控制方案
2.1 自旋稳定控制方案
太阳帆航天器的自旋稳定是利用陀螺控制使自旋的太阳帆保持稳定。由太阳帆质心/压心之间的偏距而产生的光压干扰力矩会使得帆面自旋轴线方向发生偏转,需要对此进行修正,即可利用脉冲式喷气控制方式施加章动力实现自旋轴定向的稳定控制。
Wie针对存在质心/压心偏距的太阳帆航天器进行了自旋稳定控制方案研究,推导了地心椭圆轨道太阳帆航天器的动力学方程,并以40 m×40 m级太阳帆航天器对日定向姿态控制为例给出了数值仿真结果[8]。
美国新千年计划ST5中采用了太阳帆自旋稳定方案[15]。太阳帆航天器尺寸为76 m×76 m,航天器的三轴转动惯量分别为 44 000 kg·m2、22 000 kg·m2、24 000 kg·m2,质心/压心偏距为±1 m,自旋角速度为0.45 (°)/s;通过脉冲喷气对太阳帆自旋轴的进动和章动进行控制,可保持自旋轴对日定向误差不超过 1°。
采用自旋稳定控制方案的太阳帆航天器可以借助自旋产生的离心力进行帆面展开,因而无需刚性支撑结构和自主展开机构。但在依靠推进器的喷气维持自旋稳定的同时,须依靠反作用喷嘴进行进动和章动控制,不仅增加了系统耗能和控制复杂度,而且还难以保证帆面平整度。
2.2 三轴姿态控制方案
考虑到航天器有效载荷工作时往往具有不同的定向要求(比如分别需要对地、对日定向),为此应采用三轴姿态控制方案。
下文提出的姿态控制方案主要针对方形太阳帆航天器(图2)展开研究。太阳帆由4片等腰直角三角形薄膜帆以及 4根从中心延伸展开后对帆面起支撑作用的结构杆组成。
图2 方形太阳帆航天器Fig. 2 Square solar sail spacecraft
为便于表述,统一规定方形太阳帆航天器绕结构杆的旋转为俯仰运动和偏航运动,绕帆面法线方向的旋转为滚转运动,如图3所示。
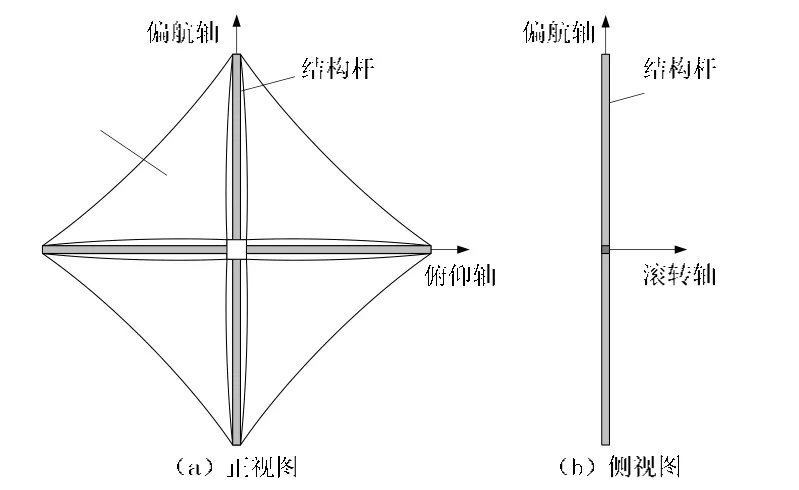
图3 方形太阳帆航天器结构Fig. 3 Structure of square solar sail spacecraft
2.2.1 基于控制翼面的姿态控制方案Derbes等[16]研究了一种利用控制翼面对太阳帆航天器进行姿态控制的方案。带有控制翼面的太阳帆航天器结构如图4所示。4片作为控制翼面的小三角形太阳帆安装于太阳帆结构杆末端处,可在电机驱动下绕结构杆旋转。当控制翼面旋转到某个合适的角度,利用作用于翼面的太阳光压力来产生对航天器三轴姿态控制所需的光压控制力矩。

图4 带有控制翼面的太阳帆航天器结构Fig. 4 Structure of solar sail spacecraft with control vanes
Mettler等[17]针对带有控制翼面的太阳帆航天器设计了一种非线性鲁棒姿态控制器,并给出了各翼面姿态控制力矩的分配算法。数值仿真结果表明,该姿态控制方案对太阳帆质心/压心偏距所产生的光压干扰力矩有良好的抑制作用。
Lawrence等[18]针对带有4片控制翼面的太阳帆航天器进行了轨道姿态耦合控制研究,通过调整4片翼面的角度来实现航天器三轴姿态控制。仿真结果表明,该控制方案对于太阳帆航天器初始姿态控制误差有良好的修正效果。
骆军红等[19]提出一种基于固定偏置翼面的太阳帆航天器被动姿态控制方案。令4片控制翼面均保持某一个固定偏置角,当航天器姿态偏离平衡状态时,固定翼面会产生光压稳定力矩,促使姿态回到平衡位置,航天器会围绕平衡位置振荡。由于系统阻尼的存在,使得姿态振荡的振幅逐渐减小,最终使各轴姿态趋向定常位置。数值仿真结果表明固定偏置翼面的太阳帆航天器被动姿态控制方案具有较好的对日定向性能,无需消耗工质,适合于任务周期长、姿控精度要求低的太阳帆行星际探测任务。
基于控制翼面的姿态控制方案所需执行机构简单,可对航天器三轴姿态进行主动控制,并可通过翼面固定偏置实现对日定向被动姿态稳定。缺点在于,受翼面尺寸限制,翼面可产生的实际控制力矩通常较小,当太阳帆姿态远离平衡位置时,往往需要引入其他辅助执行机构完成姿态控制。可考虑在上述控制方案基础上加入等离子体推进器,当姿态远离平衡位置时,利用等离子体推进器辅助控制翼面进行姿态控制[20]。
2.2.2 基于转动控制杆的姿态控制方案
