
AMT车辆自动离合器控制系统开发*
2014-01-08 03:39高炳钊
传动技术 2014年3期
王 斌 高炳钊 陈 虹,2
1.吉林大学汽车仿真与控制国家重点实验室,长春130025;2.吉林大学控制理论与控制工程系,长春130025
1 前言
电控机械式自动变速器(Automatic Mechanical Transmission,简称AMT)是在原有干式离合器和定轴齿轮式有级机械变速器基础上改装而成的自动变速器。与其他自动变速器相比,AMT具有结构简单、制造成本低、传动效率高、适用车型广等优点,有较高的性价比,适合我国国情。然而AMT采用的干式离合器的分合过程会导致舒适性变差,这制约着AMT的推广。自动离合器系统控制策略的开发对于解决AMT的平顺性问题至关重要。
在AMT自动离合器的控制中,离合器起步控制是控制难点之一。其控制目标有三点:1)车辆起步平稳,冲击度小;2)滑摩功尽可能小,延长离合器寿命;3)充分反映驾驶员起步意图。在起步过程中既要求车辆行驶平稳没有冲击,又要保证离合器的使用寿命即起步滑磨功小,前者要求离合器接合时间长,后者要求接合时间短,二者的矛盾给离合器最佳接合规律的制定带来了一定的难度。
目前最普遍的离合器控制算法是发动机恒转速控制算法,这种控制算法在应用到实车时,标定目标繁多,调试非常复杂。鉴于此,本文采用考虑驾驶员意图、冲击度和滑摩功的离合器优化控制算法对离合器进行控制,从而提高起步过程的平顺性,并且大大降低系统开发的标定工作量。并且通过模型仿真及快速原型测试对控制算法进行了标定与测试。
2 样车搭建
设计了AMT离合器执行机构,并对一汽轿车公司生产的奔腾B50汽车进行改装,将该执行机构安装到B50车上,取代离合器踏板的工作,构成了自动离合器变速箱。同时通过B50的诊断座采集CAN总线的信号,通过Micro AutoBox实现与汽车的通信,对数据进行处理,控制离合器的运动。
2.1 自动离合器执行机构设计
本文设计的自动离合器执行机构采用直流电机作为动力源,利用高传动效率的滚珠丝杠作为动力转换装置,将电机的旋转运动转换为直线运动,再通过一系列杆件推动汽车离合器运动。
由于滚珠丝杠的传递效率很高,同时也有很高的逆效率,即当驱动电机断电后,滚珠丝杠不能自行锁止在当前位置,而会在膜片弹簧力作用下运动。因此在滚珠丝杠和电机之间加装逆止器,电机的运动可以通过逆止器传递给滚珠丝杠,而滚珠丝杠的运动无法通过逆止器传递过来,可以保证电机断电后,汽车离合器可以保持在当前位置,既节省能量又提高电机的使用寿命。下图为执行机构设计图。

图1 离合器执行机构Fig.1 clutch actuator1—直流电机,2—逆止器,3—滚珠丝杠1—DC motor,2—non-return device,3—ball screw
2.2 总线改装
本文设计了H桥电机驱动器,下图2为其原理图。从汽车的诊断座将CAN总线信号接出。将CAN总线传输的汽车行驶数据传输到Micro Auto-Box,根据驾驶员的操作意图及汽车的行驶数据来控制离合器的运动。电动离合器的信号传递方向及执行原理如下图3所示。

图2 H桥驱动电路图Fig.2 H-bridge driving circuit

图3 自动离合器车辆原理图Fig.3 the principle of the vehicle with automatic clutch

图4 试验车Fig.4 the test vehicle
3 控制策略开发流程
对于控制策略的开发依循以下四步开发流程进行。首先,对控制器和被控对象(试验车)建模,分别形成控制器模型和仿真模型,通过联合仿真在仿真模型上实施控制算法对控制参数进行标定。然后,进行快速原型测试,利用dSPACE公司生产的Micro AutoBox将第一步标定后的控制前期与实车相连接,通过实车测试进行控制参数标定。这些早期的功能测试可以提前测试控制器性能并进行高效率的控制器参数标定,此外还可以大大减少软件故障率。之后,将设定好的控制器模型转换为实际电控单元ECU的软件代码,对其进行硬件在环测试。最后,用实际的ECU在实车上进行测试和标定。下图5即为开发流程图。
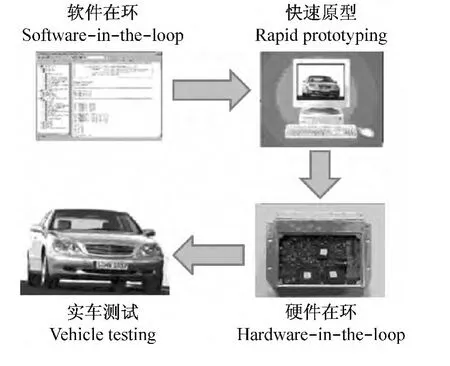
图5 开发流程Fig.5 The development process
本文将就控制策略的模型仿真和快速原型测试进行阐述,通过这两步开发实现控制策略的基本功能。
4 样车仿真模型搭建
4.1 样车仿真模型搭建
根据奔腾B50的发动机、传动系等车辆参数搭建样车传动系统的AMESim模型。如下图所示。