Diedrich[21]提出了一种利用控制杆实现太阳帆航天器三轴姿态稳定的主动控制方案。作为姿态稳定的控制杆通过二轴万向节安装于帆面中心基座处,控制杆在电机驱动下绕结构杆作可控旋转,使航天器整体质心位置改变,相对于光压压心产生偏移,从而得到绕俯仰轴和偏航轴方向的姿态控制力矩。带有转动控制杆的太阳帆航天器结构如图5所示。
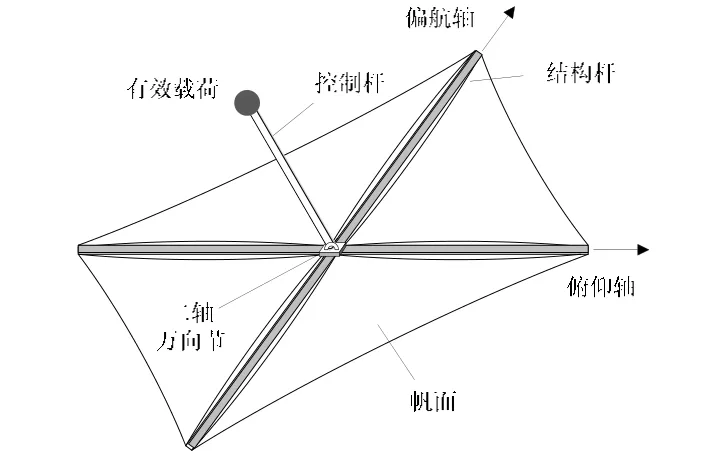
图5 带有转动控制杆的太阳帆航天器结构Fig. 5 Structure of solar sail spacecraft with rotary control boom
Wie[22]给出了带有转动控制杆的太阳帆航天器的俯仰轴刚体姿态动力学模型,并利用PID控制方法设计了姿态控制律。仿真结果表明,该方案可抑制各种干扰力矩对太阳帆航天器姿态的影响。
由于太阳帆航天器三轴姿态相互耦合,在利用控制杆调节俯仰角和偏航角的过程中,必然会引起滚转角的耦合响应。为了使滚转角保持稳定,需要在滚转轴方向引入辅助的控制执行机构。在实际太阳帆飞行任务中,滚转轴通常不需要大角度机动,因此该轴所需的控制力矩相对较小。可选用控制力矩沿太阳帆法线方向的反作用飞轮,或选用小功率的等离子体推进器等执行机构对滚转轴方向的姿态进行控制。
Wie等[23]设计了控制杆和控制翼面组合的两种执行机构的太阳帆航天器三轴姿态控制方案,通过引入控制翼面对滚转进行辅助控制,并以地心椭圆轨道上太阳帆航天器的姿态控制仿真算例验证了该方案的控制效果。
崔祜涛等[24]对安装有控制杆和反作用飞轮的太阳帆航天器,基于拉格朗日分析力学建立了多刚体系统姿态动力学模型,分析了该系统的稳定性和可控制性,设计了LQR姿态控制器,给出了航天器三轴姿态控制响应特性,并针对行星际轨道转移过程中太阳帆航天器的姿态控制进行了数值仿真。NASA新千年计划 ST7任务在太阳帆航天器姿态控制方案设计中同时采用了转动控制杆、反作用飞轮以及控制喷嘴(如图6所示)。有效载荷舱安置于控制杆顶端,舱内载有反作用飞轮系统;舱外壁各方向装有12个控制喷嘴。利用飞轮控制力矩和喷气力矩辅助转动控制杆进行姿态控制[8]。然而该方案仍处于初步研究阶段,未进一步考虑实际飞行任务中航天器系统各硬件的控制带宽要求,以及定位精度、柔性振动等因素[25]。
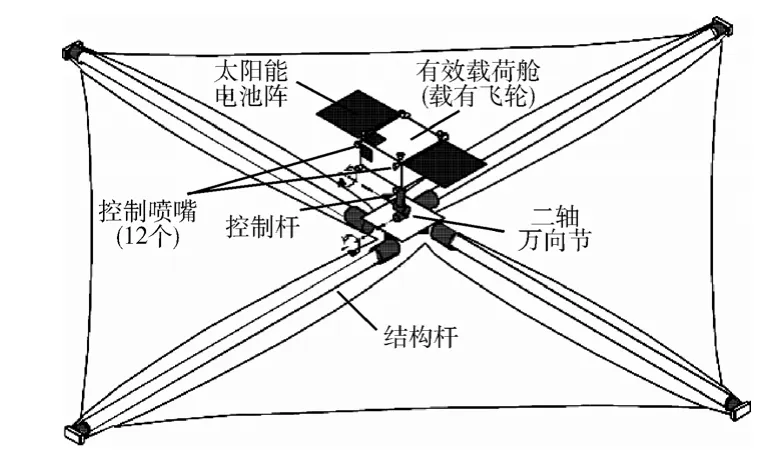
图6 NMP ST7太阳帆航天器结构图Fig. 6 Solar sail spacecraft of NMP ST7
以上研究均对太阳帆航天器结构作了刚体假设,未考虑太阳帆柔性因素。崔乃刚等针对基于控制杆和控制翼面联合控制的太阳帆航天器,将帆面质量均匀等效到4根结构杆上,并将结构杆视为欧拉-伯努利悬臂梁,建立了考虑弹性振动的太阳帆姿态动力学模型(简化后的结构模型如图7所示)。针对航天器俯仰姿态设计了含有 Bang-Bang控制项的PD控制器,以超地球同步转移轨道上的太阳帆航天器为对象进行数值仿真,结果表明该方案可以满足偏航轴对地定向任务的精度需要[26-28]。

图7 考虑柔性振动的太阳帆航天器简化结构Fig. 7 Simplified structure of solar sail spacecraft with consideration of flexible vibrations
翟坤等[29]针对带有控制杆和控制翼面的太阳帆航天器,基于拉格朗日方程建立了系统柔性多体动力学模型,将姿态控制分解为帆面姿态控制和有效载荷舱姿态控制,分析两种姿态运动的耦合影响,并基于前馈+反馈的控制策略,设计太阳帆多体复合姿态控制系统,最后以超地球同步转移轨道太阳帆航天器对日定向问题为例进行数值仿真,验证了该方案的姿态控制效果。
基于转动控制杆的太阳帆姿态控制方案具有执行机构简单、可满足快速大角度机动的优点。缺点是有效载荷与帆面的相对位置在姿态控制过程中不断发生改变,不利于对地通信的保持和定向观测任务的稳定进行。另外,仅利用控制杆无法实现三轴姿态控制,需对滚转姿态引入额外的辅助执行机构,如此一来又进一步增加了系统的结构复杂度。
2.2.3 基于移动滑块的姿态控制方案
Wie等[30-31]提出了一种基于移动滑块的太阳帆航天器姿态控制方案。其姿态控制原理如下:太阳帆上装载有沿结构杆做可控运动的滑动质量块,通过改变滑块位置使系统质心位置改变,与太阳帆光压压心产生偏移,即可产生绕俯仰轴和偏航轴的光压姿态控制力矩。
与采用控制杆的姿态控制方案相类似,仅采用移动滑块无法对航天器滚转姿态进行单独控制。为引入该姿态的控制力矩,Wie在基于移动滑块的姿态控制方案基础上加入了滚转轴稳定条(Roll Stabilizer Bars,RSB)作为辅助姿态执行机构(如图8所示)。

图8 带有移动滑块和RSB的太阳帆航天器结构Fig. 8 Structure of solar sail spacecraft with moving mass and RSB
RSB为安装于结构杆末端的机械装置(图9),可绕结构杆轴转动。每片等腰直角三角形太阳帆的底边两端点均与RSB相连。当4个RSB装置同时转过相同的角度时,可带动4片等腰直角形太阳帆发生旋转。太阳光压sF作用于各帆面形心处,产生4个大小相同、方向两两相反的光压作用分力,构成两对共面力偶。两对力偶作用于帆面,即产生沿帆面法线方向的控制力矩,以实现对滚转姿态的控制。

图9 RSB工作原理示意图Fig. 9 Structure and working principle of RSB
罗超等[32]针对带有滑块和RSB的太阳帆航天器设计了三轴姿态控制系统,通过数值仿真研究了三轴姿态控制的短期响应特性。并以中国科学院国家空间科学中心提出的SPORT任务为背景进行数值仿真,结果表明,带有滑块和RSB的姿态控制方案在太阳帆航天器从黄道面轨道向太阳极地轨道转移过程中取得良好的姿态控制效果。
基于移动滑块的太阳帆航天器姿态控制方案保证了星体有效载荷与帆的相对位置固定,有利于星-地间通信及有效载荷正常工作的稳定保持;对于太阳帆的展开过程没有特殊要求,执行机构简单紧凑,保障了姿态控制系统的可靠性。缺点在于同样需要引入辅助控制机构对滚转姿态进行控制,增加了系统的结构复杂度。
2.2.4 基于帆面参数调整的姿态控制方案
除了利用各种机构机械运动获取太阳光压控制力矩以外,另一种获取光压控制力矩的思路是改变太阳帆部分帆面的物理参数,如在帆面设计时选用可改变反射率/透射率的智能材料等。Kislov提出可在太阳帆外表面覆盖镀铬聚合薄膜,该材料在不同电势作用下会改变自身反射率及透射率,即可以对太阳帆产生姿态控制力矩。Kislov针对不考虑质心/压心偏距的太阳帆航天器进行了数值仿真,结果表明该方案可有效保持航天器俯仰轴、偏航轴姿态稳定[33]。
JAXA研制的IKAROS采用了基于帆面参数调整的姿态控制技术。由于 IKAROS是利用自旋过程中的离心力进行帆面展开,因此没有刚性支撑结构,难以装载含有机械运动部件的姿态执行机构。IKAROS在靠近太阳帆边缘处覆盖有若干薄膜型液晶元件(如图10),通过切换液晶元件电流的通断状态,可使液晶元件的反射/透射状态发生改变,以调整照射在太阳帆边缘的光压大小分布,从而产生光压姿态控制力矩[5-6,34]。

图10 IKAROS结构示意图Fig. 10 Structure of IKAROS
基于帆面参数调整的姿态控制方案不需要任何运动执行机构,大大降低了太阳帆航天器的结构复杂度与发射质量,适合于不宜装载复杂机械执行机构的小型太阳帆。由于该方案已在 IKAROS上成功实施,获得了宝贵的实践经验,对未来的太阳帆姿态控制研究有着巨大的借鉴价值。
2.2.5 基于帆面构型的姿态控制方案
除了上述介绍的针对方形太阳帆设计的姿态控制方案以外,国内外研究者还提出了一些特殊的研究思路,考虑通过设计特殊构型的太阳帆以实现航天器被动姿态稳定控制。
van de Kolk考虑通过设计太阳帆航天器的物理构型,提出可以将两片或两片以上的矩形帆以一定的角度组成太阳帆,通过设计各片帆的物理参数和帆面夹角使得航天器实现被动姿态稳定控制。van de Kolk除了考虑轨道与姿态间的相互耦合外,在建模过程中还综合研究了重力梯度力矩以及多片帆之间二次反射引入的姿态干扰力矩对姿态控制影响。初步研究表明,使用多个帆面的太阳帆航天器被动控制是一种很有价值的控制方案[35]。