图6 样车的传动系统AMESim模型Fig.6 Drivetrain AMESim model of the test vehicle
4.2 模型校验
模型与样车的匹配程度决定了仿真结果的可靠性。本文对模型和样车给以相同的离合器信号和油门踏板信号,采集汽车的发动机转速和车速信号进行比较。下图为离合器从部分接合到全接合过程以及油门从20%开度到50%开度过程的模型仿真结果和实验值对比。

图7 模型校验Fig.7 model validation
图中Test为实验值,Simu为仿真值,从图上可以看出,模型的准确度在15%以内,利用此模型进行的仿真对实验具有参考价值。
5 仿真验证
5.1 控制算法设计
传统的恒转速控制算法都是在假定起步时发动机转速不变并且起步时间可以预测的基础上实现的。我们知道,车辆起步过程中这些值是在不断变化的,并且在实现PID控制算法的过程中要标定大量数据,这些标定工作会大大增加开发周期。为了解决以上问题本文设计了基于LQR的优化控制算法对AMT离合器进行起步控制。这个算法可以根据驾驶员对油门踏板和制动踏板的操作判断驾驶员意图,并对离合器位置进行实时调节。
将5档AMT车辆传动系统看成二自由度系统,该系统的运动可以用以下状态方程描述:
其中
x=[ωeωe-ωcTcTeTl] T

式中,Te为发动机扭矩,Tc为离合器输出转矩,Tl为离合器输出端的阻力矩,ωe为发动机转速,ωc为离合器输端出转速,Ie和Iv为转动惯量,Ce和Cv为阻尼系数。
此控制问题就是下面目标函数的最小化问题。

详细推导过程见参考文献[3]。
5.2 控制算法的仿真结果
离合器的接合过程主要分为三个阶段:消除空行程和起步阻力阶段,滑磨阶段,同步阶段。在这三个阶段中滑磨阶段是控制的难点。本文以车辆起步过程中离合器的运动为例来对离合器滑磨过程控制进行研究。
在完成AMESim实验车模型搭建和MATLAB/Simulink控制器模型搭建之后,进行AMES-im-Simulink联合仿真。对汽车小油门、中油门、大油门及坡道起步四种工况进行仿真,得到发动机转矩、离合器输入转速、离合器输出转速的图像。下图给出了中油门情况下的图像。
从以上的仿真结果可以看出,从离合器开始运动到完全结合用时在2秒以内,接合时间短;接合过程平顺,车辆加速度率有一定抖动,但时间很短,幅值不大,对舒适性影响不大,达到了预期效果。
6 快速原型测试
为了进一步对优化控制策略进行测试与调节,将优化控制模型下载到Micro AutoBox。利用Micro AutoBox作为模拟的TCU在已搭建好的实验车上对自动离合器进行控制。同样在小油门、中油门、大油门和坡道起步四种工况进行测试。下面给出了中油门及坡道起步的测试结果。

图8 中油门起步仿真结果Fig.8 Simulation result of the medium throttle angle

图9 中油门起步实验结果Fig.9 Experimental results of medium throttle angle clu为离合器结合深度;clu is the clutch percentage.
从以上的测试结果可以看出,无论什么工况自动离合器接合过程均在2s之内完成,时间短,滑磨功小,有助于延长离合器寿命。并且,离合器接合平顺,发动机转速与扭矩波动很小,坡道起步过程有一定的抖动,也相对较小,达到了实验要求。

图10 坡道起步实验结果Fig.10 Experimental results of the ramp
7 结论
本文提了科学合理的控制系统开发流程,该流程是从模型仿真、快速原型、硬件在环和实车测试四个过程进行开发。依据此流程对AMT自动离合器控制系统进行开发,设计了实验样车,搭建了样车的AMESim模型,运用AMESim-Simulink联合仿真对控制算法进行初步标定,之后对控制策略进行实验车测试。通过模型仿真和快速原型测试可以看出本文设计的优化控制算法应用于AMT自动离合器时,对于提高车辆的平顺性有显著的效果,同时可以明显缩短离合器滑磨时间,减小滑磨功。并且此开发流程科学的缩短了开发周期,降低了开发成本。
[1] 胡川,汽车AMT自动离合器控制算法研究及快速原型系统开发,硕士论文,华中科技大学,2007.
[2] 温新,电动汽车离合器控制系统设计,硕士论文,华中科技大学,2010.
[3] B.-Z.Gao,H.Chen,X.-H.Lu and K.Sanada,An Improved Optimal Controller for Start-up of AMT Trucks in Consideration of Driver’s Intention,International Journal of Automotive Technology,Vol.14,No.2,pp.213?220.2013.
[4] 雷玉龙,葛安林,李永军,离合器起步过程的控制策略,汽车工程,Vol.22,No4,pp266-281.
[5] 姚琳,微车自动离合器电子控制单元,硕士学位论文,武汉理工大学,2010.
[6] Bin Wang,Hanqi Yue,Qi Han,Bingzhao Gao,PID control of an electric clutch actuator,Applied Mechanics and Materials,v 190-191,p 719-723,2012,Digital Manufacturing and Automation III.
[7] 余春晖,陈慧岩,丁华荣,车辆离合器起步阶段模糊控制的研究,Vol.27,No4,pp423-430.
猜你喜欢
岷峨诗稿(2020年4期)2020-11-18
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
汽车电器(2018年8期)2018-08-25
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年2期)2017-05-04
汽车之友(2016年10期)2016-05-16
中国重型装备(2013年1期)2013-11-18
振动与冲击(2012年2期)2012-02-12