张治国等[36]研究了沿对数螺线轨道飞行的星际航行任务,该任务要求航天器姿态与太阳光线方向成一个固定的角度,普通的对称形状太阳帆的被动姿态控制难以满足上述要求。他们利用非对称的太阳帆构型设计实现了被动姿态控制(图11),建立了航天器轨道-姿态耦合动力学模型并进行数值仿真。结果表明:在空间干扰微弱的环境条件下,该方案可较好地实现被动姿态稳定,但对于初始姿态控制误差,尤其是角速度误差的修正能力比较弱。因此,在进行被动姿态稳定控制前,需先利用其他控制手段将初始姿态角速度误差减小到允许范围内。
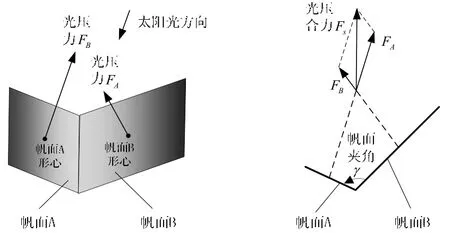
图11 非对称构型的太阳帆航天器结构示意图Fig. 11 Structure of asymmetrical solar sail spacecraft
3 总结与展望
目前国内外提出的各种典型太阳帆航天器姿态控制方案均有各自的优点和缺点:自旋稳定方案易于实施,但仅能实现单轴稳定,且对太阳帆航天器外形有要求,维持系统自旋和进行进动、章动控制需要施加喷气力矩,耗费推进工质较多;基于控制翼面的姿态控制方案结构简单,可实现三轴姿态主动控制和被动姿态稳定,缺点在于控制力矩较小;基于转动控制杆的姿态控制方案执行机构简单,控制效果较好,缺点在于无法对滚转姿态单独控制,且有效载荷与帆面相对位置不固定;基于移动滑块的姿态控制方案控制效果好且执行机构简单紧凑,缺点同样是无法单独控制滚转姿态;基于帆面参数调整的姿态控制方案无需机械执行机构,并已有实际成功飞行案例,缺点在于控制力矩大小有限,对帆面材料技术有较高要求;基于帆面构型的姿态控制方案仅能实现被动姿态控制,无需消耗工质和能量,但抗干扰能力较弱且控制精度相对较低。
未来太阳帆航天器姿态控制方案的主要设计思路如下:
1)组合现阶段已有的多种姿控执行机构进行方案设计。多种执行机构联合控制可弥补各自的劣势,同时使系统保有冗余备份,为任务的安全性和可靠性提供保障。由于搭载多种姿态执行机构必然会增加系统复杂度,该设计思路比较适合于大型太阳帆的长期任务。
2)设计全新的姿控执行机构。考虑到现有太阳帆航天器的姿态控制技术体系还有很大拓展空间,可尝试通过引入材料学、光学、热学等其他领域的前沿成果进行姿控执行机构设计;同时可尝试研发新型太阳帆结构,将姿态控制方案设计与帆体构型设计相结合。
目前太阳帆推进技术研究在世界范围内仍处于起步阶段,随着日本和美国相继成功发射太阳帆航天器,各国航天机构将会对太阳帆推进技术投入更多的关注,也必然会迎来太阳帆航天器任务的研究机遇和挑战。
(References)
[1]Leipold M, Eiden M, Garner C E, et al. Solar sail technology development and demonstration[J]. Acta Astronautica, 2003, 52(2): 317-326
[2]Greschik G, Mikulas M M. Design study of a square solar sail architecture[J]. Journal of Spacecraft and Rockets, 2002, 39(5): 653-661
[3]Johnson L, Young R, Montgomery E. Recent advances in solar sail propulsion systems at NASA[J]. Acta Astronautica, 2007, 61(1): 376-382
[4]Leipold M, Garner C E, Freeland R, et al. Odissee: a proposal for demonstration of a solar sail in earth orbit[J].Acta Astronautica, 1999, 45(4): 557-566
[5]Mori O, Sawada H, Funase R, et al. First solar power sail demonstration by IKAROS[J]. Transactions of the Japanese Society for Artificial Intelligence, 2011, 27(8):425-431
[6]Tsuda Y, Mori O, Funase R, et al. Flight status of IKAROS deep space solar sail demonstrator[J]. Acta Astronautica, 2011, 69(9): 833-840
[7]Johnson L, Young R, Montgomery E, et al. Status of solar sail technology within NASA[J]. Advances in Space Research, 2011, 48(11): 1687-1694
[8]Wie B. Solar sail attitude control and dynamics: Part 1[J].Journal of Guidance, Control, and Dynamics, 2004,27(4): 526-535
[9]Vulpetti G. 3D high-speed escape heliocentric trajectories by all-metallic-sail low-mass sailcraft[J]. Acta Astronautica,1996, 39(1-4): 161-170
[10]Coverstone V L, Prussing J E. Technique for escape from geosynchronous transfer orbit using a solar sail[J].Journal of Guidance, Control and Dynamics, 2003,26(4): 628-634
[11]Romagnoli D, Oehlschlägel T. High performance two degrees of freedom attitude control for solar sails[J].Advances in Space Research, 2011, 48(11): 1869-1879
[12]Bookless J, McInnes C. Dynamics and control of displaced periodic orbits using solar-sail propulsion[J].Journal of Guidance, Control, and Dynamics, 2006,29(3): 527-537
[13]Johnson L, Whorton M, Heaton A, et al. NanoSail-D: a solar sail demonstration mission[J]. Acta Astronautica,2011, 68(5): 571-575
[14]McInnes C R. Solar sailing: Technology, dynamics and mission applications[M]. Springer, 2004
[15]Wie B. Dynamic modeling and attitude control of solar sail spacecraft: Part 1[C]//AIAA Guidance, Navigation,and Control Conference and Exhibit. Monterey, USA,2002
[16]Derbes B, Lichodziejewski D, Veal G. A “yank and yaw”control system for solar sails[J]. Advances in the Astronautical Sciences, 2004, 19: 2893-2907
[17]Mettler E, Acikmese A B, Ploen S R. Attitude dynamics and control of solar sails with articulated vanes[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. San Francisco, USA, 2005
[18]Lawrence D A, Piggott S. Integrated trajectory and attitude control for a four-vane solar sail[C]//AIAA Guidance, Navigation, and Control Conference. San Francisco, USA, 2005
[19]骆军红, 李晓东, 冯军华. 太阳帆航天器被动姿态控制研究[J]. 飞行力学, 2008, 26(5): 47-50 Luo Junhong, Li Xiaodong, Feng Junhua. Passive attitude control of solar sail spacecraft[J]. Flight Dynamics, 2008, 26(5): 47-50
[20]Wie B, Murphy D, Thomas S, et al. Robust attitude control systems design for solar sails, part 2: microPPT-based backup ACS[C]//AIAA Guidance, Navigation,and Control Conference. Providence, USA, 2004
[21]Diedrich B L. Attitude control and dynamics of solar sails[D]. University of Washington, 2001
[22]Wie B. Solar sail attitude control and dynamics: Part 2[J]. Journal of Guidance, Control, and Dynamics, 2004,27(4): 536-544
[23]Wie B, Murphy D. Solar-sail attitude control design for a flight validation mission[J]. Journal of Spacecraft and Rockets, 2007, 44(4): 809-821
[24]崔祜涛, 骆军红, 崔平远, 等. 基于控制杆的太阳帆姿态控制研究[J]. 宇航学报, 2008, 29(2): 560-566 Cui Hutao, Luo Junhong, Cui Pingyuan, et al. Attitude control of solar sail spacecraft with control boom[J].Journal of Astronautics, 2008, 29(2): 560-566
[25]张国庆, 王永, 梁青, 等. 太阳帆航天器姿态控制进展[C]//中国宇航学会深空探测技术专业委员会第三届学术会议论文集, 2006
[26]崔乃刚, 刘家夫, 荣思远. 柔性太阳帆航天器动力学建模与姿态控制[J]. 哈尔滨工业大学学报, 2011,43(7): 1-5 Cui Naigang, Liu Jiafu, Rong Siyuan. Study on dynamics modeling and attitude control of flexible solar sail spacecraft[J]. Journal of Harbin Institute of Technology, 2011, 43(7): 1-5
[27]崔乃刚, 刘家夫, 荣思远. 太阳帆航天器动力学建模与求解[J]. 航空学报, 2010, 31(8): 1565-1571 Cui Naigang, Liu Jiafu, Rong Siyuan. Solar sail spacecraft dynamic modeling and solving[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(8):1565-1571
[28]刘家夫, 沈凡, 荣思远, 等. 太阳帆动力学建模与姿态控制[J]. 哈尔滨工程大学学报, 2011, 32(12):1582-1587 Liu Jiafu, Shen Fan, Rong Siyuan, et al. Research on solar sail dynamic modeling and attitude control[J].Journal of Harbin Engineering University, 2011, 32(12):1582-1587
[29]翟坤, 宝音贺西. 柔性太阳帆多体复合姿态控制研究[C]//第七届全国多体系统动力学暨第二届全国航天动力学与控制学术会议论文集, 2011
[30]Wie B, Murphy D, Paluszek M, et al. Robust attitude control systems design for solar sails, part 1:propellantless primary ACS[C]//AIAA Guidance,Navigation, and Control Conference and Exhibit.Providence, USA, 2004
[31]Thomas S, Paluszek M, Wie B, et al. AOCS performance and stability validation for large flexible solar sail spacecraft[C]//41stAIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Tucson, USA, 2005
[32]罗超, 郑建华. 采用滑块和 RSB 的太阳帆姿态控制[J].哈尔滨工业大学学报, 2011, 43(3): 95-101 Luo Chao, Zheng Jianhua. Solar-sail attitude control based on moving masses and roll stabilizer bars[J].Journal of Harbin Institute of Technology, 2011, 43(3):95-101
[33]Kislov N. Variable reflectance/transmittance coatings for solar sail attitude control and three axis stabilization[C]//AIP Conference Proceedings. Albuquerque,USA, 2004
[34]沈自才, 张帆, 赵春晴, 等. IKAROS太阳帆的关键技术分析与启示[J]. 航天器工程, 2012, 21(2): 101-107 Shen Zicai, Zhang Fan, Zhao Chunqing, et al. Key technology analysis and enlightenment of IKAROS solar sail[J]. Spacecraft Engineering, 2012, 21(2):101-107
[35]van de Kolk C B, Flandro G A. Solar sail passive attitude stability and control[C]//AIP Conference Proceedings. Albuquerque, USA, 2001
[36]张治国, 李俊峰. 沿螺线轨道飞行的太阳帆航天器姿态被动控制研究[J]. 工程力学, 2008, 25(7): 212-216 Zhang Zhiguo, Li Junfeng. Study on passive attitude control for solar sail with a spiral trajectory[J].Engineering Mechanics, 2008, 25(7): 212-216
猜你喜欢
天然气与石油(2022年4期)2022-09-21
探测与控制学报(2022年4期)2022-08-30
兵器装备工程学报(2021年12期)2022-01-11
农业技术与装备(2020年1期)2020-03-04
探测与控制学报(2018年3期)2018-07-09
航空模型(2017年10期)2018-02-23
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
空间控制技术与应用(2015年1期)2015-06-05
